实景三维模型裁切方法、装置、设备及存储介质与流程
本发明涉及模型处理,尤其涉及一种实景三维模型裁切方法、装置、设备及存储介质。
背景技术:
1、如今,得益于软硬件设备的飞速发展,实景三维模型的生产和应用(如地理信息测绘、数字乡村、自然资源遥感检测等)越来越广泛。例如,当用户需要对某个乡村的地理信息(如地形地貌、植被分布等)进行勘测,则可以通过建立该乡村对应的实景三维模型来实现数字化勘测。随着实景三维中国建设的稳步推进,针对模型的处理的需求也日益增多,而实景三维模型的裁切是其中的一个基础和重要的内容。
2、目前行业内通常通过传统的几何拓扑运算的方法来对实景三维模型对应的二维空间进行交、差、并、补等操作,从而实现对实景三维模型的裁切。然而这种方法需要将实景三维模型对应的模型三角网投影到二维空间进行运算,其运算过程较为复杂且误差较大。因此,目前行业内亟需一种能够快速、准确地对实景三维模型进行裁切的方法。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种实景三维模型裁切方法、装置、设备及存储介质,旨在解决现有技术无法快速、准确地对实景三维模型进行裁切的技术问题。
2、为实现上述目的,本发明提供了一种实景三维模型裁切方法,所述方法包括以下步骤:
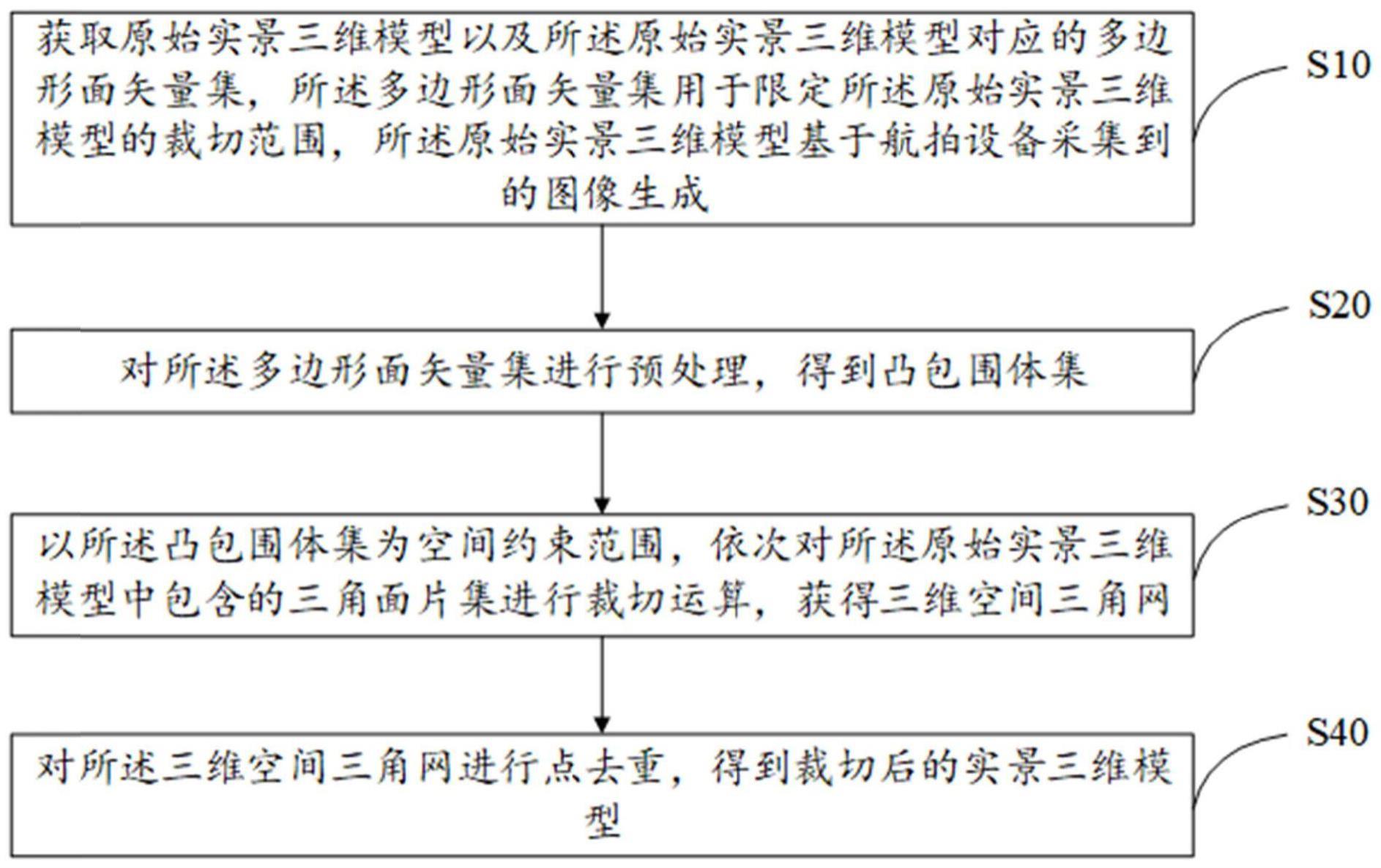
3、获取原始实景三维模型以及所述原始实景三维模型对应的多边形面矢量集,所述多边形面矢量集用于限定所述原始实景三维模型的裁切范围,所述原始实景三维模型基于航拍设备采集到的图像生成;
4、对所述多边形面矢量集进行预处理,得到凸包围体集;
5、以所述凸包围体集为空间约束范围,依次对所述原始实景三维模型中包含的三角面片集进行裁切运算,获得三维空间三角网;
6、对所述三维空间三角网进行点去重,得到裁切后的实景三维模型。
7、可选地,所述对所述多边形面矢量集进行预处理,得到凸包围体集的步骤,包括:
8、对所述多边形面矢量集中的各多边形面矢量进行三角化,得到凸多边形集;
9、沿预设方向对所述凸多边形集中各凸多边形的每条边进行拉伸,得到凸多边形平面集;
10、以所述原始实景三维模型的裁切范围为阈值范围,从所述凸多边形平面集中选取凸包围体集。
11、可选地,所述以所述凸包围体集为空间约束范围,依次对所述原始实景三维模型中包含的三角面片集进行裁切运算,获得三维空间三角网的步骤,包括:
12、以所述凸包围体集为空间约束范围,确定所述凸包围体集与所述原始实景三维模型中包含的三角面片集的总相交部分;
13、根据所述总相交部分对所述三角面片集进行裁切运算,得到若干裁切后的三角面片;
14、将所述若干裁切后的三角面片进行组合,获得三维空间三角网。
15、可选地,所述凸包围体集与所述原始实景三维模型中包含的三角面片集呈一一对应关系,所述以所述凸包围体集为空间约束范围,确定所述凸包围体集与所述原始实景三维模型中包含的三角面片集的总相交部分的步骤,包括:
16、遍历所述凸包围体集与所述三角面片集,并基于遍历到的凸包围体对应的平面以及遍历到的三角面片对应的顶点,得到若干子相交部分;
17、将所述若干子相交部分进行组合,以所述凸包围体集为空间约束范围,确定所述凸包围体集与所述原始实景三维模型中包含的三角面片集的总相交部分。
18、可选地,所述基于遍历到的凸包围体对应的平面以及遍历到的三角面片对应的顶点,得到若干子相交部分的步骤,包括:
19、根据遍历到的凸包围体对应的平面以及遍历到的三角面片对应的顶点得到若干裁切点集;
20、将所述若干裁切点集中点的个数大于或等于预设数值的裁切点集设为相交点集,并基于所述相交点集得到若干子相交部分。
21、可选地,所述根据遍历到的凸包围体对应的平面以及遍历到的三角面片对应的顶点得到若干裁切点集的步骤,包括:
22、将遍历到的三角面片对应的顶点按逆时针序列进行排序,得到若干顶点集合;
23、基于所述若干顶点集合与遍历到的凸包围体对应的平面进行计算得到若干裁切点集;
24、相应地,所述若干裁切点集中每一个裁切点集的计算步骤包括:
25、设遍历到的当前凸包围体对应的平面为平面plk,遍历到的当前三角面片对应的顶点集合为点集v,其中,vp为所述点集v中的第一个点,vc为所述点集v中除所述vp以外的任意一个点;
26、若所述点集v中不存在与所述vp坐标一致的其他点,则计算所述vp与所述平面plk的距离dp以及所述vc与所述平面plk的距离dc;
27、当dp≥0时,将所述vp添加至裁切点集中;
28、当dp*dc<0时,计算线段与所述平面plk的交点,并将所述交点添加至所述裁切点集中。
29、可选地,所述对所述三维空间三角网进行点去重,得到裁切后的实景三维模型的步骤,包括:
30、获取所述三维空间三角网中各交点的三维空间坐标以及各交点对应的点属性,所述点属性包括纹理坐标、法向和颜色数组;
31、基于所述三维空间坐标以及所述点属性判断所述三维空间三角网中是否存在重复点;
32、若是,则对所述重复点进行点去重,得到裁切后的实景三维模型。
33、此外,为实现上述目的,本发明还提出一种实景三维模型裁切装置,所述实景三维模型裁切装置包括:
34、范围限定模块,用于获取原始实景三维模型以及所述原始实景三维模型对应的多边形面矢量集,所述多边形面矢量集用于限定所述原始实景三维模型的裁切范围,所述原始实景三维模型基于航拍设备采集到的图像生成;
35、预处理模块,用于对所述多边形面矢量集进行预处理,得到凸包围体集;
36、模型裁切模块,用于以所述凸包围体集为空间约束范围,依次对所述原始实景三维模型中包含的三角面片集进行裁切运算,获得三维空间三角网;
37、后处理模块,用于对所述三维空间三角网进行点去重,得到裁切后的实景三维模型。
38、此外,为实现上述目的,本发明还提出一种实景三维模型裁切设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的实景三维模型裁切程序,所述实景三维模型裁切程序配置为实现如上文所述的实景三维模型裁切方法的步骤。
39、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有实景三维模型裁切程序,所述实景三维模型裁切程序被处理器执行时实现如上文所述的实景三维模型裁切方法的步骤。
40、本发明通过获取原始实景三维模型以及原始实景三维模型对应的多边形面矢量集,多边形面矢量集用于限定原始实景三维模型的裁切范围,原始实景三维模型基于航拍设备采集到的图像生成;对多边形面矢量集进行预处理,得到凸包围体集;以凸包围体集为空间约束范围,依次对原始实景三维模型中包含的三角面片集进行裁切运算,获得三维空间三角网;对三维空间三角网进行点去重,得到裁切后的实景三维模型。相比于现有技术通过传统的二维拓扑运算对实景三维模型进行裁切,由于本发明上述方法以凸包围体集为空间约束范围,对原始实景三维模型中包含的三角面片逐个进行裁切运算,同时在裁切运算的过程中对新产生的点进行去重操作,从而避免了现有的实景三维模型裁切方法中需将实景三维模型三角面片投影到二维平面上进行拓扑运算所导致的运算效率低的问题,进而能够快速、准确地得到裁切后的实景三维模型。
- 还没有人留言评论。精彩留言会获得点赞!