不动产的三维建模方法、装置、设备及存储介质与流程
本发明属于计算机,具体涉及一种不动产的三维建模方法、装置、设备及存储介质。
背景技术:
1、不动产,是指依自然性质或者法律的规定在空间上占有固定位置,移动后会影响其经济价值的物,包括土地、土地定着物、与土地尚未脱离的土地生成物、因自然或者人力添附于土地并且不能分离的其他物。
2、为了便于对不动产进行建设管理,需要对现有的不动产进行三维建模处理,以使人们能够直观的观察到房屋的结构。
3、相关技术中,在对不动产进行三维建模处理时,多使用无人机对进行拍摄处理,以采集到不动产的图像,再对所采集的图像进行拟合以进行三维建模。
4、在利用无人机进行三维建模时,采集的图像的质量以及数量决定了建模的效果。对于图像的数量,通常是由航向重叠度和旁向重叠度来控制。一般来说,重叠度越高,相邻两张影像上的同名地物点也就越多,匹配的同名点数量也就越多,定位精度也就越高。然而重叠度过高会导致影像的数量增多,对于一些面积比较大的不动产,增加了数据处理的工作量和成本。因此如何合理的设置重叠度是亟待解决的计算问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种不动产的三维建模方法、装置、设备及存储介质,以改善上述问题。
2、为了达到上述目的,本发明提供以下技术方案:
3、一种不动产的三维建模方法,其包括:
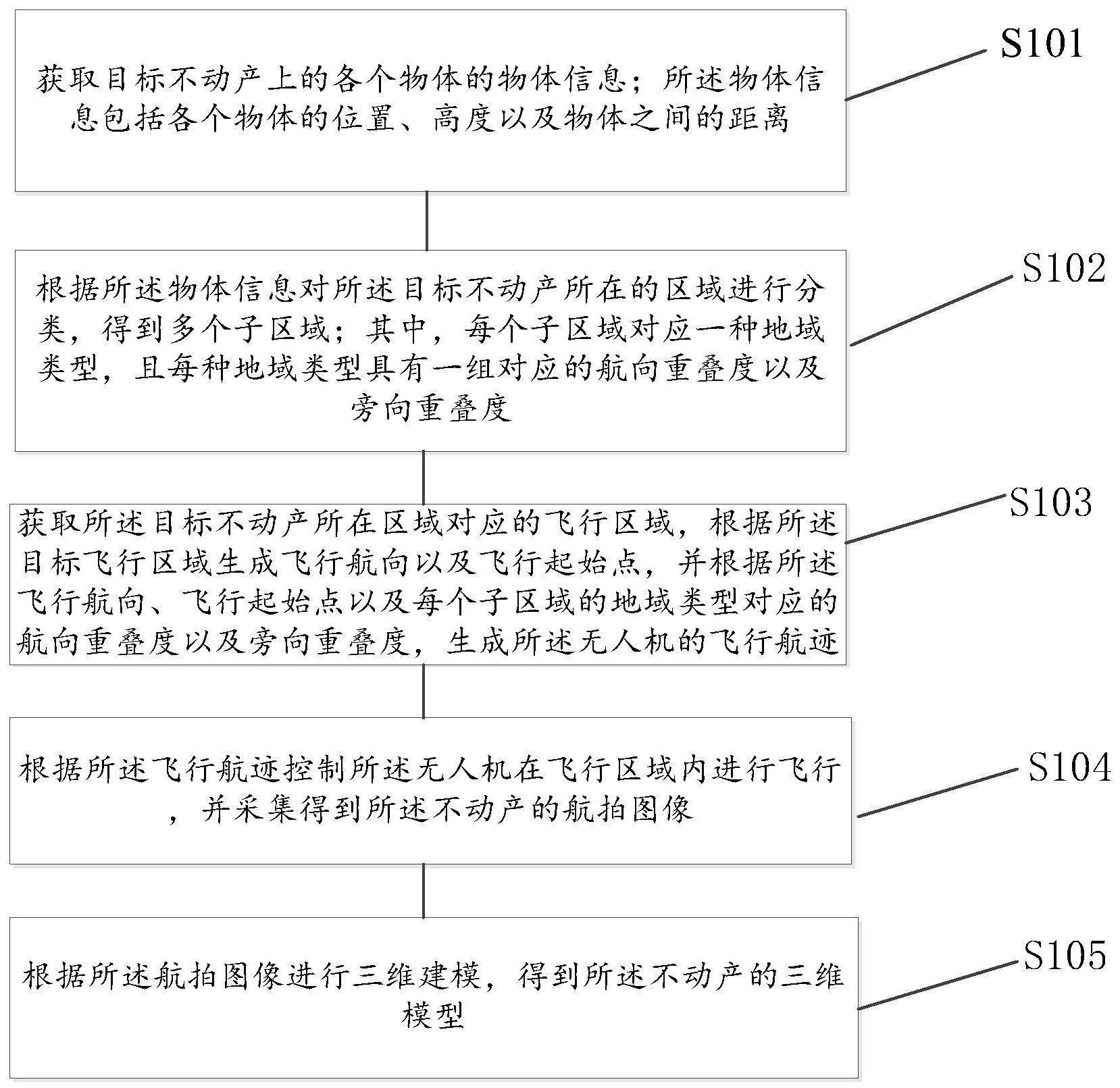
4、获取目标不动产上的各个物体的物体信息;所述物体信息包括各个物体的位置、高度以及物体之间的距离;
5、根据所述物体信息对所述目标不动产所在的区域进行分类,得到多个子区域;其中,每个子区域对应一种地域类型,且每种地域类型具有一组对应的航向重叠度以及旁向重叠度;
6、获取所述目标不动产所在区域对应的飞行区域,根据所述目标飞行区域生成飞行航向以及飞行起始点,并根据所述飞行航向、飞行起始点以及每个子区域的地域类型对应的航向重叠度以及旁向重叠度,生成所述无人机的飞行航迹;
7、根据所述飞行航迹控制所述无人机在飞行区域内进行飞行,并采集得到所述不动产的航拍图像;
8、根据所述航拍图像进行三维建模,得到所述不动产的三维模型。
9、优选地,获取目标不动产上的各个物体的物体信息具体为:
10、读取所述目标不动产的二维设计图档;
11、对所述二维设计图档进行边缘识别,得到多个物体区域以及地面区域;
12、根据所述二维设计图的图档信息,获得每个物体区域的位置、高度以及相邻物体区域之间的距离。
13、优选地,根据所述物体信息对所述目标不动产所在的区域进行分类,得到多个子区域具体包括:
14、根据每个物体区域的高度以及相邻物体区域之间的距离,从满足条件的地面区域中分离出连通区域;所述连通区域为位于两个物体区域之间的地面区域,且满足两个物体区域的高度大于预设的第一高度阈值,距离小于预设的距离阈值;
15、根据物体信息,对所述物体区域、地面区域以及连通区域标记相应的类别,得到多个子区域。
16、优选地,根据物体信息,对所述物体区域、地面区域以及连通区域标记相应的类别,得到多个子区域,具体包括:
17、对所述物体区域,当其高度大于等于预设的第二高度阈值时,将其标记为第一类子区域;当其高度小于所述第二高度阈值时,将其标记为第二类子区域;
18、对所述连通区域,将其标记为第一类子区域;
19、对非连通区域的地面区域,将其标记为第二类子区域。
20、优选地,第一类子区域的对应的航向重叠度以及旁向重叠度大于第二类子区域的对应的航向重叠度以及旁向重叠度。
21、优选地,获取所述目标不动产所在区域对应的飞行区域,根据所述飞行区域生成飞行航向以及飞行起始点,并根据所述飞行航向、飞行起始点以及每个子区域的地域类型对应的航向重叠度以及旁向重叠度,生成所述无人机的飞行航迹具体为:
22、获取所述目标不动产所在区域对应的飞行区域,并将所述飞行区域与所述二维设计图档进行映射,使得二维设计图档上的每个像素点与所述飞行区域上的坐标一一对应;
23、根据所述飞行区域生成飞行航向以及飞行起始点;
24、根据设定的飞行参数模拟无人机在飞行区域内飞行,并获取无人机在飞行过程中的坐标;
25、根据所述坐标获取对应的二维设计图档上的像素点所在的子区域的类型,并获取该类型对应的航向重叠度,以根据所述航向重叠度确定图像采集点,从而得到每条航线的图像采集点;
26、在切换航线时,根据上一航向所经过的子区域的类型确定当前航线的旁向重叠度,并根据所述旁向重叠度确定与上一航向的旁向距离;
27、结合所有的航线获得所述无人机的飞行航迹。
28、优选地,还包括:
29、对当前航线的旁向重叠度,获取其相邻的上一航线所经过的子区域的类型,并将最小类型对应的旁向重叠度作为当前航线的初始旁向重叠度;
30、根据所述初始旁向重叠度生成修正前航线,并获取所述修正前航线所经过的子区域的类型;
31、若修正前航线所经过的子区域对应的最小类型与上一航线所经过的子区域的最小类型相同,则将所述初始旁向重叠度作为当前航线最终的旁向重叠度;
32、否则,将修正前航线所经过的子区域对应的最小类型的旁向重叠度作为当前航线最终的旁向重叠度。
33、本发明实施例还提供了一种不动产的三维建模装置,其包括:
34、物体信息获取单元,用于获取目标不动产上的各个物体的物体信息;所述物体信息包括各个物体的位置、高度以及物体之间的距离;
35、分类单元,用于根据所述物体信息对所述目标不动产所在的区域进行分类,得到多个子区域;其中,每个子区域对应一种地域类型,且每种地域类型具有一组对应的航向重叠度以及旁向重叠度;
36、航迹生成单元,用于获取所述目标不动产所在区域对应的飞行区域,根据所述目标飞行区域生成飞行航向以及飞行起始点,并根据所述飞行航向、飞行起始点以及每个子区域的地域类型对应的航向重叠度以及旁向重叠度,生成所述无人机的飞行航迹;
37、图像采集单元,用于根据所述飞行航迹控制所述无人机在飞行区域内进行飞行,并采集得到所述不动产的航拍图像;
38、建模单元,用于根据所述航拍图像进行三维建模,得到所述不动产的三维模型。
39、本发明实施例还提供了一种不动产的三维建模设备,其包括存储器以及处理器,所述存储器内存储有计算机程序,所述计算机程序能够被所述处理器执行,以实现如上述的不动产的三维建模方法。
40、本发明实施例还提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序能够被所述处理器执行,以实现如上述的不动产的三维建模方法。
41、本实施例通过对目标不动产的不同区域设置不同的类型,且对不同类型的子区域设置不同的航向重叠度以及旁向重叠度,保证了在需要进行密集图像采集时能够采集更多的图像,而在比较开阔的地方采集较少的图像,从而兼顾了最终三维模型的精度以及图像处理的效率。
- 还没有人留言评论。精彩留言会获得点赞!