车辆动力学建模与车辆状态预测方法、系统、设备及介质与流程
本技术实施例涉及车辆建模,特别涉及一种车辆动力学建模与车辆状态预测方法、系统、设备及介质。
背景技术:
1、在自动驾驶领域中,为了以较低成本调试与验证各项相关技术,如感知技术、决策控制技术、通信技术等,需要在车辆仿真平台上进行仿真测试,其中的一个关键技术为车辆动力学的建模与仿真。建模与仿真精度直接影响了测试结果的可靠性,并且建模与仿真的时间成本和物料成本也会影响研发周期与成本预算。
2、车辆动力学模型旨在根据当前的车辆运动状态和控制输入,准确的预测未来时刻车辆的部分运动状态观测(简称未来状态部分观测)。使用恰当的模型根据车辆当前及过往时刻的运动学观测数据和控制量数据(分别简称可用观测数据和可用控制量数据,合称可用数据),恢复当前时刻车辆尽可能完整的运动状态,是准确预测未来状态部分观测的关键。
3、现有技术通常以当前时刻的可用数据或者有限的固定时间长度的可用数据作为一次预测的输入数据,输入到模型中用于预测未来状态部分观测,由于使用当前时刻或者有限的固定时间长度的可用数据进行建模无法利用更早的可用数据的信息,从而损失了预测的精度。另外,由于预测某时刻的未来状态部分观测时需要输入并处理一段固定时间长度的可用数据,而预测该时刻下一时刻的未来状态部分观测时同样需要输入并处理一段固定时间长度的可用数据,前后两个时刻的输入数据大部分是重合的,后一时刻的输入数据相比于前一时刻丢弃了最早的一帧数据并加入了一帧新的数据。这意味着两次预测时处理输入数据的过程存在可复用的信息,分别独立处理输入数据的方法未能利用可复用信息从而造成了重复的冗余计算,提高了模型建模时和仿真时的计算成本。
技术实现思路
1、本技术实施例提供一种车辆动力学建模与车辆状态预测方法、系统、设备及介质,通过在整段行驶数据上沿时间传递隐状态编码,从而以较低的计算复杂度获得任意时刻车辆运动状态的隐编码估计,并用于估计下一时刻的运动状态,以提高车辆动力学精度和仿真帧率。
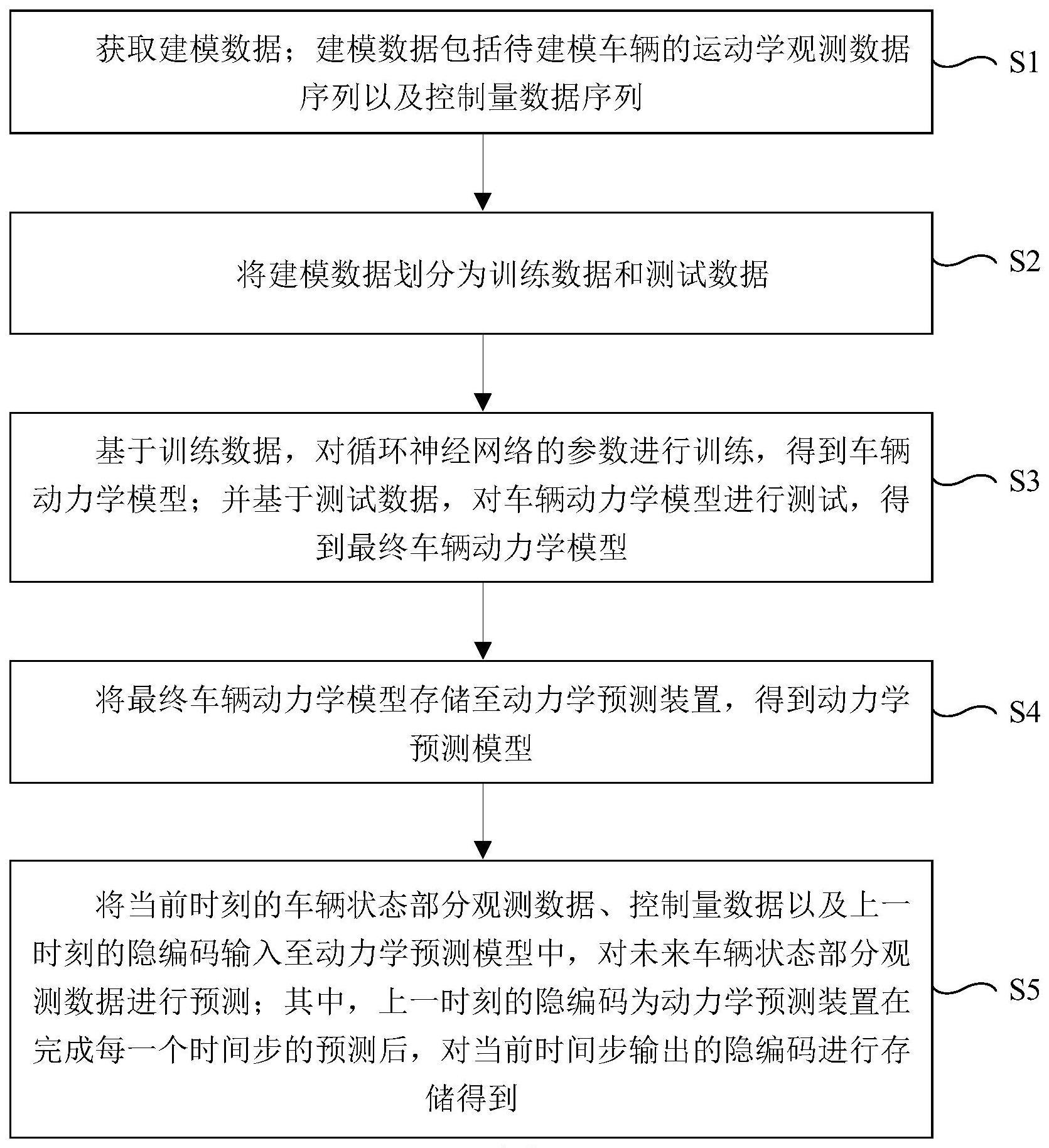
2、为解决上述技术问题,第一方面,本技术实施例提供一种车辆动力学建模与车辆状态预测方法,包括以下步骤:首先,获取建模数据;建模数据包括待建模车辆的运动学观测数据序列以及控制量数据序列;然后,将建模数据划分为训练数据和测试数据;接下来,基于训练数据,对循环神经网络的参数进行训练,得到车辆动力学模型;并基于测试数据,对车辆动力学模型进行测试,得到最终车辆动力学模型;然后,将最终车辆动力学模型存储至动力学预测装置,得到动力学预测模型;最后,将当前时刻的车辆状态部分观测数据、控制量数据以及上一时刻的隐编码输入至动力学预测模型中,对未来车辆状态部分观测数据进行预测;其中,上一时刻的隐编码为动力学预测装置在完成每一个时间步的预测后,对当前时间步输出的隐编码进行存储得到。
3、在一些示例性实施例中,将车辆的当前时刻车辆状态部分观测数据、控制量数据以及上一时刻的隐编码输入动力学预测模型,对未来车辆状态部分观测数据进行预测,包括:在一个车辆状态部分观测预测任务开始时,生成一个全零隐编码并存储在动力学预测装置中;在车辆状态部分观测在线预测任务中,对于每一个时间步,将当前的车辆状态部分观测数据、控制量数据以及在上一时刻的隐编码输入至动力学模型中,动力学模型输出未来车辆状态部分观测和新的隐编码。
4、在一些示例性实施例中,待建模车辆的运动学观测数据序列通过以固定时间间隔采样得到;待建模车辆的运动学观测数据包括车辆的位置数据、速度数据、方位角数据、方位角速度数据。
5、在一些示例性实施例中,控制量数据序列通过以固定时间间隔采样得到;控制量数据包括待建模车辆的动力控制量、制动控制量以及方向盘控制量。
6、在一些示例性实施例中,基于建模数据中数据长度占总长度的比例,将建模数据划分为训练数据和测试数据。
7、在一些示例性实施例中,基于训练数据,对循环神经网络的参数进行训练,得到车辆动力学模型,包括:对循环神经网络初始化,作为初始动力学模型;采用初始动力学模型,对训练数据中的输入数据和上一时刻的隐编码并输出未来时刻的动力学预测作为输出数据;采用损失函数计算输出数据和训练数据中的目标数据之间的损失值;采用tbptt方法计算初始动力学模型内参数对损失值的偏导数,并基于梯度的优化算法对初始动力学模型内参数进行迭代优化,得到车辆动力学模型。
8、在一些示例性实施例中,基于测试数据,对车辆动力学模型进行测试,得到最终车辆动力学模型,包括:基于测试数据,计算车辆动力学模型的预测精度指标;判断预测精度指标是否优于迭代优化过程中的优化结果;若是,则记录当前时刻的车辆动力学模型为当前最优模型,并且记录当前时刻的测试数据的预测精度为最优精度;若否,则继续进行迭代优化过程;其中,迭代优化过程为对初始动力学模型内参数进行迭代优化的过程。
9、第二方面,本技术实施例还提供了一种车辆动力学建模与车辆状态预测系统,包括:依次连接的数据集模块、车辆动力学模型构建模块以及动力学预测模块;数据集模块用于获取建模数据;建模数据包括待建模车辆的运动学观测数据序列以及控制量数据序列;将建模数据划分为训练数据和测试数据;车辆动力学模型构建模块用于根据训练数据,对循环神经网络的参数进行训练,得到车辆动力学模型;并基于测试数据,对车辆动力学模型进行测试,得到最终车辆动力学模型;动力学预测模块用于将最终车辆动力学模型存储至动力学预测装置,得到动力学预测模型;将当前时刻的车辆状态部分观测数据、控制量数据以及上一时刻的隐编码输入至动力学预测模型中,对未来车辆状态部分观测数据进行预测;其中,上一时刻的隐编码为动力学预测装置在完成每一个时间步的预测后,对当前时间步输出的隐编码进行存储得到。
10、另外,本技术还提供了一种电子设备,包括:至少一个处理器;以及,与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述车辆动力学建模与车辆状态预测方法。
11、另外,本技术还提供了一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上述车辆动力学建模与车辆状态预测方法。
12、本技术实施例提供的技术方案至少具有以下优点:
13、本技术实施例提供一种车辆动力学建模与车辆状态预测方法、系统、设备及介质,该方法包括以下步骤:首先,获取建模数据;建模数据包括待建模车辆的运动学观测数据序列以及控制量数据序列;然后,将建模数据划分为训练数据和测试数据;接下来,基于训练数据,对循环神经网络的参数进行训练,得到车辆动力学模型;并基于测试数据,对车辆动力学模型进行测试,得到最终车辆动力学模型;然后,将最终车辆动力学模型存储至动力学预测装置,得到动力学预测模型;最后,将当前时刻的车辆状态部分观测数据、控制量数据以及上一时刻的隐编码输入至动力学预测模型中,对未来车辆状态部分观测数据进行预测;其中,上一时刻的隐编码为动力学预测装置在完成每一个时间步的预测后,对当前时间步输出的隐编码进行存储得到。
14、本技术提供的车辆动力学建模与车辆状态预测方法,在动力学预测装置上运行一个包含循环神经网络的车辆动力学模型。车辆动力学模型在任意时刻以当前预测时刻的车辆部分观测、控制量以及上一时刻的隐编码作为输入,预测未来状态部分观测并输入当前时刻的隐编码。
15、另外,本技术还采用截断式沿时间方向传播(truncated backpropagationthrough time,简称tbptt)方法不断训练包含循环神经网络的动力学模型,经过测试数据验证后输出验证误差最低的模型作为建模结果输出。由于采用tbptt方法训练循环神经网络作为动力学建模的核心部件,一方面,本技术提供的车辆动力学建模与车辆状态预测方法允许以任意时间长度的可用数据为输入以预测未来状态部分观测,因此具有更高的数据处理灵活度和预测精度。另一方面,本技术在完成当前时间步的预测处理的同时会输出固定长度的表征了隐编码作为下一次预测的输入,从而避免了重新处理历史可用数据,故降低了单步预测的平均计算量,提高了预测帧率。
- 还没有人留言评论。精彩留言会获得点赞!