刀具图像识别方法、装置、计算机设备及存储介质与流程
本发明涉及深度学习,更具体地说是指刀具图像识别方法、装置、计算机设备及存储介质。
背景技术:
1、在产品生产过程中需要使用刀具进行产品的切削,由于工艺需要,一个产品的生产流程中需要多种规格的刀具,但是在目前的流水线上,常采用人工选择刀具安装至机床上对产品进行切削,切削完成后人工归还至指定刀具位置,这种人工选择刀具的方式具有较高的误选概率和管理错乱等问题。
2、现有技术中记载了多种智能刀具管理柜,以解决刀具智能管理的问题。但是,现有智能刀具管理柜一般都是依靠用户借用时输入的刀具信息和预设刀具位置来管理刀具,归还刀具时,用户需根据管理柜的指示将刀具放入指定空间内,再依靠柜体内部的机械分类来完成刀具类型识别和存放,这种刀具识别方式并不智能,很容易出现刀具信息识别不准确而导致分类错误的问题。当然,现有也有采用刀具图像识别技术来实现刀具的识别,进而进行刀具管理的,在刀具图像识别技术中,在已有的卷积神经分类网络中插入注意力模块提升算法的识别效果,已成为重要的研究方式。以coorfinate attention空间注意力模块为例,大致包括以下步骤:对上一层输出的特征图分别进行h维度和w维度的池化,得到c×h×1、c×1×w两特征图;将获得的特征图进行拼接,并使用c×1×1×(c/r)卷积核进行卷积。该步骤目的对空间信息进行编码,并在c通道上进行降维;对上一步骤的输出批归一化处理,并进行split切分,还原为两个支路;两支路各自使用卷积为(c/r)×1×1×c进行卷积学习,输出通道数还原成第一个步骤生成的通道数c;将支路输出进行激活后,把空间信息通过在通道上加权的方式融合。由此可见,第二步骤和第四步骤均使用卷积核为1×1的卷积,主要从通道维度上学习空间信息,没有充分利用w和h两个空间维度上自身维度紧密的关联;而且第二步骤在对w和h空间信息提取共享同一个1×1的卷积核,在各自维度上学习到注意力不够紧密。由于刀具的种类和型号非常多,若采用上述传统注意力机制来识别刀具,识别速度和精度都不高。
3、因此,有必要设计一种新的方法,实现解决其他空间注意力机制模型学习到维度空间信息不够紧密的问题,提高种类和型号多的刀具的识别速度和精度。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供刀具图像识别方法、装置、计算机设备及存储介质。
2、为实现上述目的,本发明采用以下技术方案:刀具图像识别方法,包括:
3、获取待识别图像;
4、将所述待识别图像输入至类型识别模型中进行种类识别,以得到识别结果;
5、其中,所述类型识别模型是通过若干个带有种类标签的刀具图像作为样本集训练卷积神经分类网络所得的,其中,所述类型识别模型包括卷积层、池化层、全连接层以及残差块,在每个卷积层和残差块的后面插入空间注意力模块。
6、其进一步技术方案为:所述将所述待识别图像输入至类型识别模型中进行种类识别,以得到识别结果,包括:
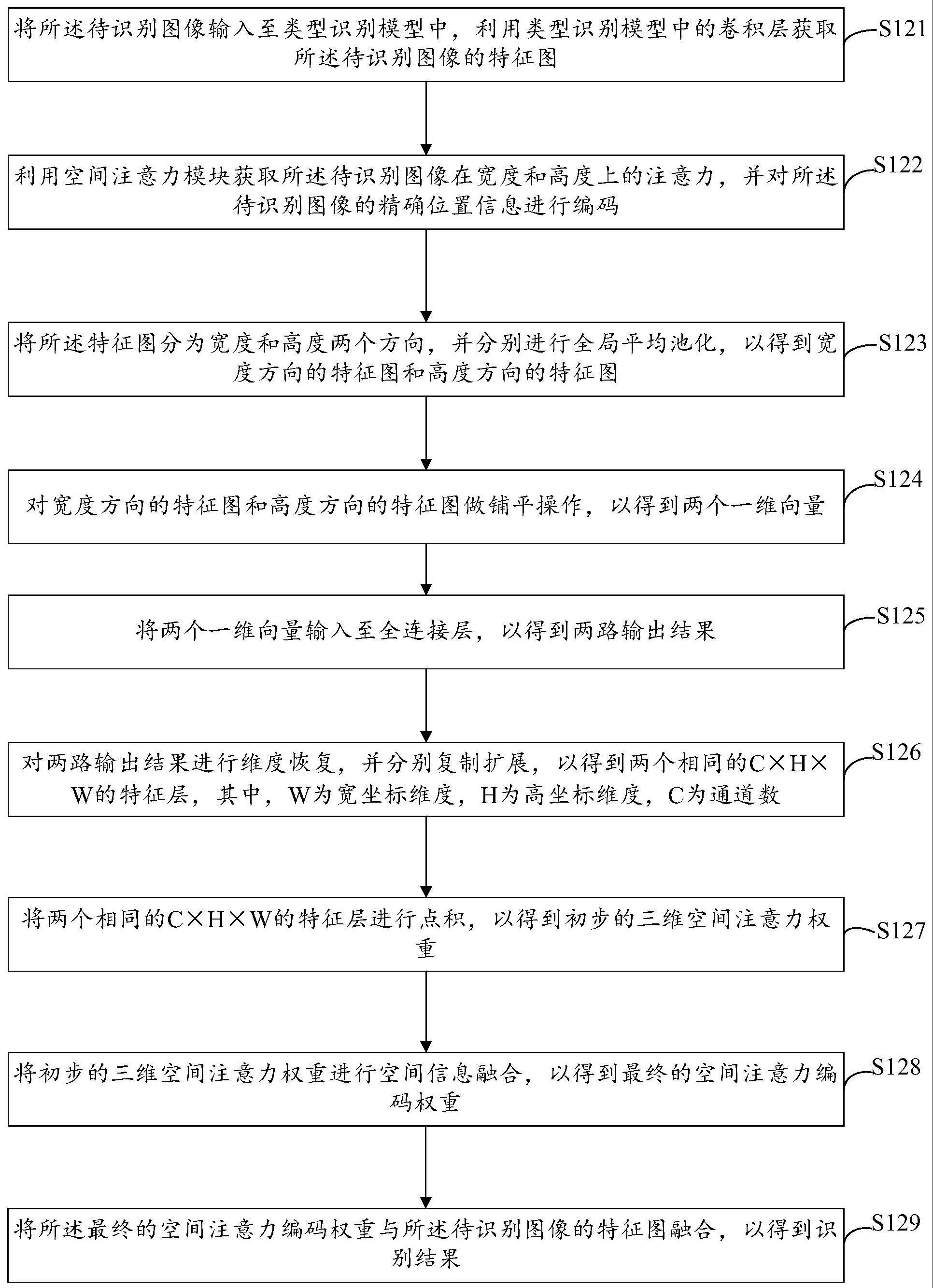
7、将所述待识别图像输入至类型识别模型中,利用类型识别模型中的卷积层获取所述待识别图像的特征图;
8、利用空间注意力模块获取所述待识别图像在宽度和高度上的注意力,并对所述待识别图像的精确位置信息进行编码;
9、将所述特征图分为宽度和高度两个方向,并分别进行全局平均池化,以得到宽度方向的特征图和高度方向的特征图;
10、对宽度方向的特征图和高度方向的特征图做铺平操作,以得到两个一维向量;
11、将两个一维向量输入至全连接层,以得到两路输出结果;
12、对两路输出结果进行维度恢复,并分别复制扩展,以得到两个相同的c×h×w的特征层,其中,w为宽坐标维度,h为高坐标维度,c为通道数;
13、将两个相同的c×h×w的特征层进行点积,以得到初步的三维空间注意力权重;
14、将初步的三维空间注意力权重进行空间信息融合,以得到最终的空间注意力编码权重;
15、将所述最终的空间注意力编码权重与所述待识别图像的特征图融合,以得到识别结果。
16、其进一步技术方案为:所述将两个一维向量输入至全连接层,以得到两路输出结果,包括:
17、将两个一维向量输入至全连接层的bottleneck结构,以得到两路输出结果。
18、其进一步技术方案为:所述两路输出结果为sh=σ(w2relu(w1zh)以及sw=σ(w3relu(w4zw),其中,为h维度方向的第一层全连接层的权重;为h维度方向的第二层全连接层的权重;为w维度方向的第一层全连接层的权重;为w维度方向的第二层全连接层的权重;zh、zw分别为两个一维向量,relu、σ为深度学习的激活函数,第一个全连接的降维系数为r是个超参数,第一个全连接的降维系数采用relu激活;最后一个全连接层恢复c×h×w的维度,在将学习到的特征上做σ激活;w为宽坐标维度,h为高坐标维度,c为通道数。
19、其进一步技术方案为:所述将初步的三维空间注意力权重进行空间信息融合,以得到最终的空间注意力编码权重,包括:
20、使用3×3卷积对初步的三维空间注意力权重进行编码,并使用sigmoid激活,得到最终的空间注意力编码权重。
21、其进一步技术方案为:所述将所述最终的空间注意力编码权重与所述待识别图像的特征图融合,以得到识别结果,包括:
22、将所述最终的空间注意力编码权重与所述待识别图像的特征图进行点乘,以得到识别结果。
23、本发明还提供了刀具图像识别装置,包括:
24、图像获取单元,用于获取待识别图像;
25、识别单元,用于将所述待识别图像输入至类型识别模型中进行种类识别,以得到识别结果;
26、其中,所述类型识别模型是通过若干个带有种类标签的刀具图像作为样本集训练卷积神经分类网络所得的,其中,所述类型识别模型包括卷积层、池化层、全连接层以及残差块,在每个卷积层和残差块的后面插入空间注意力模块。
27、其进一步技术方案为:所述识别单元包括:
28、特征层获取子单元,用于将所述待识别图像输入至类型识别模型中,利用类型识别模型中的卷积层获取所述待识别图像的特征图;
29、编码子单元,用于利用空间注意力模块获取所述待识别图像在宽度和高度上的注意力,并对所述待识别图像的精确位置信息进行编码;
30、池化子单元,用于将所述特征图分为宽度和高度两个方向,并分别进行全局平均池化,以得到宽度方向的特征图和高度方向的特征图;
31、操作子单元,用于对宽度方向的特征图和高度方向的特征图做铺平操作,以得到两个一维向量;
32、全连接子单元,用于将两个一维向量输入至全连接层,以得到两路输出结果;
33、恢复子单元,用于对两路输出结果进行维度恢复,并分别复制扩展,以得到两个相同的c×h×w的特征层,其中,w为宽坐标维度,h为高坐标维度,c为通道数;
34、点积子单元,用于将两个相同的c×h×w的特征层进行点积,以得到初步的三维空间注意力权重;
35、信息融合子单元,用于将初步的三维空间注意力权重进行空间信息融合,以得到最终的空间注意力编码权重;
36、内容融合子单元,用于将所述最终的空间注意力编码权重与所述待识别图像的特征图融合,以得到识别结果。
37、本发明还提供了一种计算机设备,所述计算机设备包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法。
38、本发明还提供了一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时可实现上述的方法。
39、本发明与现有技术相比的有益效果是:本发明通过对待识别图像采用类型识别模型进行种类识别,在识别结果中,类型识别模型在每个卷积层和残差块的后面插入空间注意力模块,对图像宽度和高度上的注意力并对精确位置信息进行编码,并确定在宽度和高度两个方向的特征图,再转为一维向量,再经过全连接层处理后,恢复维度,并确定初步三维空间注意力权重,进而再确定最终的空间注意力编码权重,结合特征图点乘的方式确定识别结果,实现解决其他空间注意力机制模型学习到维度空间信息不够紧密的问题,提高种类和型号多的刀具的识别速度和精度。
40、下面结合附图和具体实施例对本发明作进一步描述。
- 还没有人留言评论。精彩留言会获得点赞!