一种复杂中心拉杆转子系统的动力学建模方法与流程
本发明涉及驱动装置,具体而言,涉及一种复杂中心拉杆转子系统的动力学建模方法。
背景技术:
1、建立合理且高效的转子动力学模型是开展转子动力学设计和研究转子振动特性的关键。目前,国内外学者在航空高速转子系统建模方面进行了大量的研究,采用的建模方法包括集总参数法、传递矩阵法、有限元法和模态综合法等。这些方法大多将转子结构简化成等截面梁和刚性盘的组合,很少考虑转子的局部细节特征。这样做虽然可以简化求解过程,但是难以获得转子系统真实的动力学特性。使用商用有限元软件建模虽然能够很好地表征转子系统复杂的变截面特性,但是模型总体自由度过大,在计算系统的瞬态特性和非线性动力学特性时存在计算效率低下的问题。
2、应用于某型航空机电系统的中心拉杆转子,其具有中心拉杆预紧、端面圆弧齿传扭的部件结构形式,轴向变截面特征复杂,结构连接面多,中心拉杆预紧力、端齿连接接触刚度等因素的存在使得中心拉杆转子系统的动力学特性更加复杂。为了使仿真得到的结论规律可以更好地指导实际设计,需要针对性地建立一种计算量小、效率高且能真实反映转子复杂结构特征的通用动力学模型。
技术实现思路
1、为解决如何提高转子动力学模型精度、并降低计算成本的问题,本发明提供了一种复杂中心拉杆转子系统的动力学建模方法。
2、第一方面,本发明提供了一种复杂中心拉杆转子系统的动力学建模方法,包括:
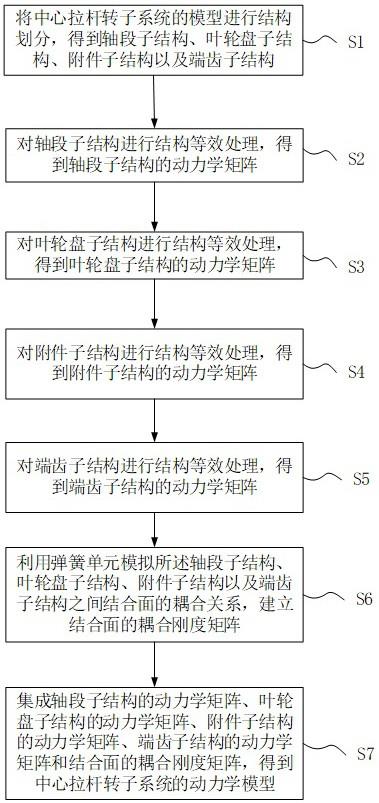
3、s1,将中心拉杆转子系统的模型进行结构划分,得到轴段子结构、叶轮盘子结构、附件子结构以及端齿子结构;
4、s2,对轴段子结构进行结构等效处理,得到轴段子结构的动力学矩阵;
5、s3,对叶轮盘子结构进行结构等效处理,得到叶轮盘子结构的动力学矩阵;
6、s4,对附件子结构进行结构等效处理,得到附件子结构的动力学矩阵;
7、s5,对端齿子结构进行结构等效处理,得到端齿子结构的动力学矩阵;
8、s6,利用弹簧单元模拟轴段子结构、叶轮盘子结构、附件子结构以及端齿子结构之间结合面的耦合关系,建立结合面的耦合刚度矩阵;
9、s7,集成轴段子结构的动力学矩阵、叶轮盘子结构的动力学矩阵、附件子结构的动力学矩阵、端齿子结构的动力学矩阵和结合面的耦合刚度矩阵,得到中心拉杆转子系统的动力学模型。
10、在一些实施例中,所述s2,对轴段子结构进行结构等效处理,得到轴段子结构的动力学矩阵,包括:
11、s21,基于截面的内外径变化对轴段子结构进行有限元划分,得到轴段等截面梁单元、轴段锥形变截面梁单元和轴段不规则变截面梁单元;
12、s22,计算轴段不规则变截面梁单元的质量和极转动惯量,使轴段等截面梁单元的轴向长度、材料密度、质量和极转动惯量与轴段不规则变截面梁单元的参数相同,将轴段不规则变截面梁单元等效为轴段等截面梁单元;
13、s23,利用timoshenko梁假设和拉格朗日方程对轴段等截面梁单元、锥形变截面梁单元进行处理,得到轴段子结构的动力学矩阵。
14、在一些实施例中,所述s3,对叶轮盘子结构进行结构等效处理,得到叶轮盘子结构的动力学矩阵,包括:
15、s31,将叶轮盘子结构分为叶片部分和轮盘部分;
16、s32,计算叶片部分的质量和转动惯量,得到叶片部分的附加质量矩阵;
17、s33,对轮盘部分进行有限元划分,得到轮盘等截面梁单元、轮盘锥形变截面梁单元和轮盘不规则变截面梁单元;
18、s34,利用timoshenko梁假设和拉格朗日方程对s33中的轮盘等截面梁单元、轮盘锥形变截面梁单元和等轮盘不规则变截面梁单元进行处理,得到轮盘部分的完整自由度的动力学矩阵;
19、s35,采用guyan静力缩减对轮盘部分的单元自由度进行缩减,得到只保留主自由度的轮盘动力学矩阵;
20、s36,将叶片部分的附加质量矩阵集成到单元自由度缩减后的轮盘动力学矩阵上,得到叶轮盘子结构的动力学矩阵。
21、在一些实施例中,所述s4,对附件子结构进行结构等效处理,得到附件子结构的动力学矩阵,包括:
22、s41,对附件子结构进行有限元划分,得到附件等截面梁单元、附件锥形变截面梁单元和附件不规则变截面梁单元;
23、s42,利用timoshenko梁假设和拉格朗日方程对s41中的附件等截面梁单元、附件锥形变截面梁单元和附件不规则变截面梁单元进行处理,得到附件子结构的动力学矩阵;
24、s43,附件子结构的划分节点与对应的轴段子结构一致,将s42的附件子结构的动力学矩阵叠加到对应的轴段子结构的动力学矩阵上。
25、在一些实施例中,所述s5,对端齿子结构进行结构等效处理,得到端齿子结构的动力学矩阵,包括:
26、s51,基于gw接触模型和摩擦理论得到单对端齿接触面上受到的法向力和切向力;
27、s52,由接触面上的法向力和切向力推导出接触面处的法向刚度和切向刚度,并转换为单对端齿在水平轴向上的等效连接刚度;
28、s53,对所有对端齿水平轴向的等效连接刚度求和,得到整体端齿水平轴向的等效连接刚度;
29、s54,对端齿水平轴向的等效连接刚度和端齿本体刚度进行串联,得到端齿整体连接刚度;
30、s55,由端齿整体连接刚度,得到端齿子结构的等效弹性模量;
31、s56,使用端齿子结构的等效弹性模量,利用timoshenko梁假设和拉格朗日方程得到端齿子结构的动力学矩阵。
32、在一些实施例中,所述s6,利用弹簧单元模拟轴段子结构、叶轮盘子结构、附件子结构以及端齿子结构之间结合面的耦合关系,建立结合面的耦合刚度矩阵,包括:
33、s61,将结合面划分为螺纹结合面和凸台结合面;
34、s62,建立螺纹结合面的连接耦合弹簧,在结合面上布置分布式弹簧,每组弹簧包含一个平动弹簧和一个转动弹簧;
35、s63,建立凸台结合面的连接耦合弹簧,在结合面上布置分布式弹簧,每组弹簧包含一个平动弹簧;
36、s64,给定弹簧刚度,得到结合面上各对耦合节点之间的广义耦合力,并转换为耦合刚度矩阵,将结合面内所有对节点之间的耦合刚度矩阵进行集成,得到结合面的耦合刚度矩阵。
37、在一些实施例中,所述s7,集成轴段子结构的动力学矩阵、叶轮盘子结构的动力学矩阵、附件子结构的动力学矩阵、端齿子结构的动力学矩阵和结合面的耦合刚度矩阵,得到中心拉杆转子系统的动力学模型,包括:
38、s71,将轴承支承18简化为具有支承刚度和阻尼的弹性结构,并得到其刚度矩阵和阻尼矩阵;
39、s72,采用瑞利阻尼建立中心拉杆转子系统的结构阻尼矩阵;
40、s72,集成各子结构动力学矩阵、结合面的耦合刚度矩阵、轴承刚度矩阵、轴承阻尼矩阵和系统结构阻尼矩阵,得到中心拉杆转子系统的动力学模型。结合面的耦合刚度矩阵为解决如何提高转子动力学模型精度、并降低计算成本的问题,本发明有以下优点:
41、本发明提供了一种针对具有复杂变截面和界面接触特征的中心拉杆转子建模方法,采用ug软件辅助转子复杂结构的等效处理和离散建模,引入guyan静力缩减和gw界面接触模型对转子系统中复杂叶轮盘结构及端齿子结构进行等效建模,基于分布式弹簧单元组合表征子系统结合面上的动力学耦合关系。该建模方法还原度好,精度高,兼具较高的计算效率,可以快速对转子系统的动力学特性进行计算,支撑转子动力学设计和振动特性分析。该方法可以同样推广到具有类似结构特征的转子系统或主轴系统建模上去。
- 还没有人留言评论。精彩留言会获得点赞!