一种基于图像识别的桥梁拼接遥感控制系统及方法与流程
本发明涉及图像及遥感控制,尤其涉及一种基于图像识别的桥梁拼接遥感控制系统及方法。
背景技术:
1、近年来,我国经济的发展带动了交通事业的蓬勃发展;同时,人员和物资的频繁流动也使得交通需求激增。
2、完全靠新建公路去缓解交通拥挤代价过大,因此对早期公路进行加宽改造,提高其道路等级及通行能力,是一种切实可行的途径。因此国内对早期公路及桥梁进行了大规模的拓宽改扩建工程,如2010年竣工的郑州—洛阳高速公路、泉州—厦门高速公路、京港澳高速公路,2011年竣工的西安—宝鸡高速公路、柳州—南宁高速公路,2015年竣工的长春—四平高速公路等,这些高速公路改扩建均由建造初期的四车道改为八车道。高速公路的改扩建涉及了道路、桥涵等构造物的改扩建,道路工程的改扩建一般在原有道路两边或一边进行加宽处理,而桥涵构造物的改扩建不仅要面临新旧桥梁的拼接问题还需要考虑原有桥涵的承载能力是否满足需求等技术难题,因此桥涵工程的改扩建较为复杂。
3、随着无人机遥感技术的飞速发展,无人机应用已经渗透到各行各业,将无人机遥感技术应用在桥梁检测上,能提高桥梁检测的效率和保障桥检人员安全。在桥梁检测中,无人机通过携带的成像设备,可以对桥梁损坏情况进行高精度的拍摄,对获得的桥梁结构表面图像特征进行分析,得出桥梁的病害程度。无人机进行高空作业优点颇多,无人机机体的构造比较简单,质量轻,体积小,运输和维护比较容易,操作方便;无人机搭乘测量部件在空中进行工作,机动性能好,安全稳定,成本相对较低;重要的是利用无人机遥感技术进行桥梁检测,避免使用了桥检车载人平台降低了检测风险。可见,无人机在桥梁检测上的应用意义重大。
4、但是无人机在桥梁检测中采集桥梁拼接的可能存在的问题图像时,由于目标区域面积往往较大,无人机携带的传感器受到焦距和飞行角度等的限制,所获取的单幅图像覆盖范围较小,无法覆盖所需的整个区域。现有技术是对问题图像进行图像拼接技术进行超视角的全景拼接的方式,虽然有相应的空间变换的算法然而图像拼接技术还是可能导致具体检测点坐标不准确问题。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明公开了一种基于图像识别的桥梁拼接遥感控制方法,所述桥梁拼接遥感控制方法包括如下步骤:
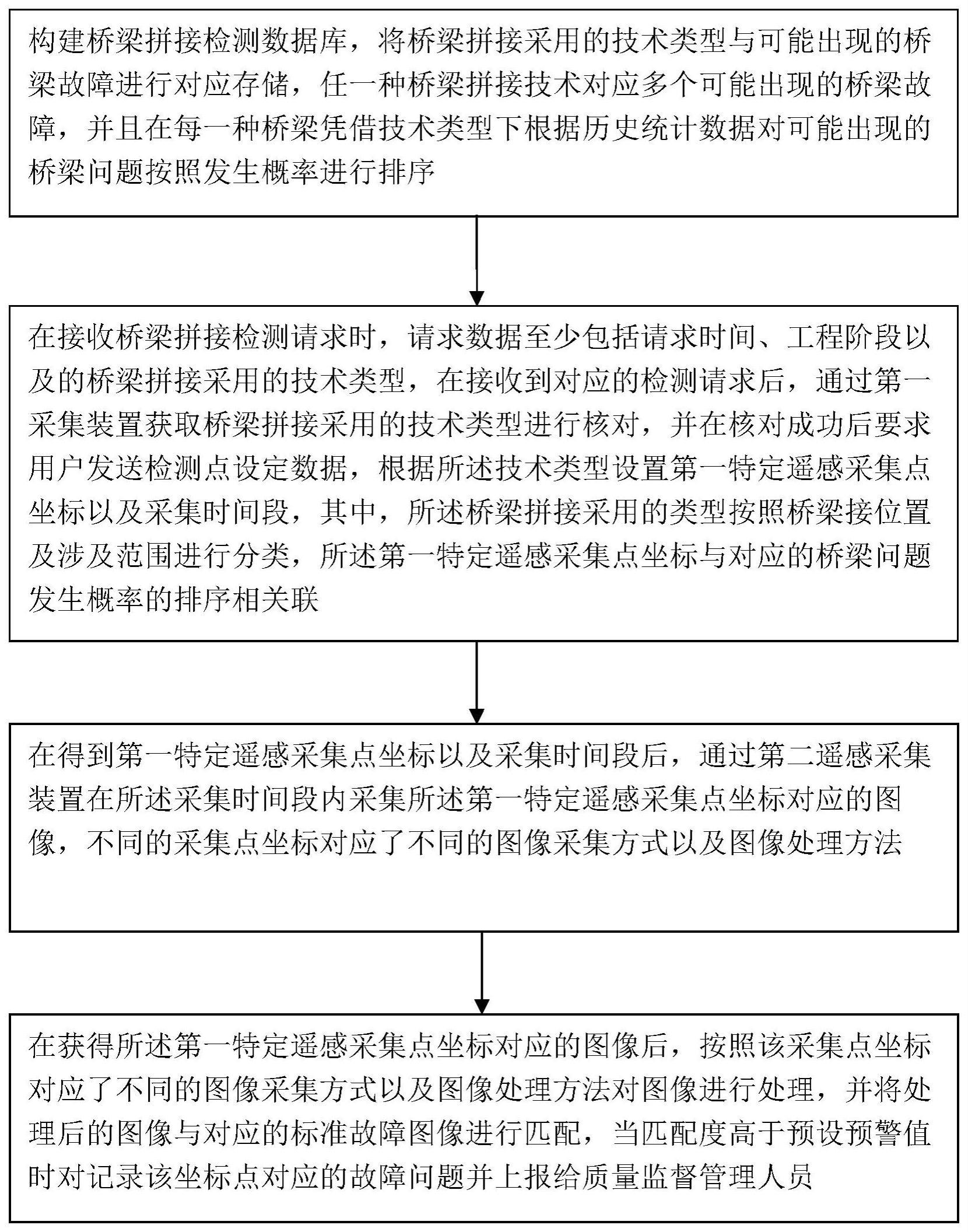
2、步骤1,构建桥梁拼接检测数据库,将桥梁拼接采用的技术类型与可能出现的桥梁故障进行对应存储,任一种桥梁拼接技术对应多个可能出现的桥梁故障,并且在每一种桥梁凭借技术类型下根据历史统计数据对可能出现的桥梁问题按照发生概率进行排序;
3、步骤2,在接收桥梁拼接检测请求时,请求数据至少包括请求时间、工程阶段以及的桥梁拼接采用的技术类型,在接收到对应的检测请求后,通过第一采集装置获取桥梁拼接采用的技术类型进行核对,并在核对成功后要求用户发送检测点设定数据,根据所述技术类型设置第一特定遥感采集点坐标以及采集时间段,其中,所述桥梁拼接采用的类型按照桥梁接位置及涉及范围进行分类,所述第一特定遥感采集点坐标与对应的桥梁问题发生概率的排序相关联;
4、步骤3,在得到第一特定遥感采集点坐标以及采集时间段后,通过第二遥感采集装置在所述采集时间段内采集所述第一特定遥感采集点坐标对应的图像,不同的采集点坐标对应了不同的图像采集方式以及图像处理方法;
5、步骤4,在获得所述第一特定遥感采集点坐标对应的图像后,按照该采集点坐标对应了不同的图像采集方式以及图像处理方法对图像进行处理,并将处理后的图像与对应的标准故障图像进行匹配,当匹配度高于预设预警值时对记录该坐标点对应的故障问题并上报给质量监督管理人员。
6、更进一步地,所述通过第一遥感采集装置获取桥梁拼接采用的技术类型进行核对进一步包括:不同的施工阶段对应了不同的检测桥梁拼接类型的特定监测位置,首先,根据请求收据中包含的工程阶段数据确定采集图像的具体位置,实时采集桥梁的施工阶段对应的特定位置的图像数据,对该图像数据进行数据处理后,再与在请求数据中包括的工程阶段对应的标准桥梁拼接特定位置的图像的对比,在图像相似度匹配程度达到第一预设值时,认定接收到的桥梁拼接检测请求中包括的桥梁拼接采用的技术类型为正确值。
7、更进一步地,所述桥梁拼接采用的类型按照桥梁接位置及涉及范围进行分类进一步包括:将桥梁拼接类型分为三种类型,第一类型为上下部结构均不连接,第二类型为上下部结构均连接,以及第三类型为上部结构连接而下部结构不连接。
8、更进一步地,所述检测点设定数据为用户选择反馈的桥梁采用的技术类型对应的故障问题发生的概率阈值或者为排序阈值,当接收的检测点设定数据为故障问题发生的概率阈值时,仅设定可能发生的故障问题概率大于所述概率阈值的故障问题对应坐标数据为第一特定遥感采集点坐标,而当接收的检测点设定数据为故障问题的排序阈值时,仅设定可能发生的故障问题排序中高于所述排序阈值的故障问题对应坐标数据为第一特定遥感采集点坐标。
9、更进一步地,所述不同的采集点坐标对应了不同的图像采集方式以及图像处理方法进一步包括:不同故障问题对应的图像内容不同,因此对不同故障采集的图像设置有不同侧重点的图像滤波器模板,并根据不同的滤波器模板进行图像的初步滤波后,提取图像中的特征点,通过金字塔图像来构建多层尺度空间,在尺度空间内部搜索和确定特征点,将特征点一定范围内梯度的主方向,作为该点的方向,用于保持特征点对尺度和旋转的一致性,然后根据关键点的邻域梯度信息描述特征点。
10、更进一步地,不同的桥梁问题包括:桥面铺装层破损问题、伸缩缝损坏问题、桥梁板结构开裂问题、桥梁支撑座故障问题中的一种或者多种,每一种不同的桥梁拼接技术类型导致可能发生的故障问题的概率不一样。
11、更进一步地,将所述将处理后的图像与对应的标准故障图像进行匹配进一步包括:将图像中所有提取到的特征点描述子集合构建在k-d树结构上,首先建立根节点,将图像的特征点集的描述子作为根节点的内容,在特征描述符中计算方差最大的维度作为分割维,再将最大的维度数据按照大小排序,寻找该维度数据上的中间值q,以此中间值作为分界线,把特征描述符集分为两部分。其中小于此中间值的特征描述符放在树根左子树,大于中间值的特征描述符放在树根子树,再以根节点的左右子树为新树,迭代上面步骤,当每个节点下面只有一个叶子节点时截止,以此简化与对应的标准故障图像进行匹配的特征点数量。
12、更进一步地,第一采集装置为固定位置的图像采集装置。
13、更进一步地,第二遥感采集装置为遥感无人机。
14、本发明还公开了一种基于图像识别的桥梁拼接遥感控制系统,所述系统包括存储器、第一采集装置、第二遥感采集装置以及进行数据处理的处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述中任一项所述方法的步骤。
15、本发明与现有技术相比,有益效果为:第一、本发明不同类型的桥梁拼接方法可能对应出现的故障进行针对性的检测,按照可能发生问题的概率进行排序,并允许使用者自行定义检测的等级,即选择监控的坐标点,在选择监控的坐标点后以及对应的监控时间后,转换为无人机控制数据(无人机位置、摄像头角度等)对无人机进行控制,控制无人机对特定坐标位置进行图像采集,优化监控位置的选择而不需要进行图像的超范围拼接对比,第二、本发明对将桥梁拼接的类型与可能发生的故障相关联,对不同的故障设定不同的检测点,不同的检测点对应了不同的图像处理方法,例如对于桥面故障的检测需要对平面的图像纹理进行突出,匹配桥面裂纹的类型及程度,而对于结构故障的检测则需要对选择结构部件作为特征点进行分析对比,另外,本发明设置了工程数据校验的方式,基于请求数据提交的类型进行校验以保证接下来的分析更加准确,本发明更进一步地为了降低成本设置两个遥感监测方式,一个固定的图像采集点用于确定桥梁的拼接类型,一个可以移动的无人机采集特定位置的图像,有效的保证监测点图像采集的同时降低了使用费用和成本。
- 还没有人留言评论。精彩留言会获得点赞!