积水深度估计方法、装置、电子设备及存储介质与流程
本技术涉及图像处理,尤其涉及一种积水深度估计方法、装置、电子设备及存储介质。
背景技术:
1、道路积水对于车辆通过,安全行使和礼貌驾驶而言十分重要。
2、道路上的路面积水由于反光倒影,一般传感器无法直接获取水面深度。当前实践中往往依赖其他辅助信息才能判断积水和积水厚度,例如,依靠轮胎吃水判断积水深度,或者依赖精确定位信息获取积水所在路面的高精度地图信息,根据地图信息推算积水深度。该方法需要预先有对应路段的高精度地图信息,且需要检测时具备精确定位功能。或者,需要借助预先拍摄的无积水路段3维数据估计积水深度,并与有积水时的三维数据比较获得积水深度信息。此方法需要预先有该路段的三维信息,有很强的限制性,无法解决在无先验无积水三维数据时积水深度预估。
3、上述两种方式需要依赖如高精度地图或预测量三维数据等信息进行积水深度估计,积水深度估计的难度较大。
技术实现思路
1、本技术实施例提供一种积水深度估计方法、装置、电子设备及存储介质,以解决现有技术需要依赖如高精度地图或预测量三维数据等信息进行积水深度估计,积水深度估计的难度较大。
2、为了解决上述技术问题,本技术实施例是这样实现的:
3、第一方面,本技术实施例提供了一种积水深度估计方法,所述方法包括:
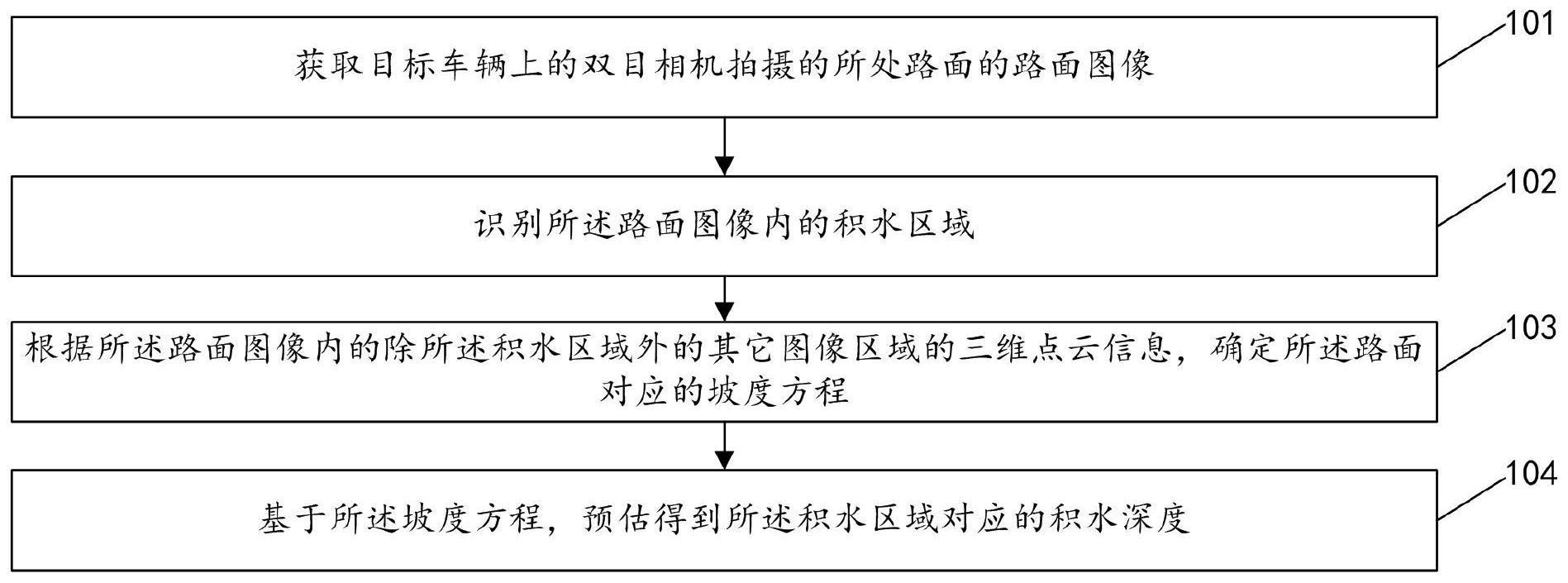
4、获取目标车辆上的双目相机拍摄的所处路面的路面图像;
5、识别所述路面图像内的积水区域;
6、根据所述路面图像内的除所述积水区域外的其它图像区域的三维点云信息,确定所述路面对应的坡度方程;
7、基于所述坡度方程,预估得到所述积水区域对应的积水深度。
8、可选地,所述识别所述路面图像内的积水区域,包括:
9、采用语义分割算法对所述路面图像进行语义分割处理,得到积水区域的边界信息;
10、基于所述边界信息,确定所述路面图像内的积水区域。
11、可选地,所述根据所述路面图像内的除所述积水区域外的其它图像区域的三维点云信息,确定所述路面对应的坡度方程,包括:
12、获取所述路面图像内每个像素点的初始三维点云信息;
13、剔除所述初始三维点云信息中位于所述积水区域内的点云信息,得到所述其它图像区域的三维点云信息;
14、根据所述三维点云信息,确定所述路面在所述目标车辆的车身方向上的多条高程曲线;
15、对所述多条高程曲线分别进行拟合处理,得到所述多条高程曲线对应的多个所述坡度方程。
16、可选地,所述基于所述坡度方程,预估得到所述积水区域对应的积水深度,包括:
17、根据所述积水区域的边界点和所述坡度方程,预估得到所述积水区域对应的积水深度。
18、可选地,所述根据所述积水区域的边界点和所述坡度方程,预估得到所述积水区域对应的积水深度,包括:
19、获取所述路面图像内无积水区域处的参照物的第一高度,及位于所述积水区域处的所述参照物的第二高度;
20、获取所述第一高度和所述第二高度之间的高度差值;
21、基于所述高度差值、所述边界点和所述坡度方程,预估得到所述积水区域对应的积水深度。
22、可选地,在所述基于所述坡度方程,预估得到所述积水区域对应的积水深度之后,还包括:
23、在所述积水深度大于第一深度阈值的情况下,输出所述目标车辆对应的绕行驾驶的驾驶提示信息;或者
24、在所述积水深度小于等于所述第一深度阈值,大于第二深度阈值的情况下,输出所述目标车辆对应的减速驾驶的驾驶提示信息;或者
25、在所述积水深度小于等于所述第二深度阈值的情况下,输出所述目标车辆对应的安全驶过所述积水区域的驾驶提示信息。
26、第二方面,本技术实施例提供了一种积水深度估计装置,所述装置包括:
27、路面图像获取模块,用于获取目标车辆上的双目相机拍摄的所处路面的路面图像;
28、积水区域识别模块,用于识别所述路面图像内的积水区域;
29、坡度方程确定模块,用于根据所述路面图像内的除所述积水区域外的其它图像区域的三维点云信息,确定所述路面对应的坡度方程;
30、积水深度预估模块,用于基于所述坡度方程,预估得到所述积水区域对应的积水深度。
31、可选地,所述积水区域识别模块包括:
32、边界信息获取单元,用于采用语义分割算法对所述路面图像进行语义分割处理,得到积水区域的边界信息;
33、积水区域确定单元,用于基于所述边界信息,确定所述路面图像内的积水区域。
34、可选地,所述坡度方程确定模块包括:
35、初始点云获取单元,用于获取所述路面图像内每个像素点的初始三维点云信息;
36、三维点云获取单元,用于剔除所述初始三维点云信息中位于所述积水区域内的点云信息,得到所述其它图像区域的三维点云信息;
37、高程曲线确定单元,用于根据所述三维点云信息,确定所述路面在所述目标车辆的车身方向上的多条高程曲线;
38、坡度方程获取单元,用于对所述多条高程曲线分别进行拟合处理,得到所述多条高程曲线对应的多个所述坡度方程。
39、可选地,所述积水深度预估模块包括:
40、积水深度预估单元,用于根据所述积水区域的边界点和所述坡度方程,预估得到所述积水区域对应的积水深度。
41、可选地,所述积水深度预估单元包括:
42、参照物高度获取子单元,用于获取所述路面图像内无积水区域处的参照物的第一高度,及位于所述积水区域处的所述参照物的第二高度;
43、高度差值获取子单元,用于获取所述第一高度和所述第二高度之间的高度差值;
44、积水深度预估子单元,用于基于所述高度差值、所述边界点和所述坡度方程,预估得到所述积水区域对应的积水深度。
45、可选地,所述装置还包括:
46、第一提示信息输出模块,用于在所述积水深度大于第一深度阈值的情况下,输出所述目标车辆对应的绕行驾驶的驾驶提示信息;
47、第二提示信息输出模块,用于在所述积水深度小于等于所述第一深度阈值,大于第二深度阈值的情况下,输出所述目标车辆对应的减速驾驶的驾驶提示信息;
48、第三提示信息输出模块,用于在所述积水深度小于等于所述第二深度阈值的情况下,输出所述目标车辆对应的安全驶过所述积水区域的驾驶提示信息。
49、第三方面,本技术实施例提供了一种电子设备,包括:
50、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现上述任一项所述的积水深度估计方法。
51、第四方面,本技术实施例提供了一种可读存储介质,当所述存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述任一项所述的积水深度估计方法。
52、在本技术实施例中,通过获取目标车辆上的双目相机拍摄的所处路面的路面图像,识别所述路面图像内的积水区域。根据路面图像内的除积水区域外的其它图像区域的三维点云信息,确定路面对应的坡度方程。基于坡度方程,预估得到积水区域对应的积水深度。本技术实施例通过双目相机拍摄的rgb图像获取当前道路无积水路面的精确点云信息,通过高程拟合法推算积水深度,不需要依赖高精度地图和预测量三维数据等信息,降低了积水深度估计的难度。
53、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!