一种物流车辆监控方法及系统与流程
本发明属于物流监测,具体涉及一种物流车辆监控方法及系统。
背景技术:
1、物流车辆监控是利用终端数据采集技术、移动通信技术与互联网技术的结合,把车辆的位置、图像数据反馈给车辆管理人员的显示端,车辆管理人员对车辆的情况进行查看。
2、在物流运输行业,特别是跨多个省市的远距离长途物流运输行业,由于途径多个区域,并在途中经过多次的停车休息以及装卸货物,需要对车厢货物进行实时监控,实现在货物的运输途中,能够及时发现货物丢失或货物被偷盗的现象,保障车厢内货物的安全。
3、而现有物流车辆信息监控一般是针对车辆内部图像进行监视,不能对车辆行驶信息和车辆外部图像进行采集和处理。因此,传统物流车辆已经远远不能满足经济发展对物流运输的要求。
技术实现思路
1、本发明为了解决以上问题,提出了一种物流车辆监控方法及系统。
2、本发明的技术方案是:一种物流车辆监控方法包括以下步骤:
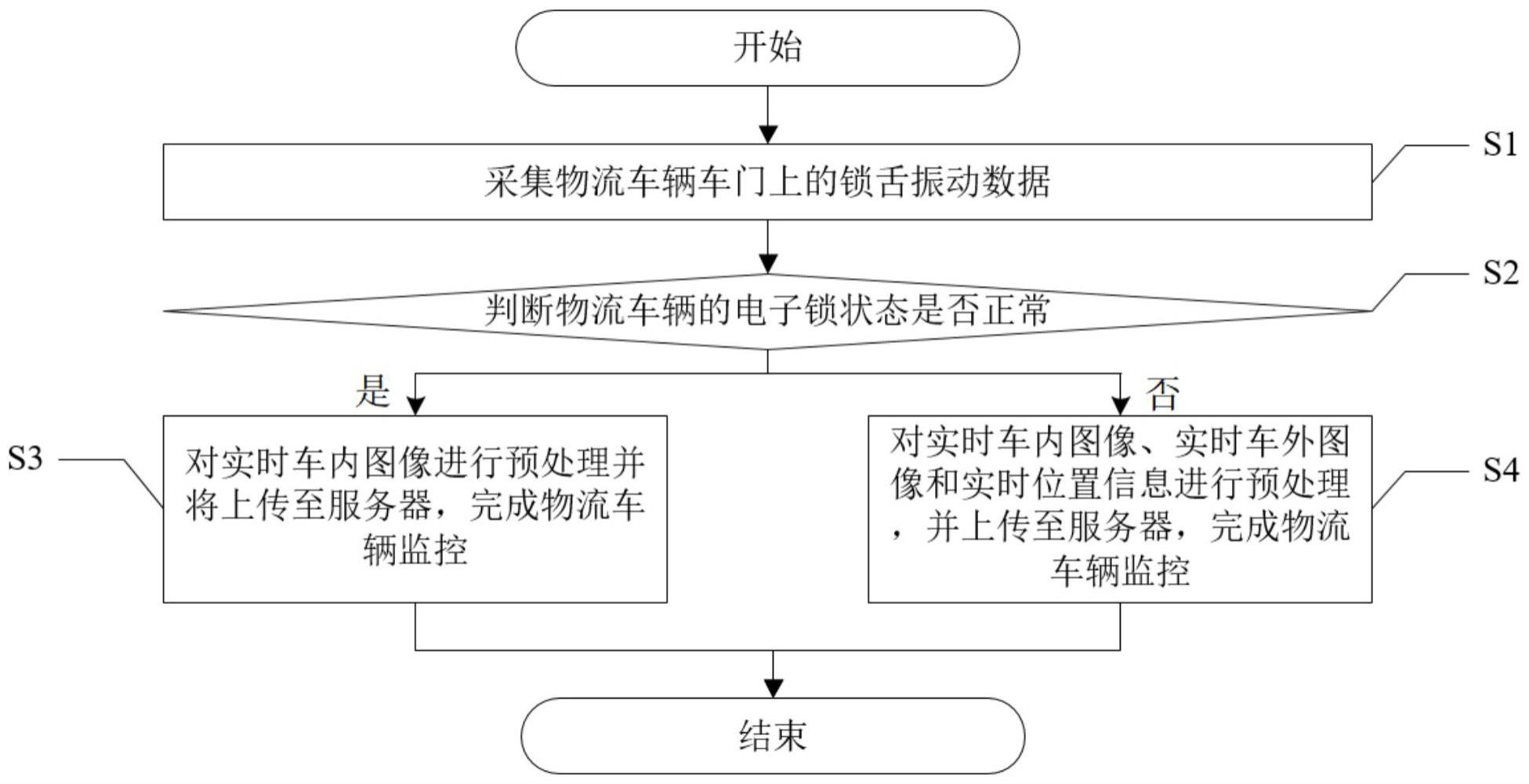
3、s1:采集物流车辆车门上的锁舌振动数据;
4、s2:根据锁舌振动数据判断物流车辆的电子锁状态是否正常,若是则进入步骤s3,否则进入步骤s4;
5、s3:采集物流车辆的实时车内图像,对实时车内图像进行预处理,得到最新车内图像,并将最新车内图像上传至服务器,完成物流车辆监控;
6、s4:采集物流车辆的实时车内图像、实时车外图像和实时位置信息,对实时车内图像、实时车外图像和实时位置信息进行预处理,分别得到最新车内图像、最新车外图像和最新行驶信息,并将最新车内图像、最新车外图像和最新行驶信息上传至服务器,完成物流车辆监控。
7、进一步地,步骤s2包括以下子步骤:
8、s21:在二维坐标系中,以锁舌振动数据的采样时刻作为横坐标,以各个采样时刻的锁舌振动数据作为纵坐标,构建锁舌振动曲线;
9、s22:在锁舌振动曲线中,计算每两个相邻拐点对应的锁舌振动数据的差值,得到振动差值组;
10、s23:利用k均值聚类算法对振动差值组进行聚类操作,生成每一类对应的轮廓系数;
11、s23:根据每一类对应的轮廓系数,计算振动状态系数;
12、s24:判断振动状态系数是否大于或等于设定状态阈值,若是则电子锁状态正常,并进入步骤s3,否则电子锁状态不正常,并进入步骤s4。
13、进一步地,步骤s24中,振动状态系数c的计算公式为:
14、;式中,xmax表示锁舌振动数据的最大值,xmin表示锁舌振动数据的最小值,yn表示第n个拐点与下一个相邻拐点对应的锁舌振动数据的差值,zm表示第m类对应的轮廓系数,ε表示极小值。
15、进一步地,步骤s3和步骤s4中,对实时车内图像进行预处理的方法相同,具体为:对实时车内图像进行平滑处理,并利用图像校正系数对平滑处理后的实时车内图像进行校正。
16、进一步地,图像校正系数d的计算公式为:
17、;式中,表示平滑处理后实时车内图像的亮度均值,m表示平滑处理后实时车内图像的长度,n表示平滑处理后实时车内图像的宽度,g(k)表示平滑处理后的实时车内图像中灰度值为k的像素数量。
18、进一步地,步骤s4中,对实时车外图像进行预处理包括以下子步骤:
19、a41:利用sobel边缘检测算子对实时车外图像进行边缘处理,得到第一车外图像;
20、a42:对第一车外图像进行特征处理,得到第二车外图像;
21、a43:对第二车外图像进行增强处理,得到最新车外图像。
22、进一步地,步骤a42中,对第一车外图像进行特征处理的具体方法为:提取第一车外图像中中心像素点到其余各个像素点的边缘方向,计算各个边缘方向的直线方程,并确定各个直线方程的斜率,生成斜率特征矩阵,根据斜率特征矩阵构建特征处理模型,并利用特征处理模型对第一车外图像进行特征处理,得到第二车外图像;其中,特征处理模型g的表达式为:;式中,h表示斜率特征矩阵,ht表示斜率特征矩阵的转置,λ表示正则化系数,i 表示单位矩阵,表示修正量。
23、进一步地,步骤s4中,对实时位置信息进行预处理包括以下子步骤:
24、b41:根据实时位置信息中各个时刻的gps坐标点,生成物流车辆的当前运输轨迹线;
25、b42:构建轨迹偏差矫正模型;
26、b43:将物流车辆的当前运输轨迹线与标准运输轨迹线输入至轨迹偏差矫正模型中,判断当前运输轨迹线与标准运输轨迹线是否重合,若是则将当前运输轨迹线作为最新行驶信息,并上传至服务器,否则生成误差运输轨迹线,将当前运输轨迹线和误差运输轨迹线作为最新行驶信息,并上传至服务器。
27、进一步地,轨迹偏差矫正模型f的表达式为:
28、;式中,dist(f(α),p)表示标准运输轨迹线中gps横坐标为f(α)与当前运输轨迹线中gps横坐标为p之间的距离,dist(f(β),q)表示标准运输轨迹线中gps纵坐标为f(β)与当前运输轨迹线中gps纵坐标为q之间的距离,p表示当前运输轨迹线中gps横坐标集合,q表示当前运输轨迹线中gps纵坐标集合。
29、本发明的有益效果是:
30、(1)该物流车辆监控方法采集锁舌振动数据,通过锁舌振动数据分析确定电子锁状态,因此可以预先了解物流车辆车厢的安全状况,便于后续步骤采集不同数据,节约算法流程,提高监控效率;
31、(2)该物流车辆监控方法针对不同的电子锁状态,采集不同类型的数据;在电子锁正常时,仅采集并处理车内图像后传输至服务器端,便于运维人员对车内图像进行监控;在电子锁异常时,不仅采集车内图像,还采集车外图像和位置信息,车外图像便于运维人员观察物流车辆车外环境,判断是否有异常情况出现,位置信息便于运维人员观察是否出现路线偏移,及时察觉物流车辆可能存在的安全隐患;
32、(3)该物流车辆监控方法针对昏暗的车内图像进行平滑处理和校正处理,尽量减少车内光源不充足和货物遮挡带来的干扰,保证运维人员接收的图像质量;针对外部环境复杂的车外图像进行边缘处理、特征处理和增强处理,尽量减少车外环境因素带来的干扰,保证上传图像的清晰度;
33、(4)该物流车辆监控方法对物流车辆的实时位置信息进行监测,实现运输路线的有效监控,判断当时运输轨迹线与标准运输轨迹线是否出现偏差,进而反馈至运维人员,进行及时干预,保证驾驶人员的安全驾驶和物流运输效率。
34、基于以上方法,本发明还提出一种物流车辆监控系统,包括振动数据采集单元、电子锁状态生成单元、第一物流车辆监控单元和第二物流车辆监控单元;
35、振动数据采集单元用于采集物流车辆车门上的锁舌振动数据;
36、电子锁状态生成单元用于根据锁舌振动数据确定物流车辆的电子锁状态;
37、第一物流车辆监控单元用于在电子锁状态正常时,采集物流车辆的实时车内图像,对实时车内图像进行预处理,得到最新车内图像,并将最新车内图像上传至服务器,完成物流车辆监控;
38、第二物流车辆监控单元用于在电子锁状态异常时,采集物流车辆的实时车内图像、实时车外图像和实时位置信息,对实时车内图像、实时车外图像和实时位置信息进行预处理,分别得到最新车内图像、最新车外图像和最新行驶信息,并将最新车内图像、最新车外图像和最新行驶信息上传至服务器,完成物流车辆监控。
39、本发明的有益效果是:该物流车辆监控系统通过采集锁舌振动数据确定电子锁状态,并根据电子锁状态采集不同的图像信息和位置信息,完成物流车辆监控。整个监控系统对物流车辆的内外部图像和位置信息进行实时分析,提高了数据的可靠性,便于运维人员查看物流信息,在电子锁异常时,确保物流过程货物状态的实时可控性,进一步提高了货物在物流运输过程中的安全性。
- 还没有人留言评论。精彩留言会获得点赞!