一种散料仓储的无人天车定位方法、系统及存储介质与流程
本发明涉及无人天车,更具体的,涉及一种散料仓储的无人天车定位方法、系统及存储介质。
背景技术:
1、随着现代科学技术的快速发展和企业生产物流需求的日益增长,提高天车的运行效率,细化天车操作的精准度,已经成为时下迫在眉睫的议题。目前涉及散料的吊运及库区管理业务多采用人工作业的方式,需要大量的人员参与,不仅人工成本较高,而且操作水平参差不齐,安全风险高,生产效率低下。近些年来受到安全、质量、成本等多方面影响,实现库区物流智能化管理变得越来越重要,特别是在一些高危高强度作业区,对无人天车精准作业定位的智能化需求亟待解决。
2、为了使散料仓储的无人天车的定位更加便捷、精细,需要开发一款系统与之配合进行实现,该系统基于天车无人化系统进行作业位置自动识别,从而弥补系统在定位技术的不足,保证各类仓库天车无人化系统顺利实施。作业位置自动识别系统的投入使用,解决料堆定位,缩短了人为操作造成的停机时间、往返路程、搜寻时间,减少了倒库次数,大大降低了人工成本。在该系统的实现过程中,如何对散料仓储的抓取点进行优选,同时如何对抓取点进行精确定位都是亟不可待需要解决的问题。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种散料仓储的无人天车定位方法、系统及存储介质。
2、本发明第一方面提供了一种散料仓储的无人天车定位方法,包括:
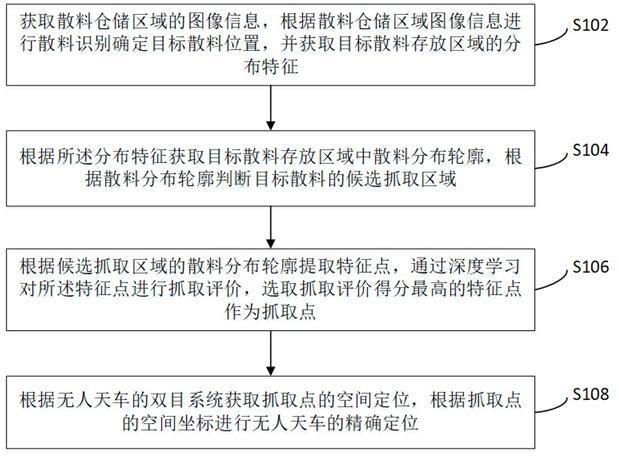
3、获取散料仓储区域的图像信息,根据散料仓储区域图像信息进行散料识别确定目标散料位置,并获取目标散料存放区域的分布特征;
4、根据所述分布特征获取目标散料存放区域中散料分布轮廓,根据散料分布轮廓判断目标散料的候选抓取区域;
5、根据候选抓取区域的散料分布轮廓提取特征点,通过深度学习对所述特征点进行抓取评价,选取抓取评价得分最高的特征点作为抓取点;
6、根据无人天车的双目系统获取抓取点的空间定位,根据抓取点的空间坐标进行无人天车的精确定位。
7、本方案中,获取散料仓储区域的图像信息,根据散料仓储区域图像信息进行散料识别确定目标散料位置,并获取目标散料存放区域的分布特征,具体为:
8、通过散料仓储区域的预设视觉传感器获取散料仓储区域的图像信息,将所述图像信息进行预处理获取散料仓储区域中散料存放区域的颜色特征及纹理特征;
9、构建散料识别模型,利用相关数据库对散料识别模型进行初始化训练,将所述颜色特征及纹理特征输入散料识别模型进行识别,获取散料仓储区域中的目标散料的存放区域;
10、获取目标散料存放区域的图像信息及三维扫描数据,将所述图像信息及三维扫描数据进行联合解算,生成目标散料存放区域的三维点云数据;
11、根据所述三维点云数据获取目标散料存放区域中散料可见部分的分布特征。
12、本方案中,根据所述分布特征获取目标散料存放区域中散料分布轮廓,具体为:
13、根据目标散料存放区域的图像信息进行图像分割获取候选抓取区域的图像,将候选抓取区域的图像进行去噪处理,并通过阈值分割方法对图像进行二值化处理;
14、利用canny算子获取不同角度的二值化图像中的边缘轮廓信息,将不同角度的边缘轮廓信息进行配准拼接;
15、并通过目标散料存放区域的三维点云数据提取候选抓取区域的三维点云数据对拼接后的边缘轮廓信息进行优化,生成候选抓取区域中散料分布轮廓。
16、本方案中,根据散料分布轮廓判断目标散料的候选抓取区域,具体为:
17、根据目标散料存放区域的位置信息对散料仓储区域的抓取进行初步粗定位,获取目标散料存放区域的散料分布轮廓;
18、获取组成散料分布轮廓的若干轮廓线段,获取若干轮廓线段的端点作为轮廓点,对所述轮廓点进行优选,通过优选后的轮廓点对散料分布轮廓进行划分,生成轮廓分段结果;
19、根据轮廓分段结果中各轮廓线段的斜率及与相邻轮廓线段的起伏度获取目标散料存放区域中散料分布轮廓的几何特征;
20、根据所述几何特征对目标散料存放区域进行分区,获取散料分布轮廓中斜率大于预设斜率阈值的轮廓线段,判断该轮廓线段与相邻轮廓线段的起伏度是否为正值且大于预设阈值;
21、若判断起伏度为正值且大于预设阈值时,则将该轮廓线段与相邻轮廓线段所在区域作为目标散料的候选抓取区域;
22、其中,根据目标散料存放区域中散料分布轮廓预设标准线,当相邻轮廓线段位于标准线上方时起伏度为正值,位于标准线下方时起伏度为负值。
23、本方案中,根据候选抓取区域的散料分布轮廓提取特征点,通过深度学习对所述特征点进行抓取评价,选取抓取评价得分最高的特征点作为抓取点,具体为:
24、通过候选抓取区域中的散料分布轮廓获取候选抓取区域中的料位深度,根据所述料位深度信息确定平均料位深度;
25、获取候选抓取区域的散料分布轮廓中斜率变化大于预设斜率变化阈值点作为特征点,获取特征点与平均料位深度的高度差,选取所述高度差大于预设高度差阈值的特征点作为标记特征点;
26、基于神经网络建立抓取点评价模型,将抓取安全性、抓取便捷性及抓取满载率作为评价指标,输入标记特征点与平均料位深度的高度差、标记特征点与邻居特征点之间的距离和高度差及特征点前后轮廓线段的斜率夹角,输出特征点的评价结果;
27、将输入数据进行归一化处理,通过抓取点评价模型获取特征点在各评价指标的得分情况,根据各评价指标的得分情况结合预设权重获取特征点的抓取评价得分;
28、根据评价结果得分对特征点进行排序,选取抓取评价得分最高的特征点作为抓取点。
29、本方案中,根据无人天车的双目系统获取抓取点的空间定位,根据抓取点的空间坐标进行无人天车的精确定位,具体为:
30、对无人天车的双目系统进行标定,同时进行畸变校正,获取左右视觉传感器的内外参数矩阵;
31、获取双目系统中抓取点的左目图像与右目图像,根据所述左目图像与右目图像获取抓取点的图像坐标信息;
32、根据所述内外参数矩阵及双目系统的视差均值通过左边变换将所述图像坐标信息转化为世界坐标信息,根据抓取点的世界坐标信息进行无人天车的精确定位。
33、本发明第二方面还提供了一种散料仓储的无人天车定位系统,该系统包括:存储器、处理器,所述存储器中包括一种散料仓储的无人天车定位方法程序,所述一种散料仓储的无人天车定位方法程序被所述处理器执行时实现如下步骤:
34、获取散料仓储区域的图像信息,根据散料仓储区域图像信息进行散料识别确定目标散料位置,并获取目标散料存放区域的分布特征;
35、根据所述分布特征获取目标散料存放区域中散料分布轮廓,根据散料分布轮廓判断目标散料的候选抓取区域;
36、根据候选抓取区域的散料分布轮廓提取特征点,通过深度学习对所述特征点进行抓取评价,选取抓取评价得分最高的特征点作为抓取点;
37、根据无人天车的双目系统获取抓取点的空间定位,根据抓取点的空间坐标进行无人天车的精确定位。
38、本发明第三方面还提供一种计算机可读存储介质,所述计算机可读存储介质中包括一种散料仓储的无人天车定位方法程序,所述一种散料仓储的无人天车定位方法程序被处理器执行时,实现如上述任一项所述的一种散料仓储的无人天车定位方法的步骤。
39、本发明公开了一种散料仓储的无人天车定位方法、系统及存储介质,包括:获取散料仓储区域的图像信息,根据散料仓储区域图像信息进行散料识别确定目标散料位置,并获取目标散料存放区域的分布特征;根据分布特征获取目标散料存放区域中散料分布轮廓,根据散料分布轮廓判断目标散料的候选抓取区域;根据候选抓取区域的散料分布轮廓提取特征点,通过深度学习对特征点进行抓取评价,选取抓取评价得分最高的特征点作为抓取点,通过双目系统进行抓取点空间定位,根据抓取点的空间坐标进行无人天车的精确定位。本发明通过对散料仓储区域中的抓取位置进行优选,同时对无人天车的抓取点进行精确定位,提高了生产效率,并确保了生产工作的安全稳定性;另外,无人天车作业位置的自动识别,弥补系定位技术的不足,保证散料仓储中天车无人化系统顺利实施。作业位置自动识别系统的投入使用,解决料堆定位,缩短了人为操作造成的停机时间、往返路程、搜寻时间,减少了倒库次数,大大降低了人工成本。
- 还没有人留言评论。精彩留言会获得点赞!