眼前节OCT图像处理方法与流程
本发明涉及图像处理,尤其涉及一种眼前节oct图像处理方法。
背景技术:
1、光学层析成像技术(optical coherence tomography,oct)在眼科领域应用广泛。基于眼前节组织光学层析图像,通过提取眼组织边缘轮廓特征角点进而计算倾斜角,进一步地测量角膜曲率、中央角膜厚度等,在眼科疾病的临床诊断中发挥重要的作用。其中,对特征角点的提取和倾斜角的计算是必要前提。
2、目前现有技术对眼前节oct图像的背景噪声干扰(如房水等)和眼前节oct图像的低信噪比区域,如远心扫描模式导致的角膜两侧信号弱、中央过饱和伪影,采用对整张图像进行处理以确定眼前节组织边缘轮廓的处理方法,处理速度较慢,而且提取的特征角点数量少导致倾斜角计算精度不高,降低了眼前节组织测量角膜曲率、中央角膜厚度的测量精确性和快速性,无法同时满足眼科疾病的临床精确性和实时性的要求。
技术实现思路
1、有鉴于此,有必要提供一种眼前节oct图像处理方法,其能够实现非整张图像进行处理以确定眼前节组织边缘轮廓。
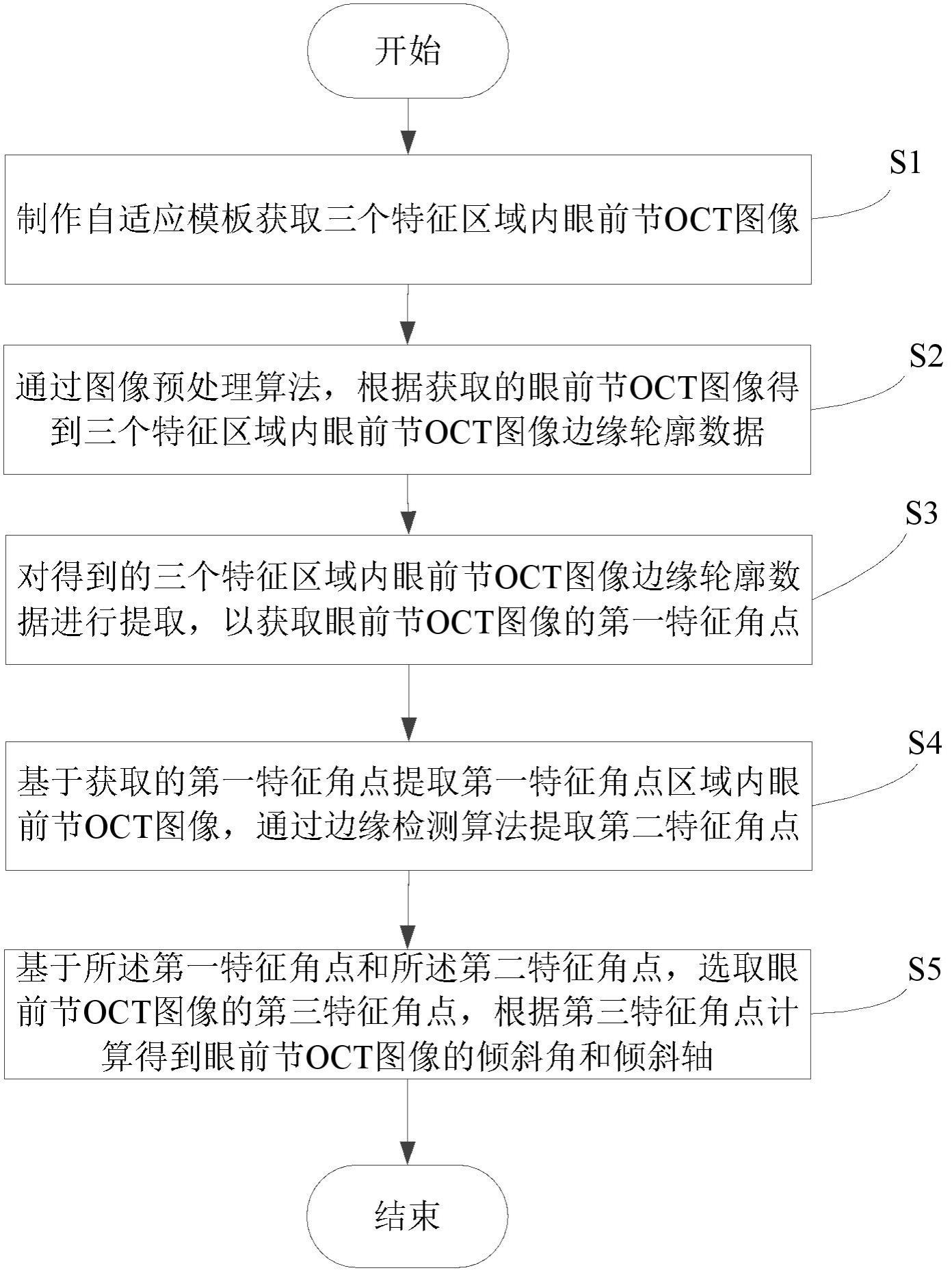
2、本发明提供一种眼前节oct图像处理方法,该方法包括如下步骤:s1,制作自适应模板获取三个特征区域内眼前节oct图像;s2,通过图像预处理算法,根据获取的眼前节oct图像得到三个特征区域内眼前节oct图像边缘轮廓数据;s3,对得到的三个特征区域内眼前节oct图像边缘轮廓数据进行提取,以获取眼前节oct图像的第一特征角点;s4,基于获取的所述第一特征角点提取第一特征角点区域内眼前节oct图像,通过边缘检测算法提取第二特征角点;s5,基于所述第一特征角点和所述第二特征角点,选取眼前节oct图像的第三特征角点,根据所述第三特征角点计算得到眼前节oct图像的倾斜角和倾斜轴。
3、具体地,所述的步骤s1包括:
4、步骤s11,基于人眼眼球结构选取三个特征区域,所述三个特征区域包括:眼白到虹膜到瞳孔区域、瞳孔中心区域、瞳孔到虹膜到眼白区域;
5、步骤s12,在眼前节oct图像像素坐标系下制作三个特征区域自适应模板。
6、具体地,所述的步骤s2包括:
7、步骤s21,将眼前节oct图像与三个特征区域自适应模板进行图像与操作得到三个特征区域内眼前节oct图像用表示,其中;
8、步骤s22,进行图像预处理算法,包括对三个特征区域内眼前节oct图像进行图像增强、图像卷积、二值化、轮廓提取,得到三个特征区域内眼前节oct图像边缘轮廓图像用及三个特征区域内眼前节oct图像边缘轮廓。
9、具体地,所述的步骤s3包括:
10、步骤s31,制作眼白到虹膜到瞳孔特征区域自适应模板,制作瞳孔到虹膜到眼白特征区域自适应模板;
11、步骤s32,通过图像与运算即得到眼白到虹膜到瞳孔特征区域内眼前节oct图像边缘轮廓图像,通过图像与运算即得到瞳孔到虹膜到眼白特征区域内眼前节oct图像边缘轮廓图像;
12、步骤s33,通过轮廓填充得到眼白到虹膜到瞳孔特征区域内眼前节oct图像的轮廓填充图像,通过轮廓填充得到瞳孔到虹膜到眼白特征区域内眼前节oct图像的轮廓填充图像;
13、步骤s34,在眼白到虹膜到瞳孔特征区域内眼前节oct图像的轮廓填充图像中,找到列y的最小值与最大值,即、,通过填充列得到眼白到虹膜到瞳孔特征区域内眼前节oct图像的最大最小值填充轮廓图像;在瞳孔到虹膜到眼白特征区域内眼前节oct图像边缘轮廓图像中,找到列y的最小值与最大值,即、,通过填充列得到瞳孔到虹膜到眼白特征区域内眼前节oct图像的最大最小值填充轮廓图像;
14、步骤s35,通过图像减操作即得到眼白到虹膜到瞳孔特征区域内眼前节oct图像边缘的内部轮廓图像;通过图像减操作即得到瞳孔到虹膜到眼白特征区域内眼前节oct图像边缘的内部轮廓图像;
15、步骤s36,通过对眼白到虹膜到瞳孔特征区域内眼前节oct图像边缘的内部轮廓图像进行最大面积轮廓提取,得到其轮廓数据点,并选取行x最小的像素坐标作为角膜左第一特征角点,并选取列y最大的像素坐标作为晶体左第一特征角点;
16、步骤s37,通过对瞳孔到虹膜到眼白特征区域内眼前节oct图像边缘的内部轮廓图像进行最大面积轮廓提取,得到其轮廓数据点,并选取行x最大的像素坐标作为角膜右第一特征角点,并选取列y最大的像素坐标作为晶体右第一特征角点。
17、具体地,所述第一特征角点包括:角膜左第一特征角点、晶体左第一特征角点、角膜右第一特征角点、晶体右第一特征角点。
18、具体地,所述的步骤s4包括:
19、步骤s41,以第一特征角点为中心,提取得到第一特征角点区域眼前节oct图像;
20、步骤s42,通过图像边缘提取算法得到第一特征角点区域眼前节oct图像的边缘轮廓数据:其中,所述图像边缘提取算法包括图像增强、高斯差分、形态学边缘提取、最大面积轮廓提取;
21、步骤s43,提取出眼前节oct图像的特征角点,称为第二特征角点。
22、具体地,所述第一特征角点区域眼前节oct图像包括:以角膜左第一特征角点为中心提取出角膜左第一特征角点区域眼前节oct图像,以角膜右第一特征角点为中心提取出角膜右第一特征角点区域眼前节oct图像,以晶体左第一特征角点为中心提取出晶体左第一特征角点区域眼前节oct图像,以晶体右第一特征角点为中心提取出晶体右第一特征角点区域眼前节oct图像。
23、具体地,所述第一特征角点区域眼前节oct图像的边缘轮廓数据包括:角膜左第一特征角点区域眼前节oct图像轮廓数据、角膜右第一特征角点区域眼前节oct图像轮廓数据、晶体左第一特征角点区域眼前节oct图像轮廓数据、晶体右第一特征角点区域眼前节oct图像轮廓数据。
24、具体地,所述步骤s43包括:
25、在角膜左第一特征角点区域眼前节oct图像轮廓数据中选取列y最大的像素坐标作为角膜左第二特征角点,在晶体左第一特征角点区域眼前节oct图像轮廓数据中选取列y最大的像素坐标作为晶体左第二特征角点,在角膜右第一特征角点区域眼前节oct图像轮廓数据中选取列y最大的像素坐标作为角膜右第二特征角点,在晶体右第一特征角点区域眼前节oct图像轮廓数据中选取列y最大的像素坐标作为晶体右第二特征角点。
26、具体地,所述的步骤s5包括:
27、步骤s51,在第一特征角点和第二特征角点中,通过对比分析选取眼前节oct图像的特征角点,称为第三特征角点,在角膜左第一特征角点、角膜左第二特征角点中,选取行x较小的像素坐标作为角膜左第三特征角点;在角膜右第一特征角点、角膜右第二特征角点中,选取行x较大的像素坐标作为角膜右第三特征角点;在晶体左第一特征角点、晶体左第二特征角点中,选取x较小的像素坐标作为晶体左第三特征角点;在晶体右第一特征角点、晶体右第二特征角点中,选取x较大的像素坐标作为晶体右第三特征角点;第三特征角点包括:角膜左第三特征角点、晶体左第三特征角点、角膜右第三特征角点、晶体右第三特征角点;
28、步骤s52,采用倾斜角计算方法,得到眼前节oct图像的倾斜角和倾斜轴:计算以角膜左第三特征角点、角膜右第三特征角点组成线段的垂直平分线作为倾斜轴1,计算以角膜左第三特征角点、角膜右第三特征角点组成线段的倾斜角作为倾斜角1;计算以晶体左第三特征角点、晶体右第三特征角点组成线段的垂直平分线作为倾斜轴2,计算以晶体左第三特征角点、晶体右第三特征角点组成线段的倾斜角作为倾斜角2;
29、步骤s53,将倾斜角1和倾斜角2求平均值即为眼前节oct图像的倾斜角,计算得到倾斜轴1和倾斜轴2的交点,经过该交点斜率为所述倾斜角的直线即为倾斜轴。
30、本发明基于自适应模板,实现了非整张图像进行处理以确定眼前节组织边缘轮廓的处理方法,能够提取出数量多的特征角点进而提高倾斜角计算精度,提高了眼前节组织测量角膜曲率、中央角膜厚度的测量精确性和快速性,实现了眼科疾病的临床精确性和实时性。
- 还没有人留言评论。精彩留言会获得点赞!