舰船伴随运动模式挖掘方法、系统、设备及存储介质与流程
本发明涉及时空轨迹数据挖掘,尤其涉及一种舰船伴随运动模式挖掘方法系统、设备及存储介质。
背景技术:
1、伴随着移动互联网、大数据技术发展,以及卫星导航定位设备、移动位置服务的广泛应用,运动物体产生了大量航迹点位数据,统称时空轨迹数据。当前随着水上运输行业的发展,为了保障船舶安全航行,国际海事组织、国际航标协会和国际电信联盟强力推广各类舰船安装船舶自动识别系统(ais),用于各类船舶的识别跟踪。船舶自动识别系统的广泛应用产生了大量关于水面舰船的时空轨迹数据。
2、时空轨迹模式的研究内容主要包括频繁模式挖掘、异常模式挖掘、聚集模式挖掘和伴随模式挖掘等。频繁模式挖掘主要是挖掘人类有规律的行为模式。异常模式挖掘通常是挖掘与频繁相对的“不频繁”的行为模式,在智能交通等领域有广泛应用。与热点区域发现不同,聚集模式挖掘挖掘的是人的行为模式而发现热度高的街道或商场等。伴随模式是时空轨迹模式中重要的内容,在挖掘具有相同或相似运动模式的移动对象群体以及研究该移动对象群体中各对象之间的亲近度等方面有着广泛的应用,可以挖掘在一起伴随运动的移动对象群体。一群移动对象表现出相同或相似的运动模式,并且该模式维持了足够长的时间,则该模式可被认为是伴随模式,且所有伴随模式都可以生成时空轨迹。
3、时空轨迹的频繁模式挖掘一般有两种处理方式。第一种是将多条轨迹序列作为处理的对象,通过计算轨迹间的相似度挖掘有意义的频繁模式。这种方式需要考虑如何定义轨迹间的距离。根据相似性度量所涉及的时间区间不同,可将相似度度量分为时间全区间的对应相似,全区间变换对应相似,多子区间对应相似,单子区间对应相似、单点对应相似、无区间对应相似。第二种方式首先将轨迹采样点序列预处理为对应的实体序列,即poi(兴趣点)序列,然后进行频繁模式的挖掘。
4、时空轨迹数据具有丰富的时空特征信息,可以基于数据挖掘技术挖掘其活动规律与行为特征,包括航线提取、轨迹分类、轨迹异常检测、轨迹模式挖掘等。其中轨迹模式挖掘主要研究如何从大量轨迹数据中发现运动物体的运动模式。伴随运动模式挖掘是轨迹模式挖掘的一种,主要研究多个运动物体在多个时间点上的群体性共现行为规律和特征。伴随运动模式挖掘在军事监视以及物种迁徙、交通事件检测等领域都有重要应用价值。
5、2013年郑宇在其原来的研究基础上,将travelling buddy的概念应用到了更多复杂的场景之中,实验表明基于travelling buddy的挖掘算法比现存的伴随模式挖掘算法具有更高的时间效率。
6、2008年hoyoung jeung和周晓方等人提出的挖掘convoy模式的cmc算法是最经典的算法之一,其算法思想深刻影响了后续很多伴随模式的挖掘算法。不过该算法时间效率低下,并且可能将“滞留"于某个固定区域内的移动对象群体构成的时空轨迹模式错误地判断为伴随模式。并且该类算法要求所有移动对象的采样间隔是相同的,该条件在现实生活中是很难满足的。
7、2012年郑宇等人提出的基于travelling buddy的伴随模式挖掘算法相较以往的算法在时间效率上已经有了较大地提升,但是并未针对目前的大数据环境进行性能优化。当面临大数据时,该算法以及其他已有的算法的耗时将是不可接受的。例如有客户需要短时间内挖掘出一年甚至几年内采集到的时空数据中隐含的伴随模式,则现有算法都将无法胜任该任务。在当前的生产生活中,对实时的伴随模式挖掘有着巨大的需求,显然现存的算法已经不能满足实际需要。
8、综上所述,针对给定运动物体的每一个时间点位,均需要遍历所有其他运动物体在该时间点与其是否为伴随点,搜索空间大,计算量大,耗时长,伴随挖掘模式主要的问题是现有算力不足以支撑伴随运动模式及时的挖掘分析。
技术实现思路
1、为解决上述现有技术中存在的技术问题,本发明的目的在于提供一种的舰船伴随运动模式挖掘方法、系统、设备及存储介质,缩短伴随模式挖掘分析的耗时,满足对运动物体伴随模式的快速挖掘需要。
2、为实现上述发明目的,本发明的技术方案是:
3、本发明提供一种舰船伴随运动模式挖掘方法,包括以下步骤:
4、步骤s1、初步构建运动物体集合ai;
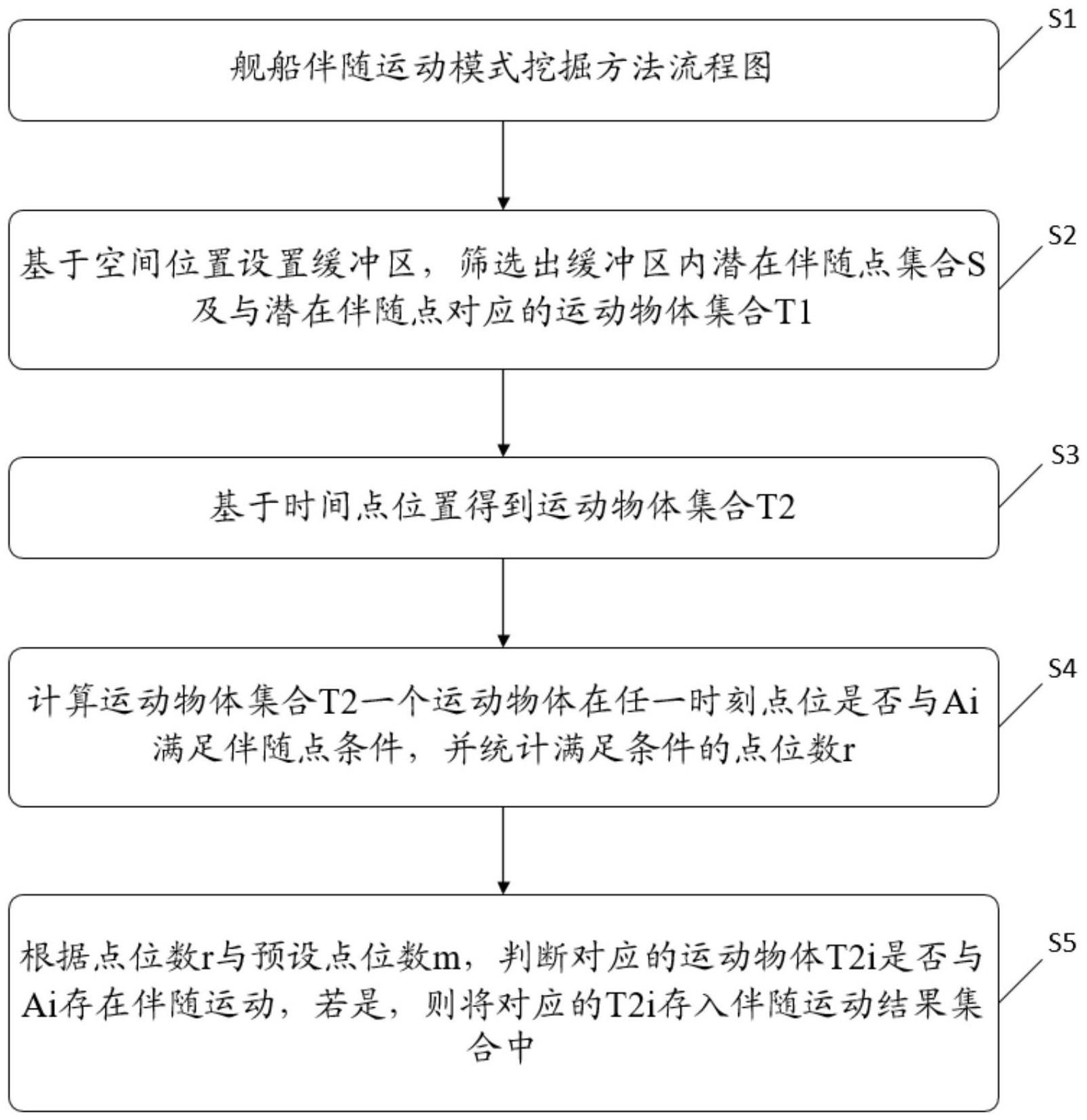
5、步骤s2、基于空间位置设置缓冲区,筛选出缓冲区内潜在伴随点集合s及与潜在伴随点对应的运动物体集合t1;
6、步骤s3、基于时间点位置得到运动物体集合t2;
7、步骤s4、计算运动物体集合t2一个运动物体在任一时刻点位是否与ai满足伴随点条件,并统计满足条件的点位数r;
8、步骤s5、根据点位数r与预设点位数m,判断对应的运动物体t2i是否与ai存在伴随运动,若是,则将对应的t2i存入伴随运动结果集合中。
9、根据本发明的一个方面,在进行所述步骤s3之前,引入注意力机制,以关键目标链更新运动物体集合t1。
10、根据本发明的一个方面,在所述步骤s1中,包括:
11、在时间范围为ts-te的时间段内,获取时空轨迹数据中包含n个运动物体,确定运动物体集合ai,i=1,2,……n,设置预设点位数m。
12、根据本发明的一个方面,在所述步骤s2中,包括:
13、步骤s21、确定一个在时间范围ts-te内的运动物体ai的航迹;
14、步骤s22、沿运动物体ai的航迹将半径为d的区域设置为缓冲区;
15、步骤s23、筛选出缓冲区内潜在伴随点集合s及与潜在伴随点对应的运动物体集合t1。
16、根据本发明的一个方面,在所述步骤s3中,具体包括:
17、步骤s31、确定运动物体集合ti中的一个运动物体t1i;
18、步骤s32、判断运动物体t1i的落入潜在伴随点集合s的数量是否大于预设阈值p;
19、步骤s32、若是则将对应的运动物体t1i加入更新集合t2中。
20、根据本发明的一个方面,在以关键目标链更新运动物体集合t1中,具体包括:
21、步骤s25、将检测目标分为关键目标链和非关键目标链;
22、步骤s26、设置关键目标链对应的计算缓冲区和非关键非关键目标链对应的汇入缓冲区;
23、步骤s27、遍历运动物体集合t1,计算得到计算缓冲区和汇入缓冲区;
24、步骤s28、以计算缓冲区更新缓冲区。
25、根据本发明的一个方面,在所述步骤s27中,计算得到计算缓冲区ha和汇入缓冲区hb的公式为:
26、
27、
28、其中,δσ平均分析时间,tlink为关键目标链。
29、根据本发明的一个方面,提供了一种舰船伴随运动模式挖掘系统,包括:
30、构建单元,用于初步构建运动物体集合ai;
31、筛选单元,用于基于空间位置设置缓冲区,筛选出缓冲区内潜在伴随点集合s及与潜在伴随点对应的运动物体集合t1;
32、计算单元,用于基于时间点位置得到运动物体集合t2;
33、所述计算单元,还用于计算运动物体集合t2一个运动物体在任一时刻点位是否与ai满足伴随点条件,并统计满足条件的点位数r;
34、判断单元,用于根据点位数r与预设点位数m,判断对应的运动物体t2i是否与ai存在伴随运动,若是,则将对应的t2i存入伴随运动结果集合中。
35、根据本发明的一个方面,提供了一种电子设备,包括:一个或多个处理器、一个或多个存储器、以及一个或多个计算机程序;其中,处理器与存储器连接,上述一个或多个计算机程序被存储在存储器中,当电子设备运行时,该处理器执行该存储器存储的一个或多个计算机程序,以使电子设备执行如上述技术方案中任一项所述的一种舰船伴随运动模式挖掘方法。
36、根据本发明的一个方面,提供了一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,实现如上述技术方案中任一项所述一种舰船伴随运动模式挖掘方法。
37、本发明与现有技术相比,具有如下有益效果:
38、根据本发明的一个方案,通过缓冲区分析,在所有时空轨迹中筛选出在缓冲区内的运动物体集合,之后再按照遍历方式,寻求满足伴随运动条件的运动物体合集和伴随点位,在时间和空间上对缓冲区进行更新,缩小搜索空间,降低了计算量,从而缩短了伴随模式挖掘分析的耗时,有利于提高伴随模式挖掘分析的快速可用,满足对运动物体伴随模式的快速挖掘需要。
- 还没有人留言评论。精彩留言会获得点赞!