一种基于动力学守恒定律的弹道目标关联方法
本发明涉及计算机,尤其是一种基于动力学守恒定律的弹道目标关联方法。
背景技术:
1、弹道导弹的飞行包括三个阶段:助推段、中段和再入段。其中,中段是识别和拦截弹道导弹的重要阶段。为了提高弹道导弹的突防能力,突防方通常会在中段采取多种突防措施,主要有释放诱饵或箔条、末修舱爆炸产生碎片、有源干扰等。这些目标会伴随弹道导弹高速飞行,它们空间分布密集,运动状态相似,从而形成突防云团。对雷达系统而言,这是典型的密集多目标环境,会对雷达跟踪关联造成干扰,导致真目标错跟或失跟。针对空间密集群目标的数据关联问题,国内外有诸多研究。但现有方法多立足于关联算法的改进或弹道群目标的空间特性,而未考虑弹道目标的运动学特性。由于弹道导弹在中段飞行期间处于距离地面几十至上千公里的高空,大气稀薄,空气阻力可以被忽略,可看作只受地球引力影响。
技术实现思路
1、有鉴于此,本发明实施例提供一种精度高的,基于动力学守恒定律的弹道目标关联方法,以关联级解决抑制电假目标点迹干扰的问题,并提高真目标的跟踪精度。
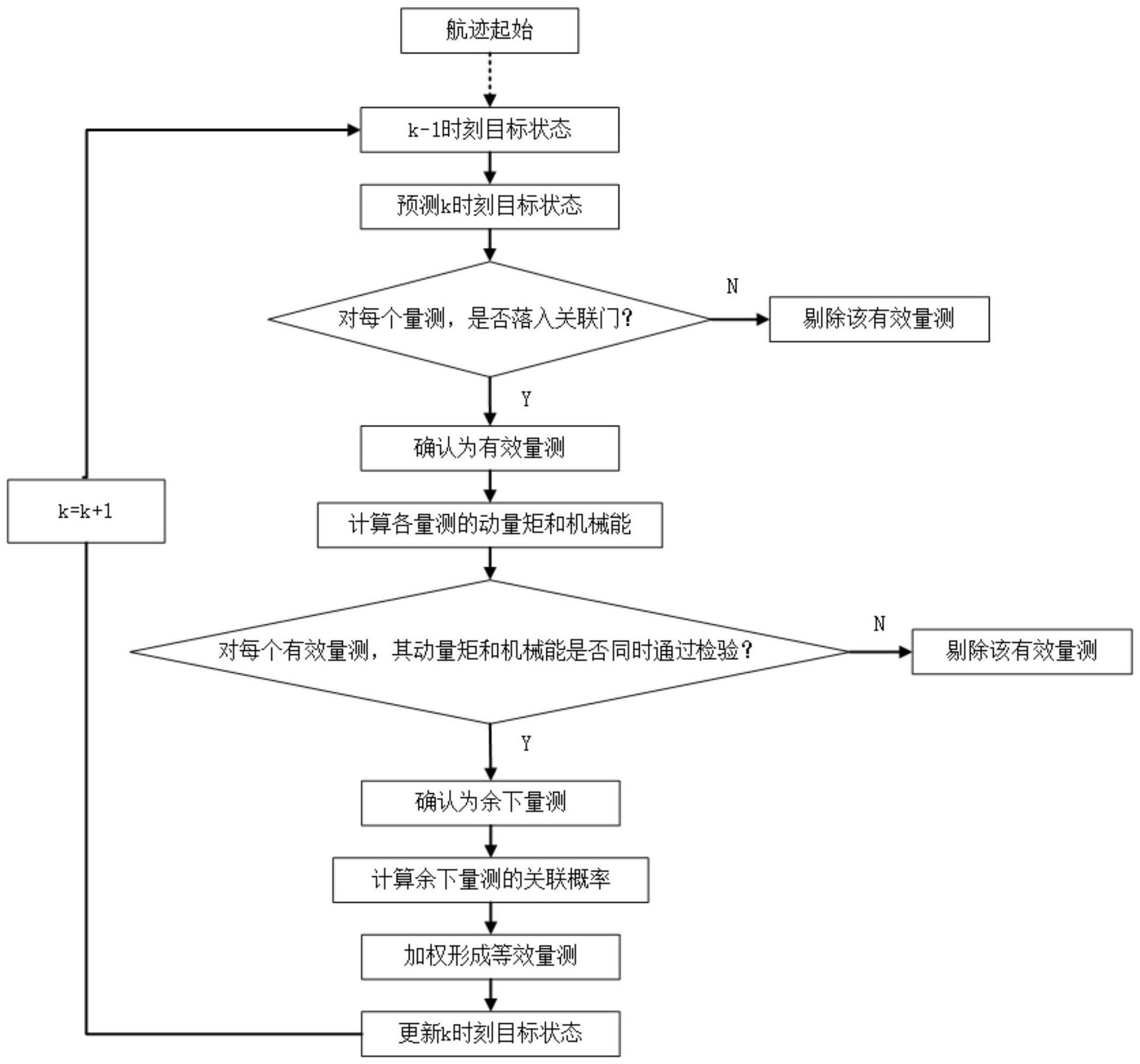
2、本发明实施例的一方面提供了一种基于动力学守恒定律的弹道目标关联方法,包括:
3、采用航迹起始方法生成起始航迹;
4、根据所述起始航迹以及目标对象在目标时刻的目标状态,预测对应的目标位置;
5、利用关联门确定候选有效量测;
6、通过动量矩和机械能的联合假设检验对所述候选有效量测进行筛选,得到目标有效量测;
7、根据所述目标位置和所述目标有效量测,通过关联滤波确定所述目标对象的目标航迹。
8、可选地,所述根据所述起始航迹以及目标对象在目标时刻的目标状态,预测对应的目标位置,包括:
9、采用滤波算法对目标时刻的目标状态进行预测,得到时刻目标预测状态、预测协方差、预测位置、新息协方差、滤波增益;所述滤波算法包括扩展卡尔曼滤波算法和不敏卡尔曼滤波算法;
10、所述目标时刻的预测状态的计算公式为:
11、
12、其中,代表预测状态;k代表目标时刻;x代表以雷达站为中心的东北天坐标系下的目标状态;f()代表状态方程;δt代表实际雷达探测时相邻两帧数据的时间间隔;f代表雅可比矩阵;
13、所述状态方程的计算公式为:
14、
15、所述雅可比矩阵f(x)的计算公式为:
16、
17、其中,x、y、z分别代表目标的x、y、z轴坐标,分别代表目标在x、y、z轴方向上的速度;μ代表地心引力常数;re代表目标到地心的距离;ro为地球平均半径;
18、所述预测位置的计算公式为:
19、
20、其中,为预测位置;h()代表量测方程;
21、所述预测协方差的计算公式为:
22、
23、φ(k)=i+f(x(k-1))δt
24、其中,σq为过程噪声标准差,i表示单位矩阵;代表预测协方差;φ(k)代表状态转移矩阵;p(k-1)代表上一时刻目标更新后的协方差;
25、所述新息协方差的计算公式为:
26、
27、其中,σr、σθ、分别为距离、方位角、俯仰角噪声标准差,h(x)为h(x)的雅可比矩阵;s(k)代表新息协方差;r(k)代表量测噪声协方差。
28、可选地,所述通过动量矩和机械能的联合假设检验对所述候选有效量测进行筛选,得到目标有效量测,包括:
29、对有效量测进行无偏转换;
30、求有效量测的瞬时动量矩、机械能及对应的方差;
31、估计目标时刻的动量矩和机械能的守恒值;
32、建立动量矩和机械能的统计检验模型并进行联合假设检验。
33、可选地,所述对有效量测进行无偏转换,包括:
34、对有效量测进行量测位置转换;
35、对有效量测进行预测速度转换;
36、其中,所述对有效量测进行量测位置转换包括:将球坐标系下的有效量测转换为enu坐标系下的量测;将enu坐标系下的量测转换为地心惯性坐标系下的量测;
37、所述对有效量测进行预测速度转换包括:从目标时刻的预测状态中取出目标时刻enu坐标系下的预测速度,从预测协方差中取出预测速度的协方差;将预测速度转换为eci坐标系下的速度,并得到对应的协方差矩阵。
38、可选地,所述求有效量测的瞬时动量矩、机械能及对应的方差,包括:
39、计算有效量测的动量矩分量、动量矩的方差、机械能以及机械能的方差;
40、所述估计目标时刻的动量矩和机械能的守恒值,包括:
41、计算动量矩的加权最小二乘估计;
42、计算机械能的加权最小二乘估计;
43、所述建立动量矩和机械能的统计检验模型并进行联合假设检验,包括:
44、对动量矩建立统计检验量;
45、对机械能建立统计检验量;
46、根据动量矩和机械能的统计检验量,进行联合假设检验。
47、可选地,所述根据所述目标位置和所述目标有效量测,通过关联滤波确定所述目标对象的目标航迹,包括:
48、使用动量矩和机械能信息修正加权概率;
49、使用pda方法关联确定目标航迹;
50、所述使用动量矩和机械能信息修正加权概率,包括:根据目标时刻下剩余的量测个数,确定量测为真目标点迹的概率;
51、所述使用pda方法关联确定目标航迹,包括:确定目标时刻有效量测的新息,形成等效量测的新息,用等效量测更新目标状态以及更新协方差;根据更新后的状态计算目标时刻的瞬时动量矩和机械能。
52、本发明实施例的另一方面还提供了一种基于动力学守恒定律的弹道目标关联装置,包括:
53、第一模块,用于采用航迹起始方法生成起始航迹;
54、第二模块,用于根据所述起始航迹以及目标对象在目标时刻的目标状态,预测对应的目标位置;
55、第三模块,用于利用关联门确定候选有效量测;
56、第四模块,用于通过动量矩和机械能的联合假设检验对所述候选有效量测进行筛选,得到目标有效量测;
57、第五模块,用于根据所述目标位置和所述目标有效量测,通过关联滤波确定所述目标对象的目标航迹。
58、本发明实施例的另一方面还提供了一种电子设备,包括处理器以及存储器;
59、所述存储器用于存储程序;
60、所述处理器执行所述程序实现如前面所述的方法。
61、本发明实施例的另一方面还提供了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现如前面所述的方法。
62、本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
63、本发明的实施例采用航迹起始方法生成起始航迹;根据所述起始航迹以及目标对象在目标时刻的目标状态,预测对应的目标位置;利用关联门确定候选有效量测;通过动量矩和机械能的联合假设检验对所述候选有效量测进行筛选,得到目标有效量测;根据所述目标位置和所述目标有效量测,通过关联滤波确定所述目标对象的目标航迹。本发明的精度高,能够关联级解决抑制电假目标点迹干扰的问题,并提高真目标的跟踪精度。
- 还没有人留言评论。精彩留言会获得点赞!