焊缝识别模型、管道图像的处理方法、系统、设备及介质与流程
本发明涉及图像模型训练,尤其是一种焊缝识别模型的处理方法、管道图像的处理方法、焊缝识别模型的处理系统、管道图像的处理系统、设备及介质。
背景技术:
1、在工业视觉技术开发与应用领域,高质量的精准数据标注是工业视觉模型获得优良性能的基础,而现有开源标注工具主要面向自然环境场景,如安防监控、自动驾驶等领域,其缺乏工业定制化专用标注能力,且大规模数据标注工作需委托第三方专业标注团队在云端开展,存在较大数据安全管控风险。
2、焊缝x射线图像是一种典型的工业图像。工业图像种类多样(红外、x射线等),对标注质量有较高要求,常规软件无法适应工业影像特殊预处理要求(如对比度增强、灰度均衡化、去噪等)。
3、在焊接过程中,由于存在焊接参数(焊接功率、保护气体流量、焊接速度)可能由于调节不当及焊接环境复杂等不确定因素,导致焊缝内部出现凹陷、咬边、气孔、未熔合、熔宽余高未达标等内部缺陷。为了保证焊接件产品质量,需对焊缝区域进行高效、精准的缺陷检测。
4、x射线成像是一种常见的焊缝无损检测手段,图像具备焊缝缺陷目标极小,并且分布稀疏的特点。因此在标注训练焊缝x图像时,需要除了标注焊缝缺陷位置之外还需要标注焊缝区域,并且由于缺陷分布稀疏,需要标注大量图像才能满足训练要求,导致标注任务十分艰巨并缓慢。
5、目前采用的标注手段是使用普通标注工具,先由专业持证检测人员对具体的焊缝缺陷进行标注,然后再由普通标注人员补充焊缝区域的标注。标注过程繁杂,耗费大量时间和人力成本,且人工标注的标准难以统一,导致输出结果之间存在差异,对后续的缺陷识别流程造成干扰。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中标注效率低、成本高且输出结果存在差异的缺陷,提供一种焊缝识别模型的处理方法、管道图像的处理方法、焊缝识别模型的处理系统、管道图像的处理系统、设备及介质。
2、本发明是通过下述技术方案来解决上述技术问题:
3、第一方面提供一种焊缝识别模型的处理方法,所述处理方法包括:
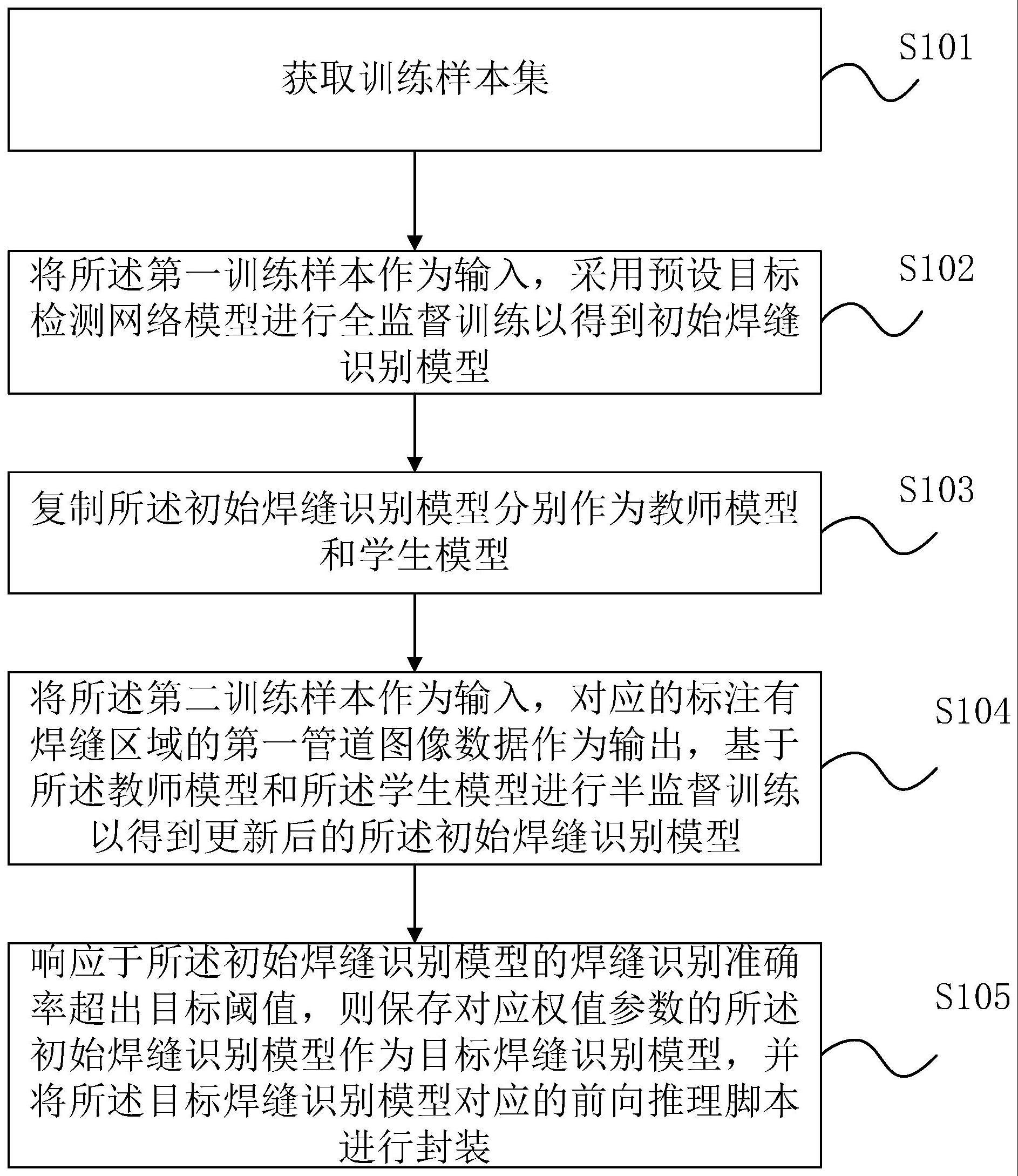
4、获取训练样本集,所述训练样本集包括第一训练样本和第二训练样本;
5、其中,所述第一训练样本为标注出焊缝区域的管道图像数据,所述第二训练样本为未标注出焊缝区域的管道图像数据;
6、将所述第一训练样本作为输入,采用预设目标检测网络模型进行全监督训练以得到初始焊缝识别模型;
7、复制所述初始焊缝识别模型分别作为教师模型和学生模型;
8、将所述第二训练样本作为输入,对应的标注有焊缝区域的第一管道图像数据作为输出,基于所述教师模型和所述学生模型进行半监督训练以得到更新后的所述初始焊缝识别模型;
9、响应于所述初始焊缝识别模型的焊缝识别准确率超出目标阈值,则保存对应权值参数的所述初始焊缝识别模型作为目标焊缝识别模型,并将所述目标焊缝识别模型对应的前向推理脚本进行封装。
10、较佳地,所述预设目标检测网络模型采用yolo网络模型。
11、较佳地,所述基于所述教师模型和所述学生模型进行半监督训练以得到更新后的所述初始焊缝识别模型的步骤包括:
12、将所述第一训练样本输入所述学生模型,输出得到标注有焊缝区域的第二管道图像数据;
13、基于所述第一训练样本与所述第二管道图像数据计算得到第一损失;
14、将经过弱增强处理的所述第二训练样本输入所述教师模型,输出得到具有伪标注的第三管道图像数据;
15、将经过强增强处理的所述第三管道图像数据输入所述学生模型进行前向推理得到所述第一管道图像数据;
16、基于所述第一管道图像数据与所述第三管道图像数据计算得到第二损失;
17、基于所述第一损失和所述第二损失计算总损失,并基于所述总损失对所述学生模型进行反向推理,更新所述学生模型的权值参数;
18、将更新后的所述权值参数基于ema算法对所述教师模型进行同步,完成一次迭代;
19、将更新后的所述学生模型和所述教师模型重复执行所述半监督训练步骤,直至所述初始焊缝识别模型的焊缝识别准确率超出目标阈值。
20、较佳地,所述弱增强处理包括将所述第二训练样本进行垂直和/或水平翻转;
21、所述强增强处理包括对所述第三管道图像数据进行随机图像属性变化、灰度变化和高斯模糊变化中的至少一种变化。
22、较佳地,所述管道图像数据包括具有环形焊缝的管道的扫描图像数据。
23、第二方面提供一种管道图像的处理方法,所述管道图像的处理方法包括:
24、获取待识别管道图像数据;
25、将所述待识别管道图像数据输入目标焊缝识别模型,基于对应的前向推理脚本解析所述目标焊缝识别模型,得到所述待识别管道图像数据对应的标注有焊缝区域的目标图像数据;
26、其中,所述目标焊缝识别模型以及所述前向推理脚本基于前述的焊缝识别模型处理方法得到;
27、识别所述焊缝区域内的焊接缺陷。
28、第三方面提供一种焊缝识别模型的处理系统,所述处理系统包括:样本获取模块、全监督训练模块、复制模块、半监督训练模块和处理模块;
29、所述样本获取模块,用于获取训练样本集,所述训练样本集包括第一训练样本和第二训练样本;其中,所述第一训练样本为标注出焊缝区域的管道图像数据,所述第二训练样本为未标注出焊缝区域的管道图像数据;
30、所述全监督训练模块,用于将所述第一训练样本作为输入,采用预设目标检测网络模型进行全监督训练以得到初始焊缝识别模型;
31、所述复制模块,用于复制所述初始焊缝识别模型分别作为教师模型和学生模型;
32、所述半监督训练模块,用于将所述第二训练样本作为输入,对应的标注有焊缝区域的第一管道图像数据作为输出,基于所述教师模型和所述学生模型进行半监督训练以得到更新后的所述初始焊缝识别模型;
33、所述处理模块,用于响应于所述初始焊缝识别模型的焊缝识别准确率超出目标阈值,则保存对应权值参数的所述初始焊缝识别模型作为目标焊缝识别模型,并将所述目标焊缝识别模型对应的前向推理脚本进行封装。
34、第四方面提供一种管道图像的处理系统,所述管道图像的处理系统包括:图像获取模块、焊缝识别模块和缺陷识别模块;
35、所述获取模块,用于获取待识别管道图像数据;
36、所述焊缝识别模块,用于将所述待识别管道图像数据输入目标焊缝识别模型,基于对应的前向推理脚本解析所述目标焊缝识别模型,得到所述待识别管道图像数据对应的标注有焊缝区域的目标图像数据;
37、其中,所述目标焊缝识别模型以及所述前向推理脚本基于前述的焊缝识别模型的处理系统得到;
38、所述缺陷识别模块,用于识别所述焊缝区域内的焊接缺陷。
39、第五方面提供一种电子设备,包括存储器、处理器及存储在存储器上并用于在处理器上运行的计算机程序,所述处理器执行计算机程序时实现如前述的焊缝识别模型的处理方法;或,实现如前述的管道图像的处理方法。
40、第六方面提供一种计算机存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如前述的焊缝识别模型的处理方法;或,实现如前述的管道图像的处理方法。
41、在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
42、本发明的积极进步效果在于:通过将包括焊缝区域的管道图像数据输入,以目标检测算法yolov5为基础结合平均教师模型的半监督训练算法的模型训练网络,得到能够泛用于各类管道图像的焊缝区域标注的焊缝识别模型,实现对管道图像数据中焊缝区域的自动化、标准化的快速处理,替代原有的人工标注流程,节省大量时间和人力成本,并为后续管道图像中的焊接缺陷识别提供高准确率、标准统一的标注焊缝区域的管道图像数据,提高管道图像数据处理的整体效率。通过将焊缝识别模型的前向推理脚本封装为微服务,能够将焊缝识别模型与标注软件结合进行图像与检测结果的交互,提高用户的使用效率。
- 还没有人留言评论。精彩留言会获得点赞!