库位规划方法、装置、电子设备及存储介质与流程
本技术涉及自动化,尤其涉及一种库位规划方法、装置、电子设备及存储介质。
背景技术:
1、在仓储物流中,需要对货物进行装车,在将货物放置在货车上后可对货物进行转运。对货物进行装车,首先要确定货物在货车车厢中的摆放位置,目前的方式往往是识别货车车厢中的空位置,并将货物放置在货车车厢的空位置上,但是这种方法往往导致多个货物之间的间隙过大,造成货车车厢空间的浪费。
技术实现思路
1、本技术实施例公开了一种库位规划方法、装置、电子设备及存储介质,能够缩小货车车厢中放置的货物之间的间隙,提高货车车厢的空间利用率。
2、本技术实施例公开了一种库位规划方法,所述方法包括:
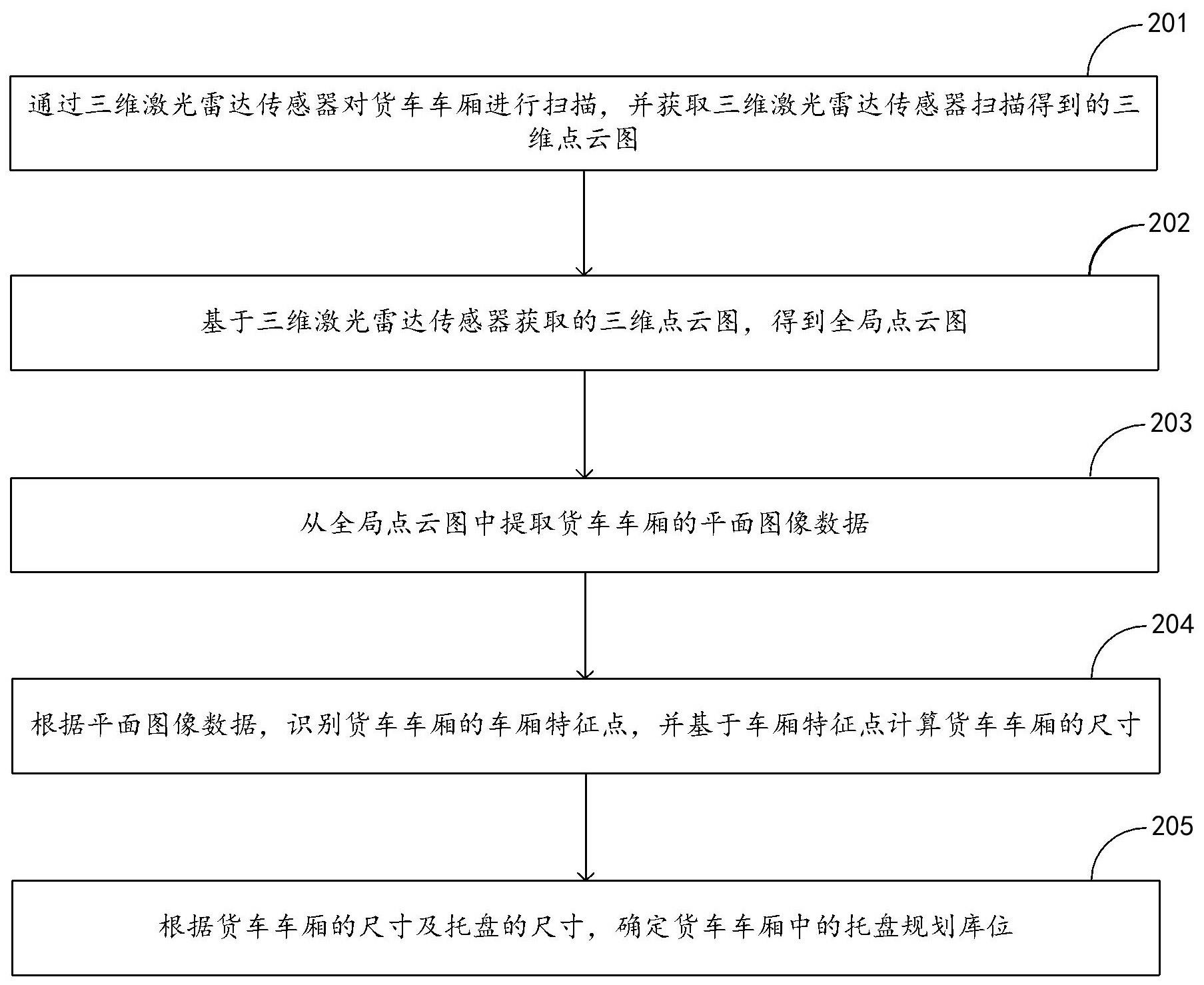
3、通过三维激光雷达传感器对货车车厢进行扫描,并获取所述三维激光雷达传感器扫描得到的三维点云图;
4、基于所述三维激光雷达传感器获取的三维点云图,得到全局点云图;
5、从所述全局点云图中提取所述货车车厢的平面图像数据;
6、根据所述平面图像数据,识别所述货车车厢的车厢特征点,并基于所述车厢特征点计算所述货车车厢的尺寸;
7、根据所述货车车厢的尺寸及托盘的尺寸,确定所述货车车厢中的托盘规划库位。
8、在一个实施例中,所述基于所述三维激光雷达传感器获取的三维点云图,得到全局点云图,包括:
9、对多个所述三维激光雷达传感器分别获取的三维点云图进行点云配准,得到多个点云配准集合,每个所述点云配准集合包括多个对应于同一位置的空间点三维坐标;
10、根据所述多个点云配准集合,确定变换矩阵,所述变换矩阵用于表征所述点云配准集合中各个对应于同一位置的空间点三维坐标之间的变换关系;
11、基于所述变换矩阵,对各个所述三维点云图进行点云拼接,得到全局点云图。
12、在一个实施例中,所述根据所述货车车厢的尺寸及托盘的尺寸,确定所述货车车厢中的托盘规划库位,包括:
13、确定货物放置于目标托盘的放置情况;所述目标托盘为任一托盘;
14、若所述放置情况指示所述货物超出所述目标托盘的承载面,则获取所述货物超出所述目标托盘的承载面的超出尺寸,并根据所述货车车厢的尺寸、所述目标托盘的尺寸以及所述超出尺寸,确定所述货车车厢中与所述目标托盘对应的托盘规划库位;
15、若所述放置情况指示所述货物未超出所述目标托盘的承载面,则根据所述货车车厢的尺寸和所述目标托盘的尺寸,确定所述货车车厢中与所述目标托盘对应的托盘规划库位。
16、在一个实施例中,所述确定货物放置于目标托盘的放置情况,包括:
17、获取输入的所述目标托盘的尺寸以及放置于所述目标托盘的货物的尺寸;
18、若所述放置于所述目标托盘的货物的尺寸大于所述目标托盘的尺寸,则确定所述货物放置于所述目标托盘的放置情况为所述货物超出所述目标托盘的承载面;
19、若所述放置于所述目标托盘的货物的尺寸小于所述目标托盘的尺寸,则确定所述货物放置于所述目标托盘的放置情况为所述货物未超出所述目标托盘的承载面;和/或,
20、获取货物图像,所述货物图像包括所述目标托盘以及放置于所述目标托盘中的货物;
21、若根据所述货物图像识别出所述货物遮挡所述目标托盘的承载面的边缘,则确定所述货物放置于所述目标托盘的放置情况为所述货物超出所述目标托盘的承载面;
22、若根据所述货物图像识别出所述货物未遮挡所述目标托盘的承载面的边缘,则确定所述货物放置于所述目标托盘的放置情况为所述货物未超出所述目标托盘的承载面。
23、在一个实施例中,在根据所述货车车厢的尺寸及托盘的尺寸,确定所述货车车厢中的托盘规划库位之后,所述方法还包括:
24、根据货车的第一位姿信息以及所述货车车厢中的托盘规划库位,生成装车指令;
25、向无人叉车发送所述装车指令,以使所述无人叉车根据所述装车指令确定目标托盘规划库位的第二位姿信息,根据所述第二位姿信息以及所述无人叉车的第三位姿信息生成导航路线,叉取货物并按照所述导航路线到达所述目标托盘规划库位对应的指定位置,根据所述第二位姿信息调整所述无人叉车的姿态,并将所述无人叉车叉取的货物放置于所述目标托盘规划库位中。
26、在一个实施例中,在所述向无人叉车发送所述装车指令之前,所述方法还包括:
27、接收检测传感器发送的检测信号,所述检测传感器设置于输送线的出口区域,所述输送线用于传输货物;所述检测传感器用于在检测到所述货物到达所述出口区域的情况下,发送检测信号;
28、根据所述检测传感器发送的检测信号,向无人叉车发送取货指令,以使所述无人叉车根据所述取货指令前往所述输送线的出口区域叉取所述货物。
29、在一个实施例中,所述根据所述检测传感器发送的检测信号,向无人叉车发送取货指令,包括:
30、对比在预设时长内连续接收到的所述检测传感器发送的多个检测信号;
31、确定所述多个检测信号之间的差异;
32、若所述差异小于差异阈值,则确定所述货物处于停稳状态,并向所述无人叉车发送取货指令。
33、本技术实施例公开了一种库位规划装置,所述库位规划装置包括:
34、扫描模块,用于通过三维激光雷达传感器对货车车厢进行扫描,并获取所述三维激光雷达传感器扫描得到的三维点云图;
35、获取模块,用于基于所述三维激光雷达传感器获取的三维点云图,得到全局点云图;
36、提取模块,用于从所述全局点云图中提取所述货车车厢的平面图像数据;
37、计算模块,用于根据所述平面图像数据,识别所述货车车厢的车厢特征点,并基于所述车厢特征点计算所述货车车厢的尺寸;
38、确定模块,用于根据所述货车车厢的尺寸及托盘的尺寸,确定所述货车车厢中的托盘规划库位。
39、本技术实施例公开了一种电子设备,包括:
40、存储有可执行程序代码的存储器;
41、与所述存储器耦合的处理器;
42、所述处理器调用所述存储器中存储的所述可执行程序代码,执行上述任一实施例所述的方法。
43、本技术实施例公开了一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,其中,所述计算机程序在被处理器执行时,使得所述处理器执行上述任一实施例所述的方法。
44、通过本技术实施例公开的库位规划方法、装置、电子设备及存储介质,通过三维激光雷达传感器对货车车厢进行扫描,并获取三维激光雷达传感器扫描得到的三维点云图;根据三维激光雷达传感器获取的三维点云图,得到全局点云图;从全局点云图中提取货车车厢的平面图像数据;从平面图像数据中识别货车车厢的车厢特征点,基于车厢特征点计算货车车厢的尺寸;根据货车车厢的尺寸及托盘的尺寸,确定货车车厢中的托盘规划库位。本技术实施例采用三维激光感知技术以及点云处理技术准确确定货车车厢的尺寸,并根据货车车厢的尺寸及托盘的尺寸对货车车厢的空间进行精准的库位规划,利用规划的托盘规划库位放置货物可缩小货车车厢中放置的货物之间的间隙,提高货车车厢的空间利用率。
- 还没有人留言评论。精彩留言会获得点赞!