基于半监督式数据增强的电池缺陷检测方法
本发明涉及电池工业缺陷检测领域,具体涉及一种基于半监督式数据增强的电池缺陷检测方法。
背景技术:
1、碱性电池作为重要的能源供应装置,应用于包括便携式电子设备、医疗设备、导航仪器等众多领域。而电池负极盖是电池内部结构中的一个重要组成部分,是保证电池正常运行和安全性的关键因素之一。然而由于生产和检测过程中的复杂性和变异性,电池负极盖很容易出现一些缺陷,如划痕、负极盖脱镍、集电体异变、油污等,这些缺陷会影响电池的性能和使用寿命,因此,快速准确地检测电池负极盖的缺陷成为了电池行业的重要问题。目前电池负极盖缺陷检测方法主要依靠人工检查和传统图像处理技术。人工检查耗费大量的人力和时间,且效率低下,难以满足大规模生产和高速生产线的需求且存在主观性,而传统图像处理技术只能检测已知的缺陷类型,无法应对新出现的缺陷类型,导致检测能力受到限制。与此同时,随着深度学习技术的发展,基于深度学习的电池负极盖缺陷检测方法得到了广泛的关注和应用。
2、基于深度学习的缺陷检测方法可以挖掘数据的深层结构,自动学习具有代表性的特征,并且可以应对更加复杂的场景,具有更强的识别能力和适应性,具有更强的泛化能力,能够应对未知的缺陷类型和不同的生产环境,实现高效自动化检测,大大提高了生产效率。但是,深度学习模型往往需要海量的数据进行训练,以达到稳定准确的分类性能,由于电池制造企业对于产品质量的保密性要求,很难获得足够数量和多样性的电池负极盖缺陷数据,这限制了基于深度学习的电池负极盖缺陷检测方法的应用。数据增强技术是近年来在深度学习领域中被广泛应用的一种方法但旋转、缩放、裁剪和噪声注入等传统增强方式可能会破坏图像的结构和特征,增加噪声和冗余数据,导致图像的质量下降影响模型的训练效果。
技术实现思路
1、为了解决现存的碱性电池负极盖缺陷数据不足导致深度学习模型效果较差的问题,在已有技术的基础上本发明提出了一种基于半监督式数据增强的电池缺点检测方法。该方法首先通过对工业现场采集的初始样本数据进行极坐标转换,并通过滑动窗口进行二次数据采集实现第一次样本扩增,利用该批碱性电池数据进行模型训练,生成一个粗分类模型获取特征反应图指导图像的随机剪裁进行数据扩增,避免了因传统随机剪裁引起的缺陷特征缺失,在扩充数据集的基础上更完整地保留了缺陷特征,使得模型能够更准确地提取目标特征,更快地达到收敛,检测结果更加准确。
2、基于半监督式数据增强的电池缺陷检测方法,包括以下步骤:
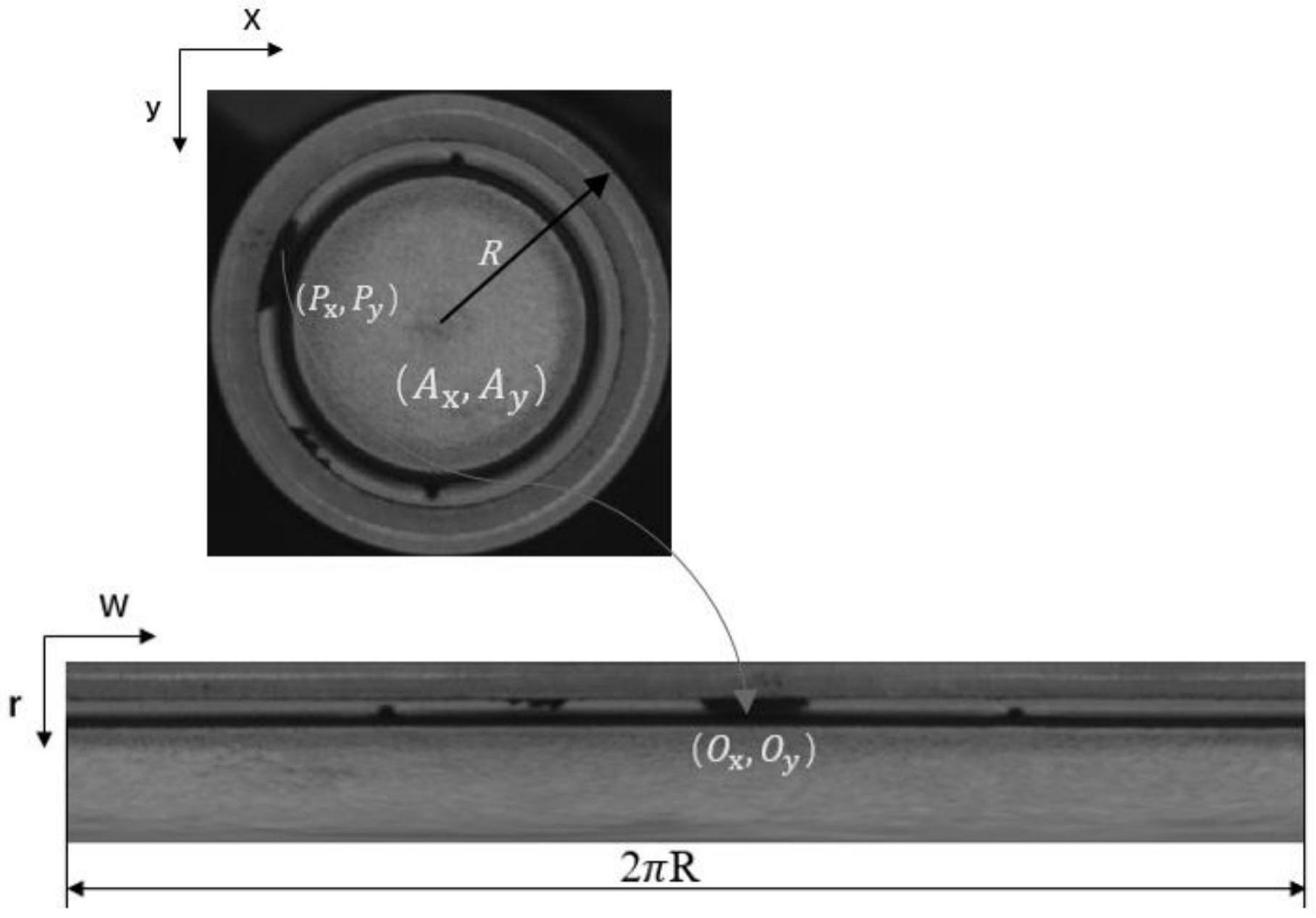
3、步骤1,对初始的工业现场碱性电池负极盖缺陷数据进行极坐标转换,将电池圆环图像转化为矩形图像,便于后续算法的实现;
4、步骤2,利用滑动窗口进行二次数据采集,将原始数据裁剪成适合cnn模型训练和预测的小图像,然后筛选分类并标记裁剪后的图像;
5、步骤3,利用二次采集的数据训练resnet34网络获取粗分类器,利用粗分类器获取卷积层中的样本特征强度图;通过强度图随机选取位置确定剪裁中心,获取剪裁图像进行半监督式二次样本扩增;
6、步骤4,利用扩增后的数据对之前训练过的resnet34模型进行二次训练,获取更为精准的检测模型;
7、进一步,所述步骤1中的极坐标转换是将图像从直角坐标系下的表示,转换成极坐标系下的表示。极坐标由两个量组成:极径和极角,其中极径表示像素到原点的距离,极角表示像素到原点的连线与x轴的夹角,具体转换步骤包括:
8、1.1)通过以下公式计算每个像素在极坐标系下的极径和极角:
9、
10、
11、其中,x和y分别是像素在直角坐标系下的横坐标和纵坐标,x0和y0是原点在直角坐标系下的横坐标和纵坐标。
12、1.2)对于计算出的每个像素在极坐标系下的极径和极角,可以使用以下公式将其转换为矩形坐标系下的像素位置:
13、x=r cosθ
14、y=r sinθ
15、其中,r和θ分别是像素在极坐标系下的极径和极角,x和y分别是像素在矩形坐标系下的横坐标和纵坐标。
16、1.3)确定矩形图像的尺寸,通过遍历所有极坐标变换后的像素位置,找到最大的横坐标xmax、最小的横坐标xmin、最大的纵坐标max和最小的纵坐标min,这样就可以确定矩形图像的尺寸。
17、1.4)使用双线性插值方法计算像素值:通过周围四个像素的灰度值来估算目标像素的灰度值,具体实现通过下面的公式:
18、i(x,y)=(1-dx)(1-dy)ii,j+dx(1-dy)ii+1,j+(1dx)dyii,j+1+dxdyii+1,j+1
19、其中,i(x,y)是目标像素的灰度值,{i,j}、{i+1,j}、{i,j+1}、{i+1,j+1}分别是周围四个像素的灰度值,dx和dy分别是目标像素在x和y方向上的偏移量。
20、进一步,步骤2中所述滑动窗口采集适合cnn和预测的小图像具体分辨率为(256*256);
21、进一步,步骤3中所述的半监督式二次数据扩增具体步骤包括:
22、3.1)粗分类器的训练:使用经过滑动窗口采集并分类标记的数据集训练resnet34网络,得到一个粗分类器;
23、3.2)遮挡实验:对于所有训练集和验证集的样本,进行遮挡实验,获取所有样本在网络最上层卷积层的特征响应强度图;
24、具体来说,对于每个样本,通过将其不同位置遮挡,得到多个被遮挡的子图像,并在网络中进行前向推断。由于某些部分被遮挡,网络在这些子图像上的输出将与原始图像上的输出不同。因此,可以通过比较这些子图像的输出来计算每个位置对于样本分类的贡献。将这些贡献映射回到最上层卷积层的特征图上,就得到了每个样本在该特征图上的特征响应强度图。
25、3.3)数据增强:设定强度阈值,随机选取强度i<0.4的位置,并将其映射回原始图像,并将其作为一个裁剪中心;对每个样本进行三次裁剪,裁剪尺寸为244×244,并进行数据增强,如随机翻转、旋转等;
26、3.4)相似度计算:对于每个增强样本,使用欧式距离计算其与原始样本之间的相似度,并设定样本间欧式距离的阈值i2=0.6,如果两个样本之间欧式距离大于i2,则认为它们之间的差异较大并保存该增强样本,依次类推形成一个训练集的增强子集;这个子集包含了与目标样本差异较大的一定比例或数量的样本,从而提高了训练集的多样性和泛化能力;
27、其中欧式距离的计算公式为:
28、
29、其中n表示特征向量的维度,即样本的特征数。xi和yi分别表示两个样本的特征向量,欧氏距离越小,说明两个样本之间越相似。
30、3.5)微调粗分类器:使用最终的训练集对resnet3粗分类器在初始训练权重的基础上继续训练,得到一个更加准确的分类器进行缺陷检测;
31、本发明的有益效果:本发明提出了一种基于半监督式数据增强的电池缺点检测方法,与现有技术方法相比,本发明的技术方案取得了如下的显著进步:
32、1)本发明提出了利用深度学习进行碱性电池负极盖缺陷检测,解决了人工的目视检测带来的高成本,高误判的问题,解决了传统机器视觉检测受光线、摄像头角度、颜色等多方面限制的问题,利用深度学习进行碱性电池负极盖缺陷检测提高生产效率,降低制造成本。减少了误判风险,提高了检测准确率和稳定性。
33、2)本发明通过极坐标转换、滑动窗口采集方法进行初始电池缺陷样本数据采集可以获取更多数据样本,有效减少了模型过拟合的问题,提高了初始模型的准确性。
34、3)本发明采用半监督数据增强方法进行电池数据扩增,可以有效地利用已有的数据集,减少新数据集的采集和标注成本,解决了传统的数据采集和标注方法需要大量的人力、物力和时间成本的问题。
35、4)本发明采用半监督数据增强方法进行数据扩增,解决了在碱性电池工业现场样本获取难度大,数量有限、正负样本不均衡的问题,充分利用有限的样本数据生成更多的训练样本,避免数据不足的问题,提高模型的鲁棒性和准确率。
- 还没有人留言评论。精彩留言会获得点赞!