一种基于改进yolov5算法的车牌识别系统
本发明涉及安防监控,具体来说,涉及一种基于改进yolov5算法的车牌识别系统。
背景技术:
1、随着现代社会经济的快速发展和人们生活水平的提高,汽车作为一种必需品已经走进千家万户。汽车数量的增长在给人们带来便利的同时,也引发了诸如交通堵塞等一系列交通问题。引入智能交通系统能够有效的缓解交通问题,其中对车牌的准确识别是必不可少的环节之一。车辆的车牌号码作为车辆的唯一“身份”标识,其具有重要的识别意义,车牌识别技术可以在车辆不作任何改动的情况下实现汽车“身份”的自动登记及验证,这项技术已经应用于公路收费、停车管理、称重系统、交通诱导、交通执法、公路稽查、车辆调度、车辆检测等各种场合中。
2、目前,传统的车牌识别技术vlpr(vehicle license plate recognition)主要包括前端和后端,前端负责图像采集,需要部署到车辆经过的道路处,对准车辆入口方向并调试好角度和方向。后端负责图像处理与识别结果的处理,其中图像处理的目的在于识别出车牌,主要的识别算法包括车牌的检测和车牌的识别,车牌检测是指从前端采集的图像中定位出车牌所在的位置,可采用灰度检测、边缘检测或者对象检测算法(有锚或者无锚算法),而车牌识别是其中的关键。因此,为了提高道路车流的车牌识别准确度,本发明提出了一种基于改进yolov5算法的车牌识别系统。
技术实现思路
1、针对相关技术中的问题,本发明提出一种基于改进yolov5算法的车牌识别系统,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
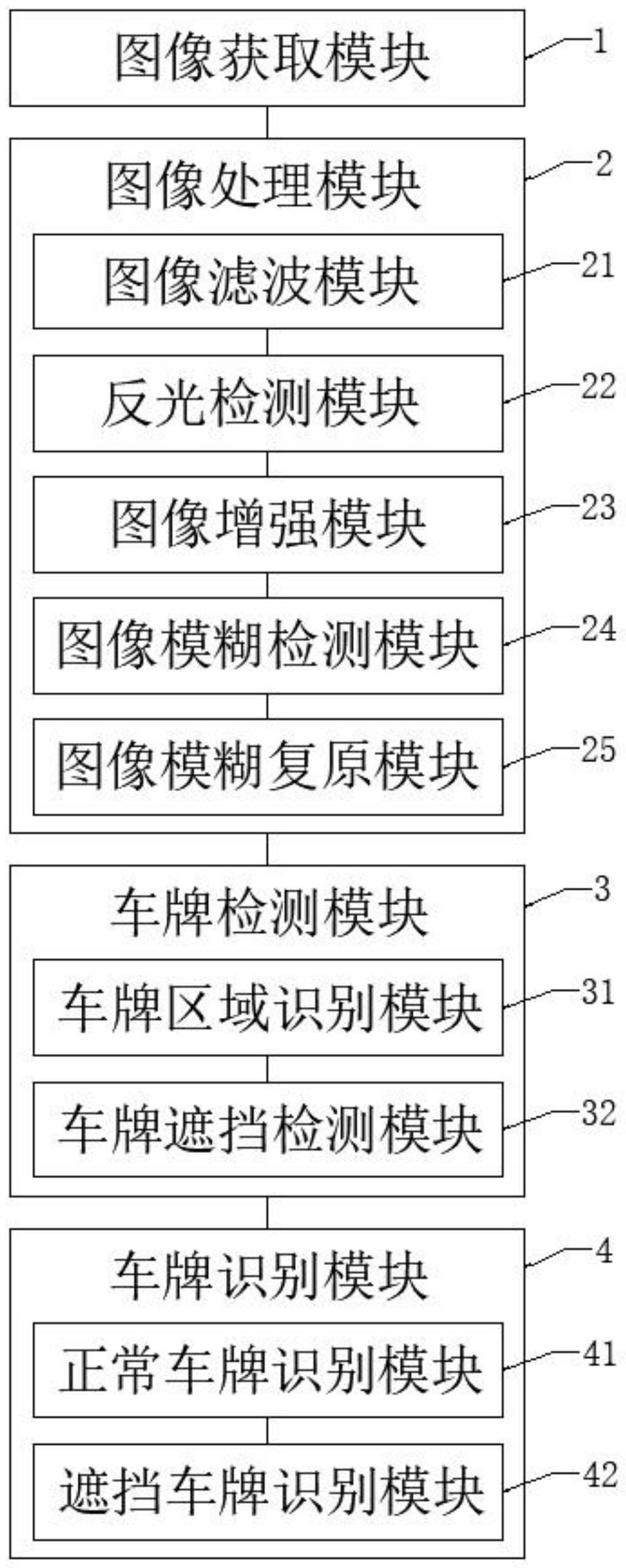
3、一种基于改进yolov5算法的车牌识别系统,该系统包括图像获取模块、图像处理模块、车牌检测模块及车牌识别模块;
4、其中,图像获取模块用于利用预设的摄像装置采集车辆的车牌图像;
5、图像处理模块用于对采集的车牌图像进行预处理;
6、车牌检测模块用于利用改进的yolov5模型对预处理后的车牌图像进行检测,得到包含车牌的区域,还用于判断车牌图像中是否出现车牌遮挡现象;
7、车牌识别模块用于利用车牌识别模型对预处理后的车牌图像中的车牌号进行识别,还用于利用相似度分析算法对遮挡的车牌图像中的车牌号进行识别。
8、进一步的,图像处理模块包括图像滤波模块、反光检测模块、图像增强模块、图像模糊检测模块及图像模糊复原模块;
9、其中,图像滤波模块用于利用中值滤波算法对采集的车牌图像进行滤波处理;
10、反光检测模块用于判断滤波后的车牌图像是否存在反光现象,并在出现反光时进行图像增强处理;
11、图像增强模块用于利用对比度调节算法对存在反光现象的车牌图像进行增强处理;
12、图像模糊检测模块用于利用预设的图像评价指标实现对车牌图像的模糊检测,并在车牌图像存在模糊时进行复原处理;
13、图像模糊复原模块用于利用基于贝叶斯原理的非线性图像复原算法对模糊车牌图像进行复原。
14、进一步的,图像模糊检测模块包括边缘锐度值计算模块、图像评价指标设定模块及图像模糊判断模块;
15、其中,边缘锐度值计算模块用于利用差分乘积思想结合基于四领域改进的eav算法计算边缘锐度值;
16、差分乘积思想结合基于四领域改进的eav算法的计算公式为:
17、
18、式中,eav表示边缘锐度值,f(x,y)表示车牌图像中像素点的灰度值,(x,y)表示坐标点,m和n分别表示车牌图像的长和宽;
19、图像评价指标设定模块用于利用计算得到的边缘锐度值设定车牌图像的评价指标;
20、图像模糊判断模块用于利用车牌图像的评价指标实现对车牌图像是否模糊的判断。
21、进一步的,图像评价指标设定模块在利用计算得到的边缘锐度值设定车牌图像的评价指标时包括:
22、获取计算得到的边缘锐度值,并绘制边缘锐度值与模糊程度的关系曲线;
23、通过分析关系曲线的变化来建立量化关系,并结合图像主观评价的分析制定出基于eav的图像质量评价指标,对车牌图像质量的主观评价进行指标量化。
24、进一步的,图像模糊复原模块包括模糊尺寸估计模块及图像复原模块;
25、其中,模糊尺寸估计模块用于利用基于改进的radon变换和倒谱法实现对车牌图像模糊尺度的估计;
26、图像复原模块用于利用基于贝叶斯原理的非线性图像复原算法结合预设的迭代次数选取策略对模糊车牌图像进行复原。
27、进一步的,模糊尺寸估计模块包括运动模糊角度估计模块及运动模糊长度估计模块;
28、其中,运动模糊角度估计模块用于利用基于形态学改进的radon变换法对车牌图像进行模糊角度估计;
29、运动模糊长度估计模块用于利用基于多级判断改进的倒谱法对车牌图像进行模糊长度估计。
30、进一步的,图像复原模块在利用基于贝叶斯原理的非线性图像复原算法结合预设的迭代次数选取策略对模糊车牌图像进行复原时包括:
31、利用基于贝叶斯原理的非线性图像复原算法根据估计的模糊尺度对模糊车牌图像进行复原,并根据预设的迭代次数得到复原的车牌图像;
32、其中,迭代次数的迭代公式为:
33、
34、式中,f(x,y)k表示原始清晰车牌图像的第k次迭代估计结果,h(x,y)表示所用到估计出的模糊核,g(x,y)表示运动模糊车牌图像,*表示卷积运算。
35、进一步的,车牌检测模块包括车牌区域识别模块及车牌遮挡检测模块;
36、其中,车牌区域识别模块用于利用改进的yolov模型对预处理后的车牌图像进行检测,得到包含车牌的区域;
37、车牌遮挡检测模块用于基于深度学习技术训练得到遮挡检测模型来实现对车牌图像中是否出现车牌遮挡现象的检测。
38、进一步的,车牌识别模块包括正常车牌识别模块及遮挡车牌识别模块;
39、其中,正常车牌识别模块用于利用车牌识别模型对预处理后的车牌图像中的车牌号进行识别;
40、遮挡车牌识别模块用于利用相似度分析算法对遮挡的车牌图像中的车牌号进行识别。
41、进一步的,遮挡车牌识别模块在利用相似度分析算法对遮挡的车牌图像中的车牌号进行识别时包括:
42、获取处理后的遮挡车牌的图像,并根据该图像获取对应的驾驶员图像;
43、利用图像识别技术对驾驶员的身份进行识别,并根据该驾驶员的身份信息获取其名下的车牌信息;
44、利用相似度算法计算遮挡车牌与该驾驶员名下车牌的相似度;
45、根据预设的车牌相似度阈值判断遮挡车牌是否为该驾驶员名下的车牌,若是,则将该驾驶员名下的已知车牌作为该遮挡车牌的车牌号,若否,则执行下一步:
46、获取遮挡车牌的车辆图像作为目标车辆,并提取目标车辆的标识信息及目标车辆的当前位置信息;
47、获取目标车辆预设范围及时间内的车辆图像信息作为样本车辆,并根据相似度算法计算目标车辆与样本车辆之间的第一相似度,再计算目标车辆中驾驶员与样本车辆中驾驶员的第二相似度;
48、利用预设置信度结合第一相似度及第二相似度计算目标车辆与样本车辆之间的综合相似度,其中,综合相似度=第一相似度*(1-n)+第二相似度*n,n为预先设定的置信度百分比,其取值范围为50%~90%;
49、将目标车辆与样本车辆的综合相似度值由高至低进行排序,得到综合相似度值最大的样本车辆即为目标车辆,并根据该样本车辆对应的驾驶员信息分析得到其名下的车牌号,即遮挡的车牌号。
50、本发明的有益效果为:
51、1)通过图像获取模块、图像处理模块、图像检测模块及车牌识别模块的配合使用,从而不仅可以在图像处理模块的作用下依次对获取的车牌图像进行滤波、反光增强及模糊复原处理,有效地降低图像噪声、反光及模糊状况对车牌识别的影响,为后续车牌的精确识别提供了有效地保障,而且还可以在车牌检测模块的作用下利用改进的yolov5模型及遮挡检测模型分别实现对车牌区域的识别及车牌遮挡现象的检测,同时还可以在车牌识别模块的作用下利用车牌识别模型及相似度分析算法分别实现对正常车牌图像及遮挡车牌图像中车牌号的识别,相比于传统的车牌识别技术,本发明不仅可以实现对车牌图像的滤波、反光增强及模糊复原处理,而且还可以实现对车牌区域及车牌遮挡现象的检测及识别,同时还可以实现对遮挡车牌和非遮挡车牌的识别,有效地提高了车牌的识别准确率。
52、2)通过利用差分乘积思想结合基于四领域改进的eav算法来计算边缘锐度值,并结合设定的图像评价指标实现对车牌图像中运动模糊的有效地检测,从而可以有效地提高模糊检测的灵敏度及效率,通过用基于改进的radon变换和倒谱法实现对车牌图像模糊尺度的估计,并利用基于贝叶斯原理的非线性图像复原算法对模糊车牌图像进行复原,从而可以有效地提升图像的复原效果。
53、3)通过利用驾驶员图像的分析可以得到该驾驶员名下对应的车牌信息,并基于该车牌信息与遮挡车牌的相似度比较可以实现对遮挡车牌的初次识别,当初始识别不能实现对遮挡车牌的识别时,则可以利用预设范围及时间内的车辆图像与遮挡车牌图像的相似度比较得到车辆相似度及驾驶员相似度,并结合预设的置信度来实现综合相似度的计算,从而可以基于综合相似度的排序来实现对遮挡车牌号的识别,可以更好地满足于车牌的识别需求。
- 还没有人留言评论。精彩留言会获得点赞!