一种基于自监督学习的目标识别方法及系统与流程
本发明属于目标识别领域,涉及自监督学习技术,具体是一种基于自监督学习的目标识别方法及系统。
背景技术:
1、目标识别是指一个特殊目标(或一种类型的目标)从其它目标(或其它类型的目标)中被区分出来的过程。它既包括两个非常相似目标的识别,也包括一种类型的目标同其他类型目标的识别。
2、现有技术中的目标识别一般都是通过训练模型进行识别,首选需要进行目标技术特征的提取,并建立训练模型,将训练模型输入神经网络模块或其他模型中,在将需要进行识别的信息通过神经网络识别的方式进行识别。
3、以上的识别方式需要依靠大量的训练数据,训练数据的获取过程需要浪费大量的人力和时间。
4、为此,本发明提出一种基于自监督学习的目标识别方法及系统。
技术实现思路
1、本技术的目的是提供一种基于自监督学习的目标识别方法及系统,用于解决现有技术识别过程中训练数据的采集需要浪费人力以及时间的问题,本发明将目标采集模块获取的确定含有的指定目标的第一记录视频中的数据作为分析样本,分析样本完全来源于待识别的数据样本中,通过对自身样本的预处理,对第一记录视频逐帧分解成灰度图像,获取处理帧集合,且对处理帧集合中的目标像素点进行分析值的计算,并结合处理帧集合中的所有图像帧进行平均值以及允差值的获取,获取分析值的判定范围;
2、而后对第二记录视频进行同样的预处理操作,将第二记录视频逐帧分解成灰度图像,目标分析模块对处理后的灰度图像进行像素化,并获取对应像素点的灰度值,任意选取像素点并获取临近像素点计算该像素点的分析值,且与平均值、允差值构成的区间进行比较判定是否为特征像素点,获取特征像素点对应的封闭曲线标记为指定目标轮廓,完成对指定目标的识别,无需进行样本的采集进而避免人力以及时间的浪费。
3、为实现上述目的,本技术的一个提供了一种基于自监督学习的目标识别系统,包括:目标采集模块、处理模块、目标分析模块以及数据存储模块;
4、所述目标采集模块用于获取第一记录视频以及第二识别视频;并将获取的第一记录视频和第二记录视频发送至处理模块;
5、所述处理模块用于对第一记录视频进行处理,包括:
6、将第一记录视频逐帧分解成灰度图像,处理图像分辨率;
7、判定当前帧是否为首帧图像或尾帧图像,并将首帧图像、中间帧图像……中间帧图像、尾帧图像标记为处理帧集合;将处理帧集合发送至目标分析模块;
8、所述处理模块还用于对第二记录视频进行处理,包括:
9、将第二记录视频逐帧分解成灰度图像,处理图像分辨率,并将灰度图像发送至目标分析模块;
10、所述目标分析模块用于对处理帧集合进行分析,过程包括:
11、目标分析模块获取处理帧集合内任意帧图像中像素点的像素灰度值,并将像素点的灰度值标记为hdj(x,y),其中的j表示处理帧集合内单帧图像的编号,j=1,2……m;(x,y)表示像素点的坐标值;
12、目标分析模块获取指定目标的轮廓,并将目标的轮廓边缘像素点标记为目标像素点;目标分析模块获取目标像素点的临近像素点;
13、目标分析模块利用计算公式计算目标像素点的分析值fxj(x,y),其中,目标像素点的分析值fxj(x,y)的计算方式为:
14、,
15、式中,s表示临近像素点的编号,s表示临近像素点的总数,表示影响因子;∈(0,1);
16、目标分析模块获取单帧图像内所有目标像素点的分析值fxj(x,y)计算平均值标记为fxj,并获取处理帧集合对应的分析值集合f(fx1、fx2……fxm);目标分析模块获取分析值集合f内fxj的数值大小,并分别获取最大值、最小值以及平均值;
17、并取最大值与平均值的差值和最小值与平均值的差值的中间值作为允差值;将平均值以及允差值发送至数据存储模块;
18、所述目标分析模块还用于对处理后的灰度图像进行像素化,并获取对应像素点的灰度值;
19、选取任意像素点,并获取该像素点对应的临近像素点;目标分析模块利用计算公式计算该像素点的分析值fxz(x,y);
20、当分析值fxz(x,y)∈(平均值-允差值,允差值+平均值)时,将该像素点标记为特征像素点,获取特征像素点对应的封闭曲线标记为指定目标轮廓,完成对指定目标的识别。
21、优选地,所述目标采集模块内包含多个视频采集设备,所述视频采集设备包括高清摄像头和动作云台。
22、优选地,所述第一记录视频内包含需要进行识别的指定目标,且第一记录视频为由rgb相机获取的三通道场景视频。
23、优选地,首帧图像为指定目标首次出现的图像帧,尾帧图像为指定目标首先消失的图像帧。
24、优选地,临近像素点的选取方式包括:
25、以目标像素点为中心,获取与目标像素点直接接触的像素点并标记为临近像素点。
26、优选地,分析值fxz(x,y)的计算方式为:
27、,
28、式中,s表示临近像素点的编号,s表示临近像素点的总数,表示影响因子;∈(0,1);z表示图像帧的编号。
29、优选地,图像分辨率处理为128*416。
30、本技术的另一个提供了一种基于自监督学习的目标识别方法,包括以下步骤:
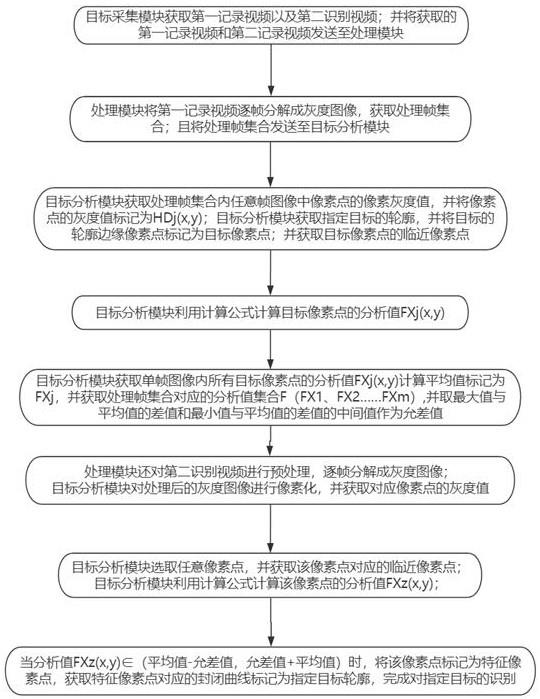
31、目标采集模块获取第一记录视频以及第二识别视频;并将获取的第一记录视频和第二记录视频发送至处理模块;
32、处理模块将第一记录视频逐帧分解成灰度图像,处理图像分辨率;并对每一帧图像进行判断识别,判定当前帧是否为首帧图像或尾帧图像,并将首帧图像、中间帧图像……中间帧图像、尾帧图像标记为处理帧集合;且将处理帧集合发送至目标分析模块;
33、目标分析模块获取处理帧集合内任意帧图像中像素点的像素灰度值,并将像素点的灰度值标记为hdj(x,y),其中的j表示处理帧集合内单帧图像的编号,j=1,2……m;(x,y)表示像素点的坐标值;目标分析模块获取指定目标的轮廓,并将目标的轮廓边缘像素点标记为目标像素点;目标分析模块并获取目标像素点的临近像素点;
34、目标分析模块利用计算公式计算目标像素点的分析值fxj(x,y);
35、目标分析模块获取单帧图像内所有目标像素点的分析值fxj(x,y)计算平均值标记为fxj,并获取处理帧集合对应的分析值集合f(fx1、fx2……fxm);
36、目标分析模块获取分析值集合f内fxj的数值大小,并分别获取最大值、最小值以及平均值;
37、并取最大值与平均值的差值和最小值与平均值的差值的中间值作为允差值;将平均值以及允差值发送至数据存储模块;
38、所述处理模块还对第二识别视频进行预处理,逐帧分解成灰度图像;
39、目标分析模块对处理后的灰度图像进行像素化,并获取对应像素点的灰度值;
40、目标分析模块选取任意像素点,并获取该像素点对应的临近像素点;
41、目标分析模块利用计算公式计算该像素点的分析值fxz(x,y);
42、当分析值fxz(x,y)∈(平均值-允差值,允差值+平均值)时,将该像素点标记为特征像素点,获取特征像素点对应的封闭曲线标记为指定目标轮廓,完成对指定目标的识别。
43、其中,临近像素点的选取方式包括:
44、以目标像素点为中心,获取与目标像素点直接接触的像素点并标记为临近像素点。
45、与现有技术相比,本发明的有益效果是:
46、本发明无需事先建立训练样本,将目标采集模块获取的确定含有的指定目标的第一记录视频中的数据作为分析样本,分析样本完全来源于待识别的数据样本中,通过对自身样本的预处理,对第一记录视频逐帧分解成灰度图像,获取处理帧集合,且对处理帧集合中的目标像素点进行分析值的计算,并结合处理帧集合中的所有图像帧进行平均值以及允差值的获取,获取分析值的判定范围;
47、而后对第二记录视频进行同样的预处理操作,将第二记录视频逐帧分解成灰度图像,目标分析模块对处理后的灰度图像进行像素化,并获取对应像素点的灰度值,任意选取像素点并获取临近像素点计算该像素点的分析值,且与平均值、允差值构成的区间进行比较判定是否为特征像素点,获取特征像素点对应的封闭曲线标记为指定目标轮廓,完成对指定目标的识别。
- 还没有人留言评论。精彩留言会获得点赞!