VideoSAR阴影跟踪方法、系统、装置及存储介质
本发明涉及阴影跟踪,尤其是一种videosar阴影跟踪方法、系统、装置及存储介质。
背景技术:
1、videosar技术首先由美国的sandia国家实验室在2003年提出。比起光学成像,sar成像技术有全天候、全天时的工作特点优势,在雾霾、沙尘、云雾中依然能够提供高分辨率的成像结果。但是,由于过于长的积累时间,sar成像往往只能生成静态的单幅图像,限制了其所能发挥的作用。videosar作为一种新的雷达成像手段,突破了传统sar成像帧率偏低问题,能够实现动态且实时的针对目标区域的监测。此外,videosar采用毫米波以上的频段进行工作,通过集成在如无人机等小型飞行平台,适应现代战场向智能化、小型化发展的趋势。综上,videosar成像技术采用较高雷达波段工作,突破传统高分辨合成孔径雷达成像帧率偏低问题,顺应现代战场智能化的发展趋势和雷达系统化全流程化的发展要求,针对精确制导,快速定位,识别威胁目标有深远影响。
2、目标阴影是目前videosar目标跟踪和检测研究中的重要切入点。目标阴影产生于目标能量偏移之后的区域,能够反映目标位置和大致形状,具备不依赖目标本身的雷达截面积以及不存在盲速和最小检测速度的优点。但是现有的videosar阴影跟踪方法依然存在一些问题。对于将阴影看做点目标的跟踪跟踪方法,复杂的背景杂波和噪声会产生虚警,影响检测和跟踪的处理难度和精度。对于使用外貌特征跟踪的阴影跟踪方法,强散射杂波旁瓣会对阴影产生遮挡,自身能量和其他目标散焦能量会对阴影进行干扰,快速运动会导致阴影模糊,以上提到的问题都会导致跟踪算法外貌模板的退化和污染。
技术实现思路
1、有鉴于此,本发明实施例提供一种videosar阴影跟踪方法、系统、装置及存储介质,能够高效准确实现videosar阴影跟踪。
2、一方面,本发明的实施例提供了一种videosar阴影跟踪方法,包括:
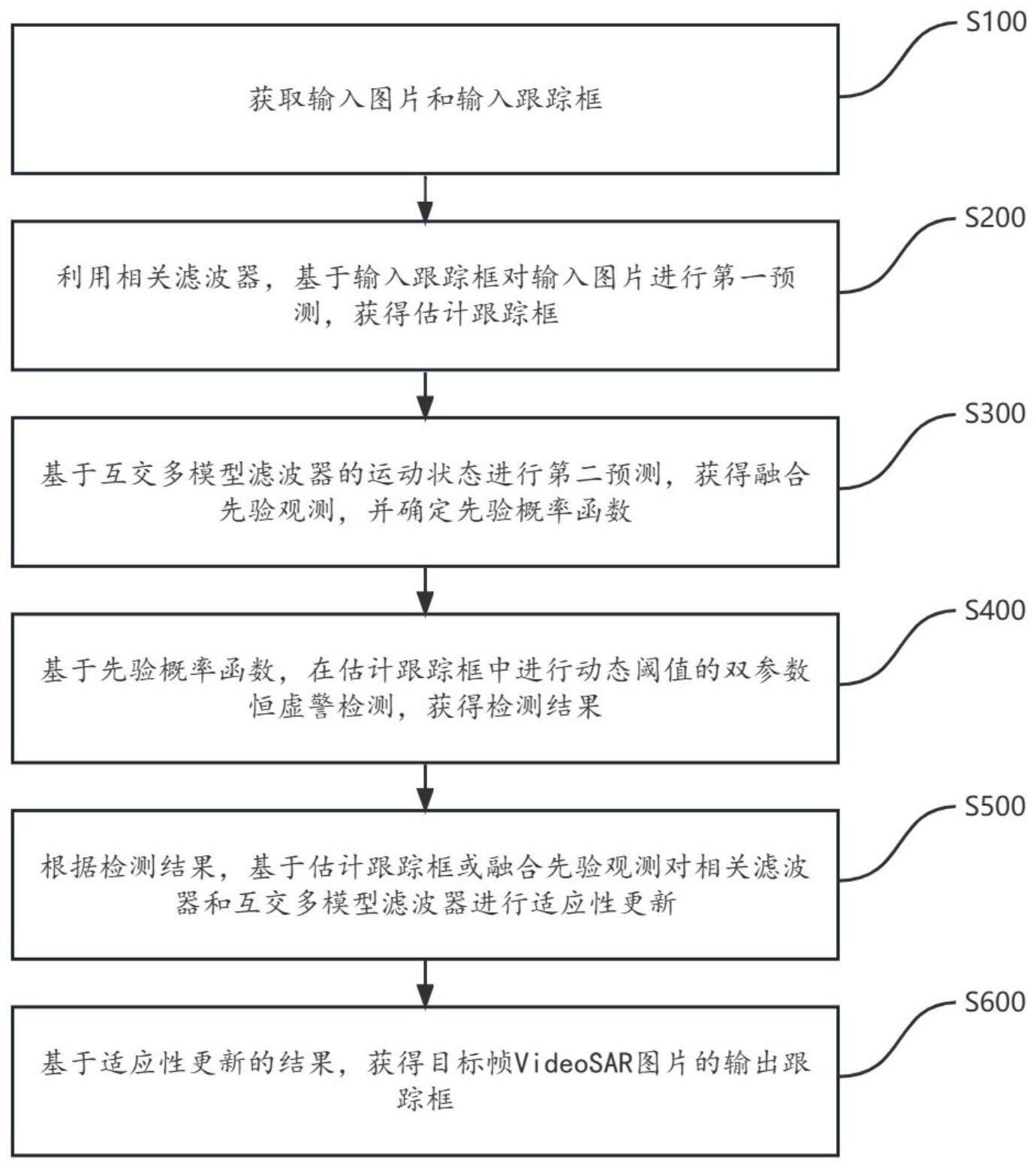
3、获取输入图片和输入跟踪框;其中,输入图片表征videosar视频帧序列中的目标帧videosar图片,输入跟踪框表针基于目标帧前一帧的videosar图片得到的输出跟踪框;
4、利用相关滤波器,基于输入跟踪框对输入图片进行第一预测,获得估计跟踪框;其中,相关滤波器包括进行位移估计的二维滤波器和进行尺度估计的一维滤波器;
5、基于互交多模型滤波器的运动状态进行第二预测,获得融合先验观测,并确定先验概率函数;
6、基于先验概率函数,在估计跟踪框中进行动态阈值的双参数恒虚警检测,获得检测结果;检测结果包括估计跟踪框中检测到目标和估计跟踪框中没有检测到目标;
7、根据检测结果,基于估计跟踪框或融合先验观测对相关滤波器和互交多模型滤波器进行适应性更新:
8、基于适应性更新的结果,获得目标帧videosar图片的输出跟踪框。
9、可选地,方法还包括:
10、通过最小化损失函数,优化二维滤波器;
11、其中,最小化损失函数的表达式为:
12、
13、式中,ε表示最小化损失函数,l表示特征的层级索引,d表示特征的总层数,*表示相关操作,f表示提取目标的特征,g表示高斯函数,λ表示正则化影响参数,h表示二维滤波器。
14、可选地,利用相关滤波器,基于输入跟踪框对输入图片进行第一预测,获得估计跟踪框,包括:
15、利用相关滤波器提取输入图片的目标特征;其中,目标特征包括梯度方向直方图特征和像素强度特征;
16、基于目标特征确定二维滤波器的离散傅里叶变换;其中,二维滤波器的离散傅里叶变换的表达式为:
17、
18、式中,h表示二维滤波器的离散傅里叶变换,l和k表示特征的层级索引,d表示特征的总层数,g表示高斯函数离散傅里叶变换,f表示特征的离散傅里叶变换,λ表示正则化影响参数,上标-表示复共轭;
19、通过提取输入跟踪框的特征图,并结合二维滤波器的离散傅里叶变换确定结果分数,获得估计跟踪框;其中,结果分数的表达式为:
20、
21、式中,y表示结果分数吗,表示逆离散傅里叶变换,l表示特征的层级索引,d表示特征的总层数,al表示二维滤波器的离散傅里叶变换的分子,b表示二维滤波器的离散傅里叶变换的分子的分母,上标-表示复共轭,λ表示正则化影响参数。
22、可选地,基于互交多模型滤波器的运动状态进行第二预测,获得融合先验观测,并确定先验概率函数,包括:
23、通过互交多模型滤波器交互各个不同运动模型滤波器的状态,确定不同运动状态的卡尔曼滤波器的融合状态和融合协方差以及运动状态概率;
24、根据融合状态、融合协方差和运动状态概率,获得融合先验观测,并确定先验概率函数。
25、可选地,根据融合状态、融合协方差和运动状态概率,获得融合先验观测,并确定先验概率函数,包括:
26、根据融合状态、融合协方差和运动状态概率,获得融合先验目标状态;
27、根据融合先验目标状态,结合观测矩阵获得融合先验观测;
28、根据融合先验观测,结合高斯密度函数和观测新息协方差确定先验概率函数;其中,观测新息协方差通过各个不同运动模型中运动状态概率最高的运动模型得到;先验概率函数的表达式为:
29、
30、式中,p(x,y)表示先验概率函数,x,y表示函数的引用变量,表示高斯密度函数,z(k|k-1)表示融合先验观测,s(k)表示观测新息协方差。
31、可选地,根据检测结果,基于估计跟踪框或融合先验观测对相关滤波器和互交多模型滤波器进行适应性更新,包括:
32、当估计跟踪框中检测到目标,对互交多模型滤波器使用估计跟踪框进行更新,并对相关滤波器使用互交多模型滤波器的运动状态的融合结果进行更新;
33、当估计跟踪框中没有检测到目标,对互交多模型滤波器使用融合先验观测进行更新,并对相关滤波器的估计跟踪框更改位置且不进行更新。
34、可选地,方法还包括:
35、通过先验概率函数与搜索策略相结合,对丢失目标进行重新跟踪,并对跟踪框以固定增益增加平行于道路的过程噪声;其中,过程噪声的表达式为:
36、σ|=gnlost·σ
37、式中,σ|表示过程噪声,g表示固定增益,nlost表示双参数恒虚警检测持续未能检测到目标的帧数,σ表示基于双参数恒虚警检测的标准差。
38、另一方面,本发明的实施例提供了一种videosar阴影跟踪系统,包括:
39、第一模块,用于获取输入图片和输入跟踪框;其中,输入图片表征videosar视频帧序列中的目标帧videosar图片,输入跟踪框表针基于目标帧前一帧的videosar图片得到的输出跟踪框;
40、第二模块,用于利用相关滤波器,基于输入跟踪框对输入图片进行第一预测,获得估计跟踪框;其中,相关滤波器包括进行位移估计的二维滤波器和进行尺度估计的一维滤波器;
41、第三模块,用于基于互交多模型滤波器的运动状态进行第二预测,获得融合先验观测,并确定先验概率函数;
42、第四模块,用于基于先验概率函数,在估计跟踪框中进行动态阈值的双参数恒虚警检测,获得检测结果;检测结果包括估计跟踪框中检测到目标和估计跟踪框中没有检测到目标;
43、第五模块,用于根据检测结果,基于估计跟踪框或融合先验观测对相关滤波器和互交多模型滤波器进行适应性更新;
44、第六模块,用于基于适应性更新的结果,获得目标帧videosar图片的输出跟踪框。
45、另一方面,本发明的实施例提供了一种videosar阴影跟踪装置,包括处理器以及存储器;
46、存储器用于存储程序;
47、处理器执行程序实现如前面的方法。
48、另一方面,本发明的实施例提供了一种计算机可读存储介质,存储介质存储有程序,程序被处理器执行实现如前面的方法。
49、本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
50、本发明实施例首先获取输入图片和输入跟踪框;其中,输入图片表征videosar视频帧序列中的目标帧videosar图片,输入跟踪框表针基于目标帧前一帧的videosar图片得到的输出跟踪框;利用相关滤波器,基于输入跟踪框对输入图片进行第一预测,获得估计跟踪框;其中,相关滤波器包括进行位移估计的二维滤波器和进行尺度估计的一维滤波器;基于互交多模型滤波器的运动状态进行第二预测,获得融合先验观测,并确定先验概率函数;基于先验概率函数,在估计跟踪框中进行动态阈值的双参数恒虚警检测,获得检测结果;检测结果包括估计跟踪框中检测到目标和估计跟踪框中没有检测到目标;根据检测结果,基于估计跟踪框或融合先验观测对相关滤波器和互交多模型滤波器进行适应性更新;基于适应性更新的结果,获得目标帧videosar图片的输出跟踪框。本发明实施例通过结合相关滤波器和互交多模型滤波器实现跟踪框架,基于互交多模型滤波器为跟踪补充了运动信息,解决外貌模板退化和污染问题,并基于动态阈值的双参数恒虚警检测,降低了虚警干扰的影响。本发明实施例能够解决现有同类技术方案的不足,高效准确地完成videosar目标跟踪任务。
- 还没有人留言评论。精彩留言会获得点赞!