基于深度神经网络的焊缝X射线图像缺陷检测与识别方法
本发明涉及射线成像与无损检测,具体涉及一种基于深度神经网络的焊缝x射线图像缺陷检测与识别方法。
背景技术:
1、在工业管道运输,机器制造等领域中,焊缝技术成为关键。由于人员焊缝技术和复杂环境都将导致焊缝缺陷,很大程度降低产品质量,同时也可能造成人员伤亡和财产损失,因此进行焊缝缺陷检测与识别具有重要意义。x射线检测是将强度均匀的射线照射到被测的物体,使透过的射线在照相胶片上感光,而在成像的底片上,可以检测出被检测物体的焊接缺陷位置、类型、尺寸和数目等。要评定x射线对焊缝的检测结果,必须对获取的焊缝射线图像进行分析处理以评价焊接质量。评定x射线检测结果有两种方法:人工评定和计算机图像识别评定。
2、目前通过人工和计算机识别对焊缝图像结果进行评定。在人工评定的过程中,由于工作量大,强光对眼睛会造成伤害,而且不同技术人员的效率和经验不同,提高错判率。计算机识别可以大幅度的提升分析与评定的效率,更好的解决由于技术人员的经验差异而造成的误判或者漏判。
3、随着计算机的发展在机器视觉方面,目前采用传统算法对x射线检测结果进行分析和识别时,由于x射线检测图像质量较差,进行自动检测的难度较大。在焊缝x射线检测过程中,采用传统算法进行辅助判断,最终还是需要人工判断。因此该方法对工程师的要求较高,尤其是对质量较差的x射线检测图像,会出现较高的错检率和漏检率,从而影响检测效率。
技术实现思路
1、本发明提供一种基于深度神经网络的焊缝x射线图像缺陷检测与识别方法,目的是解决背景技术中存在的对工程师的要求较高、对质量较差的x射线检测图像会出现错检率和漏检率高的问题。
2、本发明提供的技术解决方案如下:
3、一种基于深度神经网络的焊缝x射线图像缺陷检测与识别方法,其特殊之处在于,包括以下步骤:
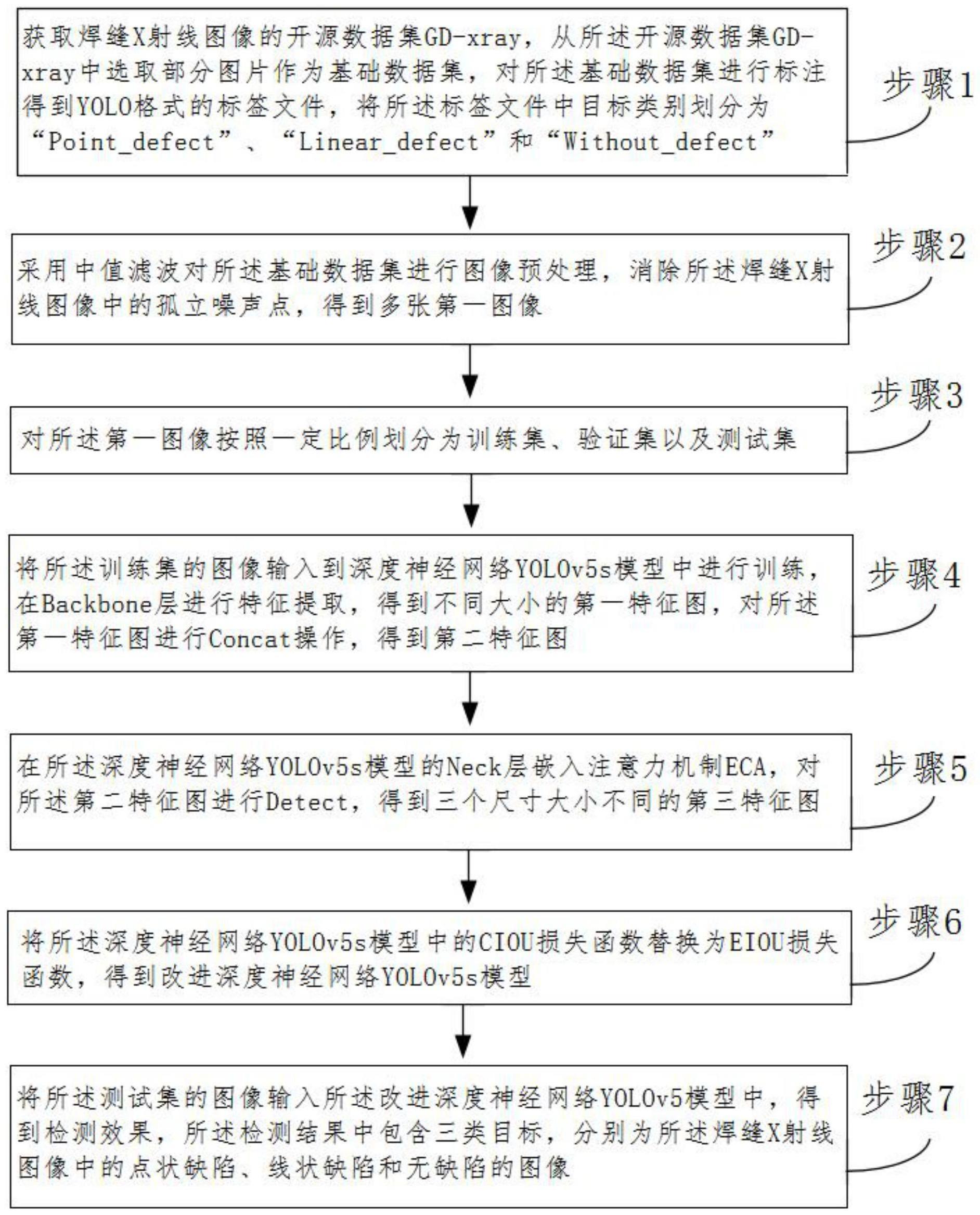
4、步骤1、获取焊缝x射线图像的开源数据集gd-xray,从所述开源数据集gd-xray中选取部分图片作为基础数据集,对所述基础数据集进行标注得到yolo格式的标签文件,将所述标签文件中目标类别划分为“point_defect”、“linear_defect”和“without_defect”;
5、步骤2、采用中值滤波对所述基础数据集进行图像预处理,消除所述焊缝x射线图像中的孤立噪声点,得到多张第一图像;
6、步骤3、对所述第一图像按照一定比例划分为训练集、验证集以及测试集;
7、步骤4、将所述训练集的图像输入到深度神经网络yolov5s模型中进行训练,在backbone层进行特征提取,得到不同大小的第一特征图,对所述第一特征图进行concat操作,得到第二特征图;
8、步骤5、在所述深度神经网络yolov5s模型的neck层嵌入注意力机制eca,对所述第二特征图进行detect,得到三个尺寸大小不同的第三特征图;
9、步骤6、将所述深度神经网络yolov5s模型中的ciou损失函数替换为eiou损失函数,得到改进深度神经网络yolov5s模型;
10、步骤7、将所述测试集的图像输入所述改进深度神经网络yolov5模型中,得到检测效果,所述检测结果中包含三类目标,分别为所述焊缝x射线图像中的点状缺陷、线状缺陷和无缺陷的图像。
11、进一步地,步骤1中,所述标签文件中包含目标类别、目标位置(x,y)和目标大小(w,h),所述目标类别名称分别为“point_defect”、“linear_defect”和“without_defect”,所述标签文件与所述基础数据集中的图像一一对应。
12、进一步地,所述采用中值滤波对所述开源数据集gd-xray进行图像预处理,具体为:
13、将所述焊缝x射线图像中的任一像素点的值定义为a,采用第一函数进行中值滤波处理,将所述像素点进行中值滤波处理后得到的值定义为a1,第一函数表达式如下:
14、
15、其中,xm表示a的邻域内所有像素点的值,a的邻域包含m个像素点。
16、进一步地,步骤3中,所述训练集:所述验证集:所述测试集的比例为7:2:1。
17、进一步地,步骤4中,将所述训练集、验证集中的图像裁剪成大小640×640,然后输入所述深度神经网络yolov5s模型中,进行mixup处理,在backbone层提取图像特征,得到不同大小的特征图,然后将所述特征图输入到采用fpn+pan结构的neck层,对所述特征图进行concat操作,充分融合图像的底层特征和高层特征。
18、进一步地,步骤5中,对所述深度神经网络yolov5s模型进行改进,在neck层嵌入轻量化模块eca注意力机制,将eca模块的通道数与c3模块输出特征图的通道数对应,分别设置为256、512和1024,根据第二函数对所述第二图像进行平均池化,得到平均池化结果favg,将输出结果favg视为1×c的二维向量x,x=[x1 x2 … xc],所述第二函数表达式为:
19、
20、其中,pavg为平均池化过程,xij是大小为w×h的特征图上横坐标为i,纵坐标为j的点,w和h分别是输入特征图的宽度和高度,xk表示二维向量x的第k个分量;
21、利用一维卷积提取favg中每k个通道的特征关系,k为一维卷积核的大小,通过权重矩阵wk来学习各通道的信息,其中权重矩阵wk表达式为:
22、
23、根据所述权重矩阵wk得到输出结果y为:
24、
25、其中,ωc,c为权重矩阵第c行第c列的分量,c为通道数;
26、由输出结果y看出,仅考虑xi与其k个相邻通道之间的相互作用,避免了降维,同时保持了通道注意,即
27、
28、其中,xi为第i个通道,表示xi的k个相邻通道的集合,k值与通道数之间的映射关系可以表示如下:
29、
30、其中,|x|odd表示与x最近的奇数,γ=2,b=1;为映射关系;
31、在detect得到尺寸大小为20×20、40×40、80×80的第三特征图,分别对应小、中、大三个尺寸的目标。
32、进一步地,步骤6中,所述ciou损失函数与所述eiou损失函数均分别包括ciou惩罚项和eiou惩罚项,所述eiou惩罚项是将影响因子在所述ciou惩罚项基础上拆开,分别计算目标框的长和锚框的宽,所述eiou惩罚项公式如下:
33、
34、其中,leiou为eiou惩罚项,liou为重叠损失,ldis为中心距离损失,lasp为宽高损失,iou为交并比,ρ为预测框和真实框的中心点之间的欧式距离,wgt和hgt分别表示真实框的宽度和高度,w和h分别表示预测框的宽度和高度,cw为目标框最小外接框的宽度,ch为目标框的最小外接框的高度。
35、进一步地,所述将所述测试集的图像输入所述改进深度神经网络yolov5模型中,得到检测效果,包括以下步骤:
36、将所述训练集的图像输入到深度神经网络yolov5s模型中进行训练,并保存训练过程中深度神经网络yolov5s模型中在所述验证集上检测准确率最高时的权重参数,并将该权重文件命名为best.pt;
37、通过所述权重文件best.pt的权重对所述测试集的图像进行测试,得到检测效果。
38、进一步地,步骤3中,所述第一图像的数量为1216张,按照训练集:验证集:测试集=7:2:1进行划分,得到训练集851张,验证集243张,测试集122张。
39、与现有技术相比,本发明的有益效果是:
40、1.本发明提供一种基于深度神经网络的焊缝x射线图像缺陷检测与识别方法,采用该方法在检测之前对数据进行中值滤波处理,可以在一定程度上消除孤立的噪声点,可以保持图像特征的同时不会产生过度模糊。解决了现有技术存在对工程师的要求较高、对质量较差的x射线检测图像会出现错检率和漏检率高的问题。
41、2.本发明提供一种基于深度神经网络的焊缝x射线图像缺陷检测与识别方法,通过在模型的neck层引入超轻量化注意力机制eca,平衡了模型的性能和复杂性。eca模块仅包含较少的参数,但可以带来较大的性能提升,同时能够避免过拟合现象的发生。
- 还没有人留言评论。精彩留言会获得点赞!