一种知识驱动的空间目标态势感知方法及系统
本发明属于目标检测、空间态势感知领域,尤其涉及一种知识驱动的空间目标态势感知方法及系统。
背景技术:
1、全球航天发射数量有逐年递增的趋势且增速较快。随着越来越多的航天器被送入太空,各种各样的碎片垃圾也会随之增加,轨道资源日益拥挤,严重威胁了在轨航天器的安全。
2、为了应对潜在的威胁,部分国家已经建立了空间态势感知系统(ssa),空间态势感知主要包括对空间目标的探测、跟踪、识别以及对空间事件的评估、核实与环境监测预报,是应对空间威胁、确保空间安全的重要基石。空间目标包括:人造航天器、空间碎片和小行星。常见的空间态势感知系统主要分为地基空间态势感知系统和天基空间态势感知系统两种,地基空间态势感知系统主要由地基光电探测器、雷达探测器等组成,具有技术成熟、造价相对较低、使用及维护方便等优势,但由于受气象条件、地理位置等因素的限制,在对目标的监测范围、时效性等方面仍存在诸多局限。天基空间态势感知系统通过安装在卫星平台上的成像测量装置,对目标进行检测跟踪,具有不受天气影响、灵活性高等优势,是现阶段的主流空间态势感知系统。
3、天基态势感知系统的主要工作就是对空间目标进行探测、跟踪、识别,确定目标的形状、尺寸、运动状态等信息,因此一直以来评价天基态势感知系统性能的主要指标是其空间目标检测能力。但是随着空间目标数量的增加,也对天基空间态势感知系统的实时检测能力和检测精确度提出了更高的要求。我国对天基空间态势感知系统的研究开展较晚,在目标检测、识别和数据实时处理等技术与国外存在较大差距。随着其他国家研制的天基态势感知系统数量越来越多,天基空间态势感知系统所能获取到的信息近乎饱和,单纯依靠传统目标检测方法进行态势感知系统的研究无法体现出其能力的优越性。同时,天基空间态势感知系统的数据传输能力往往与其数据生成能力不匹配,很难将拍摄的海量数据实时传回到地面系统,难以完成星上在线检测等应用,需要知识为在线监测提供支撑。因此,对知识驱动的空间目标态势感知方法进行深入研究,具有一定创新性。
技术实现思路
1、现有技术空间态势感知系统存在的技术缺陷有:1.暗弱空间目标检测难题;2.空间目标编目难题;3.在线检测和实时处理难题。本发明的目的在于克服上述技术缺陷,提出了一种知识驱动的空间目标态势感知方法。
2、为了实现上述目的,本发明提出了一种知识驱动的空间目标态势感知方法,所述方法包括:
3、步骤1)将采集的一组星空场景图像序列输入预先建立和训练好的目标检测模型进行识别,得到检测结果;
4、步骤2)根据检测结果提取待判断目标对应的观测信息,对已建立的空间目标态势感知知识库进行更新和补充;
5、步骤3)对于待判断目标,结合空间目标态势感知知识库,通过轨迹预报值对比和光度曲线对比,判断是否为新目标;
6、所述目标检测模型为改进的u-net语义分割网络。
7、作为上述方法的一种改进,所述方法还包括:空间目标态势感知知识库的建立步骤;具体包括:
8、从现有立项文档、相关论文以及空间目标库中获取态势感知相关语料,构建空间目标态势感知语料库,从中提取相关知识并转换为结构化知识;
9、采用自底向上的方法构建态势感知系统知识图谱和态势感知对象知识图谱,共同构成空间目标态势感知知识库。
10、作为上述方法的一种改进,所述相关知识包括态势感知系统相关知识和态势感知对象相关知识;其中,
11、所述态势感知系统相关知识包括:系统类型、所属国家、卫星所处轨道、探测器类型、探测器口径、探测帧频、理论最高探测星等、图像分辨率和视场大小;
12、所述态势感知对象相关知识包括先验知识和观测信息,其中,
13、所述先验知识包括轨道信息、所属任务、目标种类、目标功能和威胁等级;
14、观测信息包括:目标灰度值、光度曲线、像面运动轨迹和运动速度。
15、作为上述方法的一种改进,所述态势感知系统知识图谱和态势感知对象知识图谱均具有节点集合f,所述节点集合f包括实体集合a、关系集合b和属性集合c;其中,
16、所述实体集合a包括:态势感知对象、态势感知系统、所属国家、航天任务、探测卫星和探测载荷;
17、所述关系集合b包括:属于、竞争、合作、探测和组网;
18、所述属性集合c包括:轨道信息、目标类型、功能、异动情况、像面轨迹、威胁等级、灰度值、光度曲线、速度、加速度;系统类型、卫星数量;任务类型、开始时间、卫星数量;轨道信息、载荷;探测器类型、口径、图像分辨率、极限探测能力、探测帧频和视场大小;
19、知识图谱的关系包括某两个实体间的直接关系以及实体和属性间的关系。
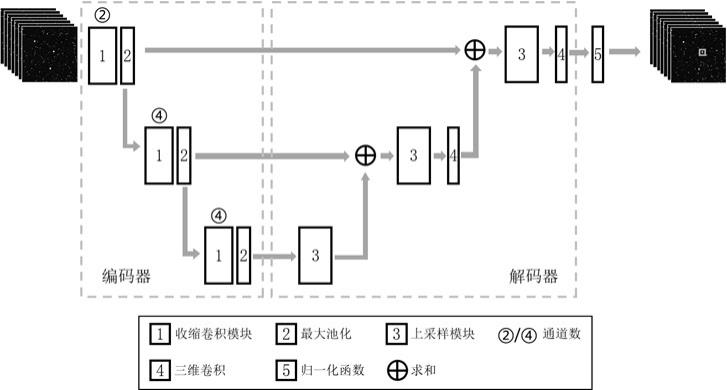
20、作为上述方法的一种改进,所述目标检测模型的输入为包含待判断目标的一组星空场景图像序列,输出为检测结果图像序列,所述改进的u-net语义分割网络包括编码器和解码器;其中,
21、所述编码器用于通过三次下采样操作来逐步提取高维运动特征;包括:三层收缩卷积模块和最大池化模块;其中所述收缩卷积模块包括三维卷积单元、批归一单元、relu激活函数单元以及软阈值计算单元;
22、所述软阈值计算单元包括绝对值计算单元、全局平均池化单元、全连接网络以及sigmoid激活函数;
23、所述解码器用于通过2×2的3d反卷积方式还原图像尺寸,并通过1×1的3d卷积调整通道数以融合浅层特征和深层特征,最终通过激活函数逐像素的对恒星和目标进行分类,包括:多层上采样模块。
24、作为上述方法的一种改进,所述步骤2)具体包括:
25、步骤2-1)根据检测结果二值化图像确定待判断目标在原始数据各帧图像中的位置:
26、其中,分别表示待判断目标在第i帧图像上位置的横坐标和纵坐标;
27、步骤2-2)在星空场景图像序列中找到待判断目标,根据在第i帧图像上的灰度值gi,构成离散的时序信号序列g,表示为:
28、并计算平均灰度值;
29、其中,n为该组图像序列的帧数;
30、步骤2-3)记录待判断目标的像面运动轨迹:
31、;
32、步骤2-4)根据下式得到待判断目标在像平面中的平均运动速度v:
33、其中,表示第i+1帧与第i帧拍摄时间间隔;,分别表示待判断目标在第i+1帧图像上位置的横坐标和纵坐标;
34、步骤2-5)将步骤2-1)至2-4)的结果更新到态势感知对象知识图谱。
35、作为上述方法的一种改进,所述步骤3):
36、步骤3-1)获取相机拍摄时间、卫星姿态角、相机视场、观测卫星两行轨道根数信息,并从空间目标态势感知知识库中获取已知目标的两行轨道根数信息;
37、步骤3-2)将和分别输入sgp4模型中,得到当前时刻下观测卫星和已知目标在temed坐标系下的位置 ;
38、步骤3-3)进行坐标转换,将待判断目标由temed坐标系下的坐标转换为像平面坐标系下的坐标信息,同时判断当前观测相机的视场中是否会出现已知目标以及观测相机是否具备探测该已知目标的能力;
39、步骤3-4)通过轨迹预报值对比和光度曲线对比,判断待判断目标是否为新目标。
40、作为上述方法的一种改进,所述步骤3-3)具体包括:
41、步骤3-3-1)将temed坐标系坐标转换到j2000坐标系下;
42、步骤3-3-2)进行j2000坐标系到星载相机坐标系的转换,并取观测卫星姿态角,若已知目标的赤经赤纬满足下式,则当前时刻下星载相机能够拍摄到已知目标;
43、其中r为相机视场半径;分别为观测卫星的滚动、俯仰和偏航角;
44、步骤3-3-3)对于星载相机能够拍摄到的已知目标,从态势感知对象知识图谱中获取其星等,同时从态势感知系统知识图谱中获取星载相机的极限探测星等,若,说明态势感知系统不具备探测该已知目标的能力,则待判断目标不是已知目标或仅为噪声点;
45、步骤3-3-4)进行星载相机坐标系到平面坐标系的投影变换,得到待判断目标在像平面坐标系下的坐标信息。
46、作为上述方法的一种改进,所述步骤3-4)具体包括:
47、步骤3-4-1)根据实拍图像序列中每帧图像拍摄时刻,分别计算对应时刻已知目标的像平面位置,得到目标轨迹预报值;
48、步骤3-4-2)将待判断目标实际轨迹与轨迹预报值进行对比,记录每个轨迹点上实际轨迹与预报值的误差;
49、步骤3-4-3)记录待判断目标实际轨迹每个轨迹点对应在图像上的灰度值,根据下式计算当前轨迹点的星等:
50、
51、步骤3-4-4)根据每个轨迹点的星等,形成待判断目标的光度曲线;
52、步骤3-4-5)将光度曲线与空间目标态势感知知识库中已知目标的光度曲线进行对比,得到光度曲线相似度;
53、步骤3-4-6)判断误差是否超过设定的第一阈值并且光度曲线相似度超过设定的第二阈值,判断为是,则判定待判断目标为新目标,向空间目标态势感知知识库增加新目标的观测特性和轨道信息;判断为否,则待判断目标为已知目标,向空间目标态势感知知识库更新观测特性和异动信息。
54、另一方面,本发明提出了一种知识驱动的空间目标态势感知系统,所述系统包括:目标检测模型、检测模块、更新模块和判断模块;其中,
55、所述检测模块,用于将采集的一组星空场景图像序列输入预先建立和训练好的目标检测模型进行检测,得到检测结果;
56、所述更新模块,用于根据检测结果提取待判断目标对应的观测信息,对已建立的空间目标态势感知知识库进行更新和补充;
57、所述判断模块,用对于待判断目标,结合空间目标态势感知知识库,通过轨迹预报值对比和光度曲线对比,判断是否为新目标;
58、所述目标检测模型为改进的u-net语义分割网络。
59、与现有技术相比,本发明的优势在于:
60、1、本发明提出一种基于知识驱动的空间目标态势感知框架,知识驱动的空间目标态势感知不局限于传统的单一物理测量方式,而是将知识融入到空间目标态势感知系统中,通过对空间目标态势感知系统的功能分析,定义了空间目标态势感知所需的知识体系,构建空间目标态势感知知识库,丰富了空间态势感知系统的功能, 有效提升空间探测中对空间目标的探测能力,为天基空间态势感知系统的建设提供技术支撑;
61、2、本发明提出了一种基于机器学习暗弱空间目标检测方法,通过获取目标时空演化特性提取知识,以支持知识驱动的空间目标态势感知应用;
62、3、本发明提出知识驱动的新目标发现与分类方法,基于空间目标知识库,结合传统空间目标检测方法开展了知识驱动的新目标发现应用研究,提升了空间目标态势感知过程中对新目标的发现、分类以及识别能力。
- 还没有人留言评论。精彩留言会获得点赞!