用于3D工业相机的图像智能去噪方法与流程
本发明涉及图像数据处理,具体涉及一种用于3d工业相机的图像智能去噪方法。
背景技术:
1、普通的彩色相机拍摄到的图像能够记录拍摄场景内的所有物体,但彩色相机所拍摄到的图像不包含这些物体距离相机的距离,仅能通过图像语义分析来判断物体的远近,对应的距离数据较为模糊。而三维(3-dimensional)即3d工业相机由于能够准确的检测出拍摄空间的距离信息,使得3d工业相机在人脸识别、三维测量、环境感知、三维地图重建等各个技术领域广泛应用。但是由于传感器本身硬件设备的限制和采集环境外界光源的干扰等影响因素,导致3d工业相机所拍摄到的三原色加距离图像(rgb+depth map)即rgbd图像中包含大量噪声。所以为了使得3d工业相机所拍摄到的rgbd图像信息更加准确,需要对所拍摄到的图像进行去噪。
2、在通过现有去噪算法设置滤波窗口对rgbd图像进行去噪时,由于3d工业相机的工作原理,外界环境光对rgbd图像的影响与随机噪声对rgbd图像的影响不同,造成其拍摄到的rgbd图像中的图像信息受到多方面噪声的影响,可能出现由于滤波窗口大小选择不当,导致噪声不能准确滤除或误将有效数据滤除使得纹理细节丢失严重等问题使得去噪的效果较差。
技术实现思路
1、为了解决现有去噪算法设置滤波窗口对rgbd图像去噪效果较差的技术问题,本发明的目的在于提供一种用于3d工业相机的图像智能去噪方法,所采用的技术方案具体如下:
2、本发明提出了一种用于3d工业相机的图像智能去噪方法,所述方法包括:
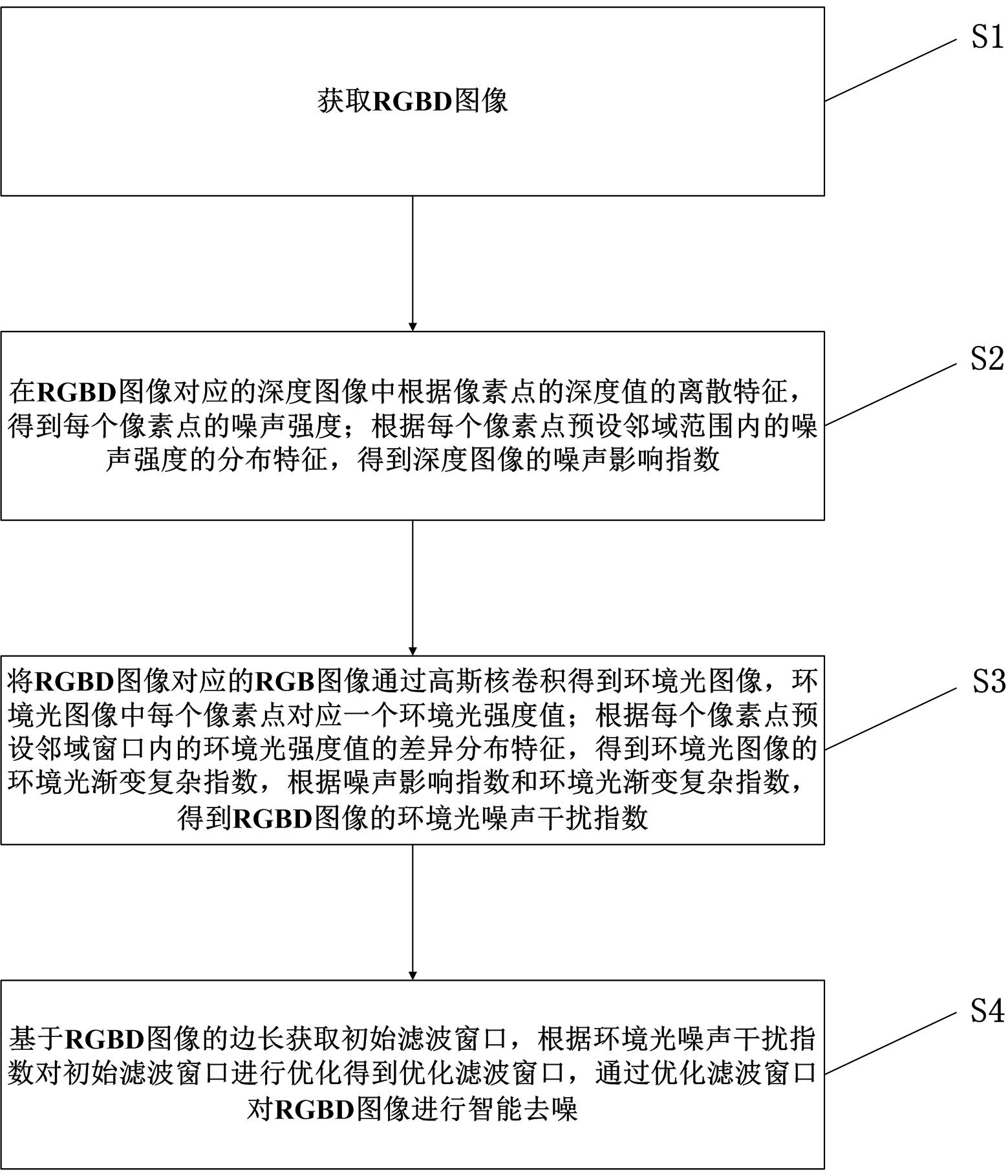
3、获取rgbd图像;
4、在rgbd图像对应的深度图像中根据像素点的深度值的离散特征,得到每个像素点的噪声强度;根据每个像素点预设邻域范围内的噪声强度的分布特征,得到深度图像的噪声影响指数;
5、将rgbd图像对应的rgb图像通过高斯核卷积得到环境光图像,所述环境光图像中每个像素点对应一个环境光强度值;根据每个像素点预设邻域窗口内的环境光强度值的差异分布特征,得到环境光图像的环境光渐变复杂指数,根据所述噪声影响指数和所述环境光渐变复杂指数,得到rgbd图像的环境光噪声干扰指数;
6、基于所述rgbd图像的边长获取初始滤波窗口,根据所述环境光噪声干扰指数对初始滤波窗口进行优化得到优化滤波窗口,通过优化滤波窗口对所述rgbd图像进行智能去噪。
7、进一步地,所述噪声强度的获取方法包括:
8、将所述深度图像划分为预设第一数量个形状大小相同的图像块,在每个图像块中通过孤立森林算法根据每个像素点的深度值计算对应的异常值分数,将每个像素点的异常值分数作为对应的噪声强度。
9、进一步地,所述噪声影响指数的获取方法包括:
10、将所述噪声强度按数值大小平均划分为预设第二数量个噪声强度等级,根据噪声强度等级获取像素点的连通域;任选一个像素点作为目标像素点,在目标像素点预设邻域范围内以噪声强度等级为行、以连通域面积为列构建初始噪声区域大小矩阵,所述初始噪声区域大小矩阵中的每个元素的元素值表征同一噪声强度等级和同一连通域面积的出现次数;
11、将所述初始噪声区域大小矩阵中的每个元素的元素值进行归一化,得到最终噪声区域大小矩阵,所述最终噪声区域大小矩阵中每个元素的元素值为同一噪声强度等级和同一连通域面积的出现次数的归一化值;将每个元素的元素值、对应的噪声强度等级和对应的连通域面积之间的乘积,作为每个元素的噪声特征值,将每个元素的噪声特征值累加得到目标像素点对应的噪声影响程度;
12、改变目标像素点得到所有像素点对应的噪声影响程度,将所有像素点对应的噪声影响程度累加,得到深度图像的噪声影响指数。
13、进一步地,所述环境光图像的获取方法包括:
14、基于rgb图像中每个像素点的像素值,将每个像素点作为预设高斯核的中心进行卷积,得到每个像素点对应的环境光照射分量,将每个像素点的环境光照射分量作为对应的环境光强度值,将环境光强度值替代所述rgb图像中每个像素点的像素值,得到环境光图像。
15、进一步地,所述环境光渐变复杂指数的获取方法包括:
16、在环境光图像中任选一个像素点作为中心像素点,将所述中心像素点预设邻域窗口内其他像素点作为邻域像素点;
17、将每个邻域像素点与中心像素点之间对应的环境光强度值差异,作为每个邻域像素点对应的环境光强渐变值;将中心像素点指向每个邻域像素点对应的方向与水平面的夹角,作为每个邻域像素点的参考角度;根据环境光强渐变值和参考角度得到中心像素点的环境光强渐变均匀度;
18、改变中心像素点得到所有像素点对应的环境光强渐变均匀度,将所述环境光图像中所有像素点的环境光强渐变均匀度的累加值进行负相关映射,得到环境光图像的环境光渐变复杂指数。
19、进一步地,所述根据环境光强渐变值和参考角度得到中心像素点的环境光强渐变均匀度包括:
20、将每个邻域像素点对应的环境光强渐变值与参考角度的正弦值的乘积,作为每个邻域像素点的正弦影响渐变值;将每个邻域像素点对应的环境光强渐变值与参考角度的余弦值的乘积,作为每个邻域像素点的余弦影响渐变值;将所有邻域像素点对应的正弦影响渐变值的累加值和余弦影响渐变值的累加值的平方和进行开方后,通过负相关映射得到中心像素点的环境光强渐变均匀度。
21、进一步地,所述环境光噪声干扰指数的获取方法包括:
22、将所述噪声影响指数和所述环境光渐变复杂指数的乘积进行正相关映射,得到rgbd图像的环境光噪声干扰指数。
23、进一步地,所述初始滤波窗口的获取方法包括:
24、将所述rgbd图像边长通过预设缩放倍率进行缩放,得到初始滤波窗口边长,根据初始滤波窗口边长得到初始滤波窗口。
25、进一步地,所述优化滤波窗口的获取方法包括:
26、将所述环境光噪声干扰指数与初始滤波窗口边长的乘积作为优化滤波窗口边长,根据所述优化滤波窗口边长得到优化滤波窗口。
27、进一步地,所述根据噪声强度等级获取像素点的连通域包括:
28、将相邻且噪声强度等级相同的像素点合并,得到对应的连通域。
29、本发明具有如下有益效果:
30、考虑到3d工业相机通常依靠光线获取深度信息,所以rgbd图像中的深度信息会受到环境光因素的影响而产生噪声,又因为rgb图像中的颜色信息是根据物体对光线的反射能力来决定的,因此可通过rgbd图像中的颜色信息受到影响的程度,利用rgb图像估计深度图像受到环境光的影响情况得到环境光渐变复杂指数,并通过深度图像中噪声点不连续的特点得到噪声影响指数,进一步结合噪声影响指数和所述环境光渐变复杂指数来确定最优滤波窗口即优化滤波窗口,使得采用优化滤波窗口对图像进行去噪能够在最大程度上去除噪声的同时保留图像纹理细节,对应的去噪的效果更好。且本发明实施例在计算优化滤波窗口时能够根据不同的环境计算出不同大小的滤波窗口,从而实现对rgbd图像的自适应去噪,即本发明实施例通过获取优化滤波窗口对rgbd图像进行去噪的方法具有一定的适应性。综上所述,本发明通过获取优化滤波窗口对rgbd图像进行去噪的方法在去噪的效果更好的同时,具有良好的适应性。
- 还没有人留言评论。精彩留言会获得点赞!