一种路沿线检测方法、装置、电子设备及存储介质与流程
本技术涉及视觉处理,尤其涉及一种路沿线检测方法、装置、电子设备及存储介质。
背景技术:
1、目前,无人摊压机和无人压路机等工程车辆基本实现了自动化施工作业,定位精度约为5cm,但无法精确定位道路边缘处的路沿线进行施工作业。为提高无人摊压机和无人压路机操作简便性及其余路面机械的智能化程度,如何检测路沿线成为了重点研究内容。
2、在现有技术中,通常是基于车载激光雷达,检测道路两侧的路沿石,进而根据路沿石所在位置,确定路沿线。
3、但是,因为施工现场环境复杂多变,且道路两侧可能没有路沿石等明显凸起或凹陷的边界线,导致现有技术无法保证路沿线检测结果的准确性。
技术实现思路
1、本技术提供一种路沿线检测方法、装置、电子设备及存储介质,以解决现有技术无法保证路沿线检测结果的准确性等缺陷。
2、本技术第一个方面提供一种路沿线检测方法,包括:
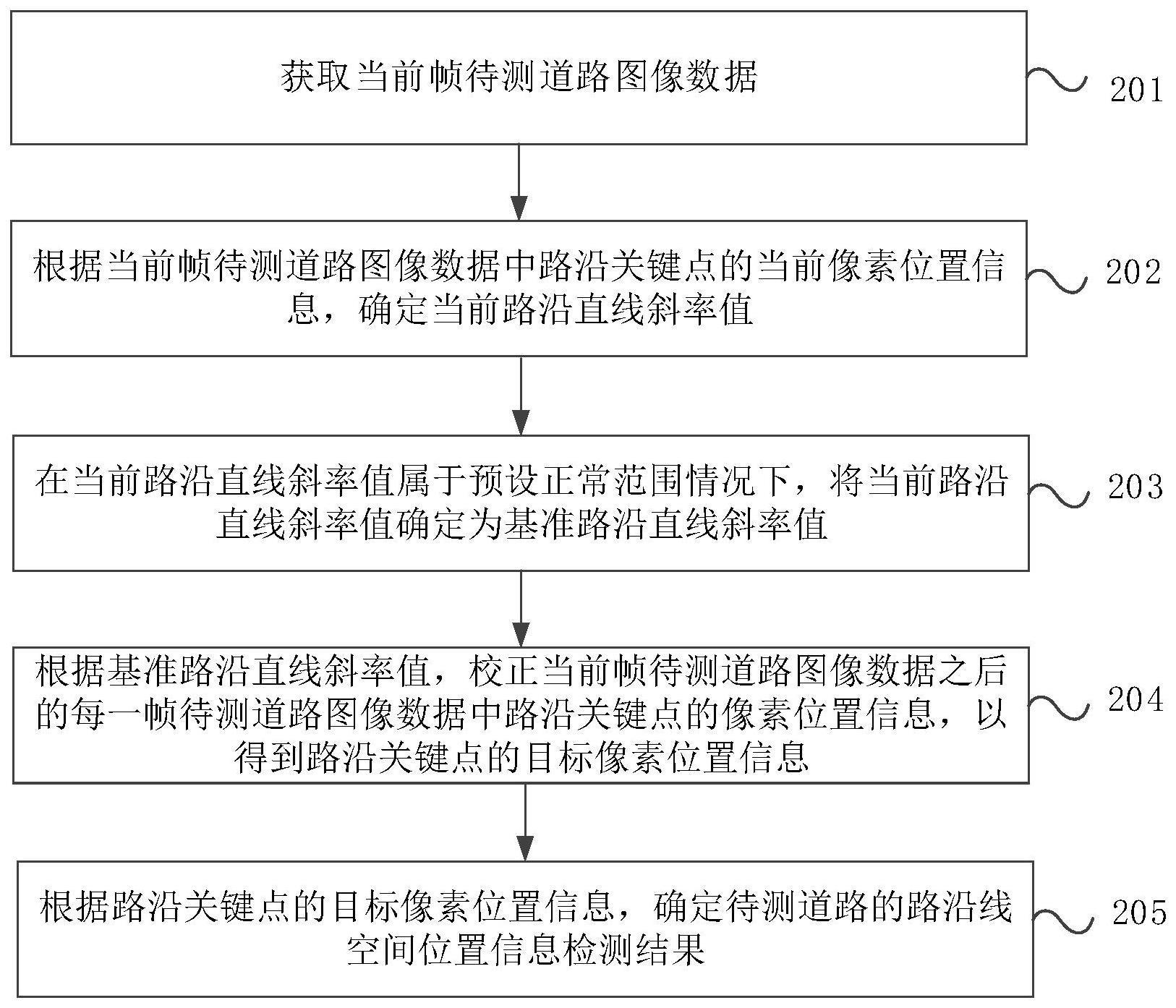
3、获取当前帧待测道路图像数据;
4、根据所述当前帧待测道路图像数据中路沿关键点的当前像素位置信息,确定当前路沿直线斜率值;
5、在所述当前路沿直线斜率值属于预设正常范围情况下,将所述当前路沿直线斜率值确定为基准路沿直线斜率值;
6、根据所述基准路沿直线斜率值,校正所述当前帧待测道路图像数据之后的每一帧待测道路图像数据中路沿关键点的像素位置信息,以得到所述路沿关键点的目标像素位置信息;
7、根据所述路沿关键点的目标像素位置信息,确定所述待测道路的路沿线空间位置信息检测结果。
8、可选的,所述根据所述基准路沿直线斜率值,校正所述当前帧待测道路图像数据之后的每一帧待测道路图像数据中路沿关键点的像素位置信息,以得到所述路沿关键点的目标像素位置信息,包括:
9、根据所述当前帧待测道路图像数据的后一帧待测道路图像数据中路沿关键点的像素位置信息,确定后一帧路沿直线斜率值;
10、在所述后一帧路沿直线斜率值不属于预设正常范围情况下,将所述基准路沿直线斜率值,确定为所述后一帧路沿直线斜率值,以按照所述基准路沿直线斜率值,将后一帧待测道路图像数据中路沿关键点的像素位置信息校正至目标像素位置信息。
11、可选的,还包括:
12、在所述后一帧路沿直线斜率值属于预设正常范围情况下,检测所述后一帧路沿直线斜率值与所述基准路沿直线斜率值之间的直线斜率差值;
13、若所述直线斜率差值小于预设阈值,则将所述后一帧路沿直线斜率值,确定为新的基准路沿直线斜率值。
14、可选的,还包括:
15、若所述直线斜率差值不小于预设阈值,则根据所述当前帧待测道路图像数据的后两帧待测道路图像数据中路沿关键点的像素位置信息,确定后两帧路沿直线斜率值;
16、若所述后两帧路沿直线斜率值与所述基准路沿直线斜率值之间的直线斜率差值不小于所述预设阈值,则确定所述基准路沿直线斜率值异常;
17、将所述后两帧路沿直线斜率值,确定为新的基准路沿直线斜率值。
18、可选的,所述根据所述当前帧待测道路图像数据中路沿关键点的当前像素位置信息,确定当前路沿直线斜率值,包括:
19、对所述当前帧待测道路图像数据进行语义关键点识别,确定待测道路的路沿关键点的当前像素位置信息;
20、根据所述路沿关键点的当前像素位置信息,进行曲线拟合,以确定当前路沿直线斜率值。
21、可选的,所述对所述当前帧待测道路图像数据进行语义关键点识别,确定待测道路的路沿关键点的当前像素位置信息,包括:
22、基于预设语义关键点检测模型,对所述当前帧待测道路图像数据进行语义关键点识别,确定待测道路的路沿关键点的当前像素位置信息。
23、可选的,所述基于预设语义关键点检测模型,对所述当前帧待测道路图像数据进行语义关键点识别,确定待测道路的路沿关键点的当前像素位置信息,包括:
24、对所述当前帧待测道路图像数据进行数据预处理,以在所述当前帧待测道路图像数据中提取目标对象图像数据,并按照所述预设语义关键点检测模型输入要求,对所述目标对象图像数据进行缩放,得到待输入图像数据;
25、将所述待输入图像数据输入至所述预设语义关键点检测模型,以基于所述预设语义关键点检测模型进行语义关键点识别,提取待测道路的路沿关键点,确定所述路沿关键点的当前像素位置信息。
26、本技术第二个方面提供一种路沿线检测装置,包括:
27、获取模块,用于获取当前帧待测道路图像数据;
28、第一确定模块,用于根据所述当前帧待测道路图像数据中路沿关键点的当前像素位置信息,确定当前路沿直线斜率值;
29、第二确定模块,用于在所述当前路沿直线斜率值属于预设正常范围情况下,将所述当前路沿直线斜率值确定为基准路沿直线斜率值;
30、校正模块,用于根据所述基准路沿直线斜率值,校正所述当前帧待测道路图像数据之后的每一帧待测道路图像数据中路沿关键点的像素位置信息,以得到所述路沿关键点的目标像素位置信息;
31、检测模块,用于根据所述路沿关键点的目标像素位置信息,确定所述待测道路的路沿线空间位置信息检测结果。
32、可选的,所述校正模块,具体用于:
33、根据所述当前帧待测道路图像数据的后一帧待测道路图像数据中路沿关键点的像素位置信息,确定后一帧路沿直线斜率值;
34、在所述后一帧路沿直线斜率值不属于预设正常范围情况下,将所述基准路沿直线斜率值,确定为所述后一帧路沿直线斜率值,以按照所述基准路沿直线斜率值,将后一帧待测道路图像数据中路沿关键点的像素位置信息校正至目标像素位置信息。
35、可选的,所述校正模块,还用于:
36、在所述后一帧路沿直线斜率值属于预设正常范围情况下,检测所述后一帧路沿直线斜率值与所述基准路沿直线斜率值之间的直线斜率差值;
37、若所述直线斜率差值小于预设阈值,则将所述后一帧路沿直线斜率值,确定为新的基准路沿直线斜率值。
38、可选的,所述校正模块,还用于:
39、若所述直线斜率差值不小于预设阈值,则根据所述当前帧待测道路图像数据的后两帧待测道路图像数据中路沿关键点的像素位置信息,确定后两帧路沿直线斜率值;
40、若所述后两帧路沿直线斜率值与所述基准路沿直线斜率值之间的直线斜率差值不小于所述预设阈值,则确定所述基准路沿直线斜率值异常;
41、将所述后两帧路沿直线斜率值,确定为新的基准路沿直线斜率值。
42、可选的,所述第一确定模块,具体用于:
43、对所述当前帧待测道路图像数据进行语义关键点识别,确定待测道路的路沿关键点的当前像素位置信息;
44、根据所述路沿关键点的当前像素位置信息,进行曲线拟合,以确定当前路沿直线斜率值。
45、可选的,所述第一确定模块,具体用于:
46、基于预设语义关键点检测模型,对所述当前帧待测道路图像数据进行语义关键点识别,确定待测道路的路沿关键点的当前像素位置信息。
47、可选的,所述第一确定模块,具体用于:
48、对所述当前帧待测道路图像数据进行数据预处理,以在所述当前帧待测道路图像数据中提取目标对象图像数据,并按照所述预设语义关键点检测模型输入要求,对所述目标对象图像数据进行缩放,得到待输入图像数据;
49、将所述待输入图像数据输入至所述预设语义关键点检测模型,以基于所述预设语义关键点检测模型进行语义关键点识别,提取待测道路的路沿关键点,确定所述路沿关键点的当前像素位置信息。
50、本技术第三个方面提供一种电子设备,包括:至少一个处理器和存储器;
51、所述存储器存储计算机执行指令;
52、所述至少一个处理器执行所述存储器存储的计算机执行指令,使得所述至少一个处理器执行如上第一个方面以及第一个方面各种可能的设计所述的方法。
53、本技术第四个方面提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现如上第一个方面以及第一个方面各种可能的设计所述的方法。
54、本技术技术方案,具有如下优点:
55、本技术提供一种路沿线检测方法、装置、电子设备及存储介质,该方法包括:获取当前帧待测道路图像数据;根据当前帧待测道路图像数据中路沿关键点的当前像素位置信息,确定当前路沿直线斜率值;在当前路沿直线斜率值属于预设正常范围情况下,将当前路沿直线斜率值确定为基准路沿直线斜率值;根据基准路沿直线斜率值,校正当前帧待测道路图像数据之后的每一帧待测道路图像数据中路沿关键点的像素位置信息,以得到路沿关键点的目标像素位置信息;根据路沿关键点的目标像素位置信息,确定待测道路的路沿线空间位置信息检测结果。上述方案提供的方法,通过识别当前帧待测道路图像数据中路沿关键点的当前像素位置信息,并依据基准路沿直线斜率值和前后帧图像数据的直线斜率值变化特征,校正路沿关键点的像素位置信息,保证了最终得到的路沿线空间位置信息检测结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!