用于运粮设备的调度方法、系统、运粮设备及处理器与流程
本技术涉及智能农机设备,具体涉及一种用于运粮设备的调度方法、系统、运粮设备、存储介质及处理器。
背景技术:
1、农业机械化是现代农业的重要物质技术基础,是农业现代化的重要内容和标志。在大规模的农田收割作业中多辆收获机同时作业,其在收割一定时间之后需要进行卸粮操作。在现有技术中,运粮车通常只能在原地等待收获机粮仓装满后,等到收获机通知前往卸粮。在多辆收获机和多辆运粮车同时作业时,由于无法进行合理的协调和调度,导致收获机在粮仓装满时没有运粮车能够让收获机及时卸粮,并且部分运粮车的利用率很低。
技术实现思路
1、本技术实施例的目的是提供一种用于运粮设备的调度方法、系统、运粮设备、存储介质及处理器。
2、为了实现上述目的,本技术第一方面提供一种用于运粮设备的调度方法,包括:
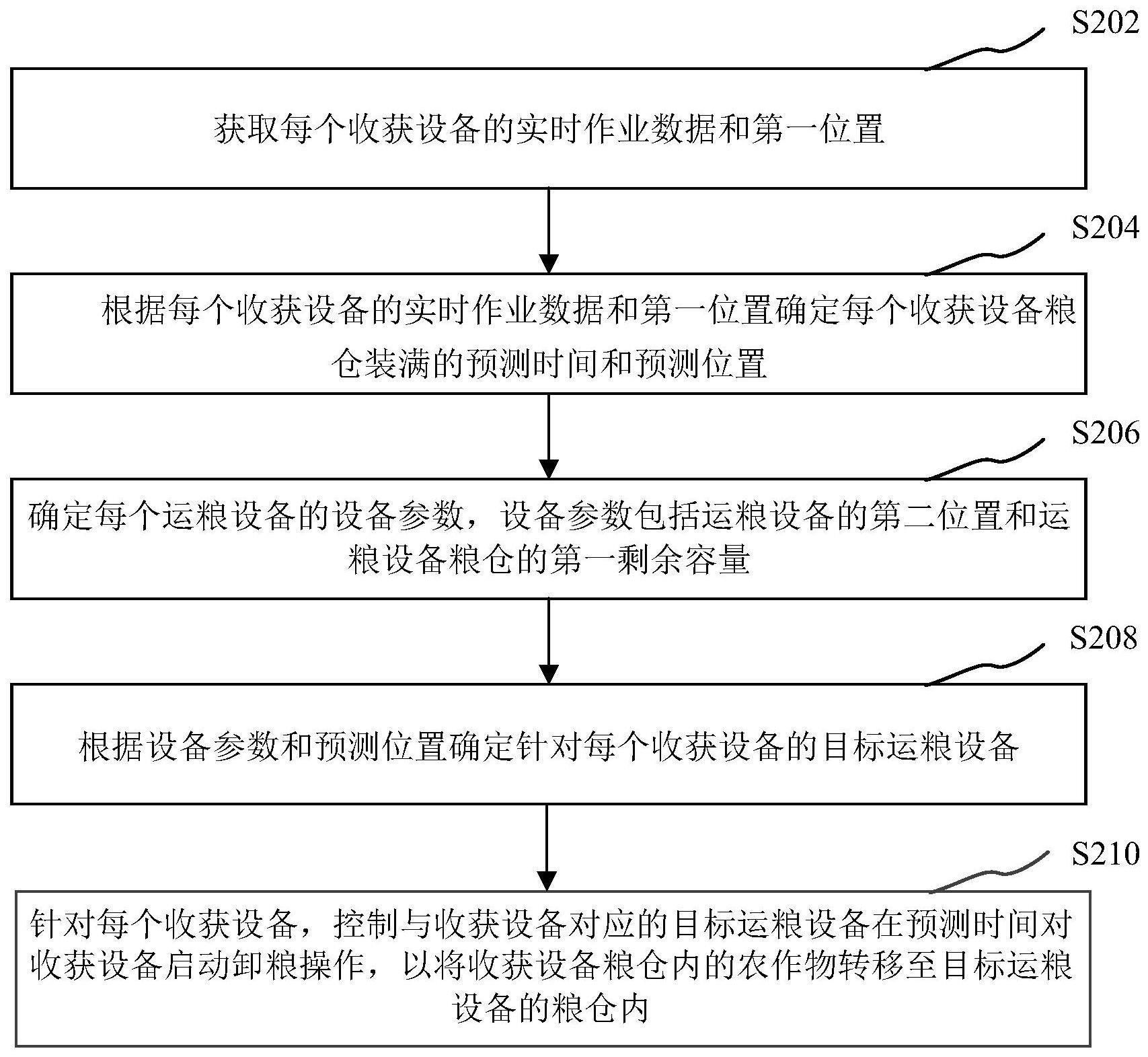
3、获取每个收获设备的实时作业数据和第一位置;
4、根据每个收获设备的实时作业数据和第一位置确定每个收获设备粮仓装满的预测时间和预测位置;
5、确定每个运粮设备的设备参数,设备参数包括运粮设备的第二位置和运粮设备粮仓的第一剩余容量;
6、根据设备参数和预测位置确定针对每个收获设备的目标运粮设备;
7、针对每个收获设备,控制与收获设备对应的目标运粮设备在预测时间对收获设备启动卸粮操作,以将收获设备粮仓内的农作物转移至目标运粮设备的粮仓内。
8、在本技术的实施例中,根据设备参数和预测位置确定针对每个收获设备的目标运粮设备包括:针对每个收获设备,根据每个运粮设备的第二位置和预测位置确定每个运粮设备与收获设备之间的预测间隔距离;针对每个收获设备,根据每个运粮设备的第一剩余容量、收获设备的粮仓总容量、以及每个运粮设备对应的预测间隔距离确定每个运粮设备针对收获设备的相关算子值;针对每个收获设备,将数值最大的相关算子值对应的运粮设备确定为收获设备的目标运粮设备。
9、在本技术的实施例中,针对每个收获设备,将数值最大的相关算子值对应的运粮设备确定为收获设备的目标运粮设备还包括:针对每个收获设备,将相关算子值按照从大到小的顺序排列;选出相关算子值排列在前,且满足第一剩余容量的总和大于或等于收获设备的粮仓总容量的最小数量的运粮设备确定为收获设备的目标运粮设备。
10、在本技术的实施例中,根据每个运粮设备的第一剩余容量、收获设备的粮仓总容量、以及每个运粮设备对应的预测间隔距离确定每个运粮设备针对收获设备的相关算子值包括:根据公式(1)确定相关算子:
11、
12、其中,si[j]是指第i辆收获设备与第j辆运粮设备的相关算子,vj是指第j辆运粮设备粮仓的第一剩余容量,vi是指第i辆收获设备的粮仓总容量,lo[i j]是指第i辆收获设备与第j辆运粮设备之间的预测间隔距离。
13、在本技术的实施例中,实时作业数据包括每个收获设备的实时车速、实时割幅以及粮仓的第一粮食体积,根据每个收获设备的实时作业数据和第一位置确定每个收获设备粮仓装满的预测时间和预测位置包括:获取每个收获设备的粮仓总容量;根据每个收获设备的第一粮食体积和粮仓总容量确定每个收获设备粮仓的第二剩余容量;根据每个收获设备的实时车速、实时割幅以及第二剩余容量确定每个收获设备的预测时间;根据每个收获设备的第一位置和预测时间确定每个收获设备的预测位置。
14、在本技术的实施例中,控制与收获设备对应的目标运粮设备在预测时间对收获设备启动卸粮操作包括:根据目标运粮设备的所在位置和预测位置确定目标运粮设备的运粮路径;控制目标运粮设备按照运粮路径到达预测位置,并在预测时间启动针对收获设备的卸粮操作。
15、在本技术的实施例中,收获设备包括卸粮容器,卸粮容器上安装有第一图像采集设备,调度方法还包括:在目标运粮设备处于预测位置的情况下,获取第一图像采集设备采集到的目标运粮设备的粮仓外部图像;根据粮仓外部图像确定目标运粮设备的粮仓位置;在确定粮仓位置与卸粮的目标位置之间的位置误差值处于预设数值范围内的情况下,控制目标运粮设备在预测时间对收获设备启动卸粮操作,以使收获设备内的农作物从卸粮容器内转移至目标运粮设备的粮仓;在确定粮仓位置与卸粮的目标位置之间的位置误差值超出预设数值范围内的情况下,调整目标运粮设备的粮仓位置,直到粮仓位置与卸粮的目标位置之间的位置误差值处于预设数值范围内。
16、在本技术的实施例中,运粮设备包括第二图像采集设备,确定每个运粮设备的设备参数包括:通过每个运粮设备的第二图像采集设备采集每个运粮设备粮仓的粮仓内部图像;根据每个运粮设备的粮仓内部图像确定每个运粮设备粮仓的第二粮食体积;根据第二粮食体积和运粮设备的粮仓总容量确定每个运粮设备粮仓的第一剩余容量。
17、本技术第二方面提供一种处理器,被配置成执行上述的用于运粮设备的调度方法。
18、本技术第三方面提供一种用于运粮设备的调度系统,调度系统包括:
19、至少一个收获设备,用于收获农作物,其中,收获设备包括:数据采集设备,用于采集收获设备的实时作业数据;第一定位装置,用于确定收获设备的第一位置;
20、至少一个运粮设备,用于对收获设备启动卸粮操作,其中,运粮设备包括:第二定位装置,用于确定运粮设备的第二位置;以及
21、被配置成执行上述的用于运粮设备的调度方法的处理器。
22、在本技术的实施例中,收获设备还包括第一图像采集设备,用于采集目标运粮设备的粮仓外部图像;运粮设备还包括第二图像采集设备,用于采集每个运粮设备粮仓的粮仓内部图像。
23、本技术第四方面提供一种运粮设备,包括:
24、第二定位装置,用于确定运粮设备的第二位置;以及
25、被配置成执行上述的用于运粮设备的调度方法的处理器。
26、本技术第五方面提供一种用于运粮设备的调度系统,调度系统包括:
27、至少一个收获设备,用于收获农作物,其中,收获设备包括:
28、数据采集设备,用于采集收获设备的实时作业数据;
29、第一定位装置,用于确定收获设备的第一位置;
30、至少一个包含有被配置成执行上述的用于运粮设备的调度方法的处理器的运粮设备。
31、在本技术的实施例中,收获设备还包括第一图像采集设备,用于采集目标运粮设备的粮仓外部图像;运粮设备还包括第二图像采集设备,用于采集每个运粮设备粮仓的粮仓内部图像。
32、本技术第六方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被处理器执行时使得所述处理器被配置成执行上述的用于运粮设备的调度方法。
33、通过上述技术方案,通过每个收获设备的实时作业数据和第一位置,可以确定出每个收获设备粮仓装满的预测时间和预测位置。根据运粮设备粮仓的第一剩余容量和第二位置以及每个收获设备的预测位置,可以从运粮设备中挑选出针对每个收获设备的目标运粮设备,并控制目标运粮设备前往对应的收获设备启动卸粮,以将收获设备粮仓内的农作物转移至目标运粮设备的粮仓内。针对每个收获设备可以确定出运粮设备的最佳调度方案,使得每个收获设备能够及时卸粮。通过机群协同工作,可以实现收割作业的连续化,提高农作物收割的效率以及运粮设备的利用率。
34、本技术实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!