一种基于动态视觉传感器的图像视差计算方法及装置与流程
本发明涉及计算机视觉,尤其是一种基于动态视觉传感器的图像视差计算方法及装置。
背景技术:
1、目前,图像视差计算技术已经在许多重要的应用场景,例如,对象识别、场景三维建模和辅助驾驶等应用场景中发挥了核心作用。在高速公路使用双目立体匹配可以有效的替代雷达获得车辆图像的视差信息,其优点是价格低廉、数据稠密、具有可视特征等。但是传统的双目相机数据量大、计算时间长、时间分辨率低等特点,使得其对高速运动的车辆图像视差进行计算的效率较低。综合上述,相关技术中存在的技术问题亟需得到解决。
技术实现思路
1、有鉴于此,本发明实施例提供一种基于动态视觉传感器的图像视差计算方法及装置,以实现提高图像视差的计算效率。
2、一方面,本发明提供了一种基于动态视觉传感器的图像视差计算方法,包括:
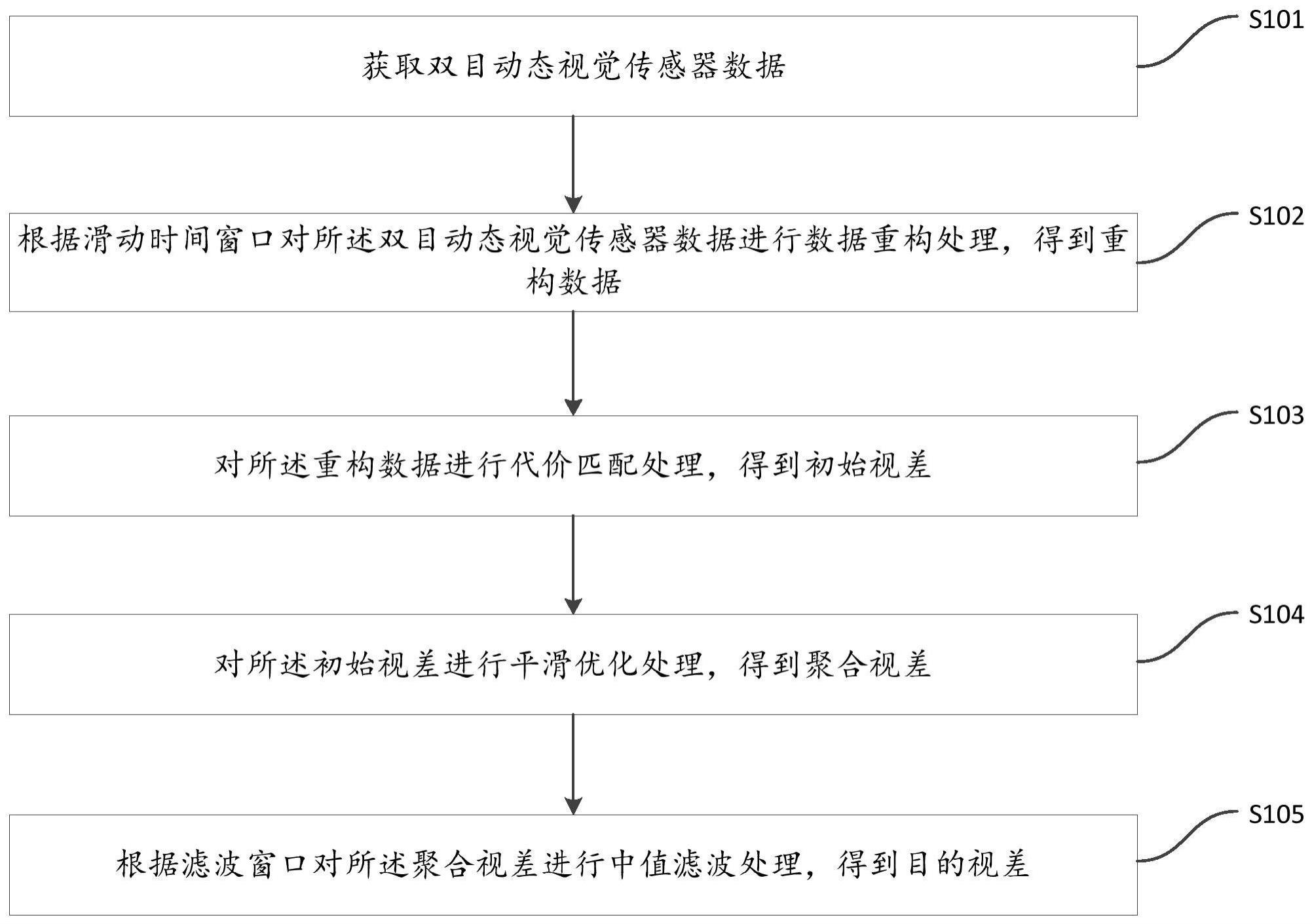
3、获取双目动态视觉传感器数据;
4、根据滑动时间窗口对所述双目动态视觉传感器数据进行数据重构处理,得到重构数据;
5、对所述重构数据进行代价匹配处理,得到初始视差;
6、对所述初始视差进行平滑优化处理,得到聚合视差;
7、根据滤波窗口对所述聚合视差进行中值滤波处理,得到目的视差。
8、可选地,所述获取双目动态视觉传感器数据,包括:
9、通过动态视觉传感器获取双目动态视觉传感器图像;
10、根据低压差分信号对所述双目动态视觉传感器图像进行数据传输,并通过串并转换处理,得到双目动态视觉传感器数据。
11、可选地,所述根据滑动时间窗口对所述双目动态视觉传感器数据进行数据重构处理,得到重构数据,包括:
12、获取所述双目动态视觉传感器数据,所述双目动态视觉传感器数据包括事件时间、事件位置和事件极性;
13、根据所述事件位置对所述双目动态视觉传感器数据按照所述事件时间进行升序排列处理,得到排序数据;
14、根据所述滑动时间窗口对所述排序数据进行向量构建处理,得到事件向量;
15、根据所述事件向量对所述双目动态视觉传感器数据进行重构处理,得到重构数据,所述重构数据包括窗口初始事件、事件位置和窗口事件向量。
16、可选地,对所述重构数据进行代价匹配处理,得到初始视差,包括:
17、对所述重构数据进行匹配代价计算处理,得到代价空间;
18、根据赢者通吃策略对所述代价空间进行选取处理,得到初始视差。
19、可选地,所述对所述初始视差进行平滑优化处理,得到聚合视差,包括:
20、获取支撑窗口;
21、根据所述支撑窗口对所述初始视差进行代价聚合处理,得到聚合视差集合;
22、根据所述支撑窗口从所述聚合视差集合中选取能量最小的视差,确定为聚合视差。
23、可选地,所述根据滤波窗口对所述聚合视差进行中值滤波处理,得到目的视差,包括:
24、获取视差窗口;
25、根据所述视差窗口对所述聚合视差的出现次数进行统计,得到视差统计表;
26、对所述视差统计表进行中值选取处理,得到目的视差。
27、另一方面,本发明实施例还提供了一种基于动态视觉传感器的图像视差计算装置,包括:
28、第一模块,用于获取双目动态视觉传感器数据;
29、第二模块,用于根据滑动时间窗口对所述双目动态视觉传感器数据进行数据重构处理,得到重构数据;
30、第三模块,用于对所述重构数据进行代价匹配处理,得到初始视差;
31、第四模块,用于对所述初始视差进行平滑优化处理,得到聚合视差;
32、第五模块,用于根据滤波窗口对所述聚合视差进行中值滤波处理,得到目的视差。
33、可选地,所述第一模块,用于获取双目动态视觉传感器数据,包括:
34、第一单元,用于通过动态视觉传感器获取双目动态视觉传感器图像;
35、第二单元,用于根据低压差分信号对所述双目动态视觉传感器图像进行数据传输,并通过串并转换处理,得到双目动态视觉传感器数据。
36、可选地,第二模块,用于根据滑动时间窗口对所述双目动态视觉传感器数据进行数据重构处理,得到重构数据,包括:
37、第三单元,用于获取所述双目动态视觉传感器数据,所述双目动态视觉传感器数据包括事件时间、事件位置和事件极性;
38、第四单元,用于根据所述事件位置对所述双目动态视觉传感器数据按照所述事件时间进行升序排列处理,得到排序数据;
39、第五单元,用于根据所述滑动时间窗口对所述排序数据进行向量构建处理,得到事件向量;
40、第六单元,用于根据所述事件向量对所述双目动态视觉传感器数据进行重构处理,得到重构数据,所述重构数据包括窗口初始事件、事件位置和窗口事件向量。
41、可选地,所述第三模块,用于对所述重构数据进行代价匹配处理,得到初始视差,包括:
42、第七单元,用于对所述重构数据进行匹配代价计算处理,得到代价空间;
43、第八单元,用于根据赢者通吃策略对所述代价空间进行选取处理,得到初始视差。
44、可选地,所述第四模块,用于对所述初始视差进行平滑优化处理,得到聚合视差,包括:
45、第九单元,用于获取支撑窗口;
46、第十单元,用于根据所述支撑窗口对所述初始视差进行代价聚合处理,得到聚合视差集合;
47、第十一单元,用于根据所述支撑窗口从所述聚合视差集合中选取能量最小的视差,确定为聚合视差。
48、可选地,所述第五模块,用于根据滤波窗口对所述聚合视差进行中值滤波处理,得到目的视差,包括:
49、第十二单元,用于获取视差窗口;
50、第十三单元,用于根据所述视差窗口对所述聚合视差的出现次数进行统计,得到视差统计表;
51、第十四单元,用于对所述视差统计表进行中值选取处理,得到目的视差。
52、另一方面,本发明实施例还公开了一种电子设备,包括处理器以及存储器;
53、所述存储器用于存储程序;
54、所述处理器执行所述程序实现如前面所述的方法。
55、另一方面,本发明实施例还公开了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现如前面所述的方法。
56、另一方面,本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
57、本发明采用以上技术方案与现有技术相比,具有以下技术效果:本发明实施例通过获取双目动态视觉传感器数据;根据滑动时间窗口对所述双目动态视觉传感器数据进行数据重构处理,得到重构数据;对所述重构数据进行代价匹配处理,得到初始视差;对所述初始视差进行平滑优化处理,得到聚合视差;根据滤波窗口对所述聚合视差进行中值滤波处理,得到目的视差。本发明实施例通过使用数据稀疏、延迟低、时间分辨率高、动态范围大的动态视觉传感器数据计算图像视差,能够提高图像视差的计算效率。
- 还没有人留言评论。精彩留言会获得点赞!