一种多尺度特征融合耕地变化检测方法及系统
本发明涉及遥感,尤其涉及一种多尺度特征融合耕地变化检测方法及系统。
背景技术:
1、双时相遥感影像变化检测技术旨在提取出双时相遥感影像内人们感兴趣的变化区域,它已经被广泛地应用在土地利用、城市化进程、自然灾害调查等各个领域,并取得了显著成效。受气候变化与人类活动的影响,耕地被占用的现象愈趋严重,这对当地农业生态系统与全球粮食安全产生了不利影响。因此,如何快速、准确地提取出双时相遥感影像中耕地范围内的变化区域便成为了遥感领域的一大热点与难题。
2、现有的变化检测方法大体上可以被分为两类:传统变化检测方法和深度学习变化检测方法。传统变化检测方法主要通过判断单个像素之间的光谱差异来获取变化区域或利用影像的空间上下文信息进行对象级变化检测,但这类方法要么只关注到单个像素内的信息,检测结果会出现一定程度的椒盐噪声以及碎片化现象要么对对象分割精度的依赖性较强,并不足以应对多时相高分影像中复杂的地面情况。基于深度学习的变化检测方法可以同时对双时相影像进行特征提取并自动判别变化区域,实现端到端的遥感影像变化检测,输出变化图。得益于深度学习强大的信息挖掘和特征表征能力,基于深度学习的变化检测方法具有速度快、精度高以及高鲁棒性等特点。然而,随着遥感卫星性能的不断提高,遥感影像在幅宽不断增大的同时影像内的地物也更趋于精细化,现有方法在进行耕地范围内小变化目标的检测时,经常会出现检测结果不清晰、漏检及误检的情况。
3、因此,针对上述检测方法带来的不足,需要提出具有高精度和高可靠性的耕地变化检测方法。
技术实现思路
1、本发明提供一种多尺度特征融合耕地变化检测方法及系统,用以解决现有技术中针对耕地变化检测的方法普遍存在对微小变化检测不够精细,容易出现检测结果不清晰,以及漏检和误检的缺陷。
2、第一方面,本发明提供一种多尺度特征融合耕地变化检测方法,包括:
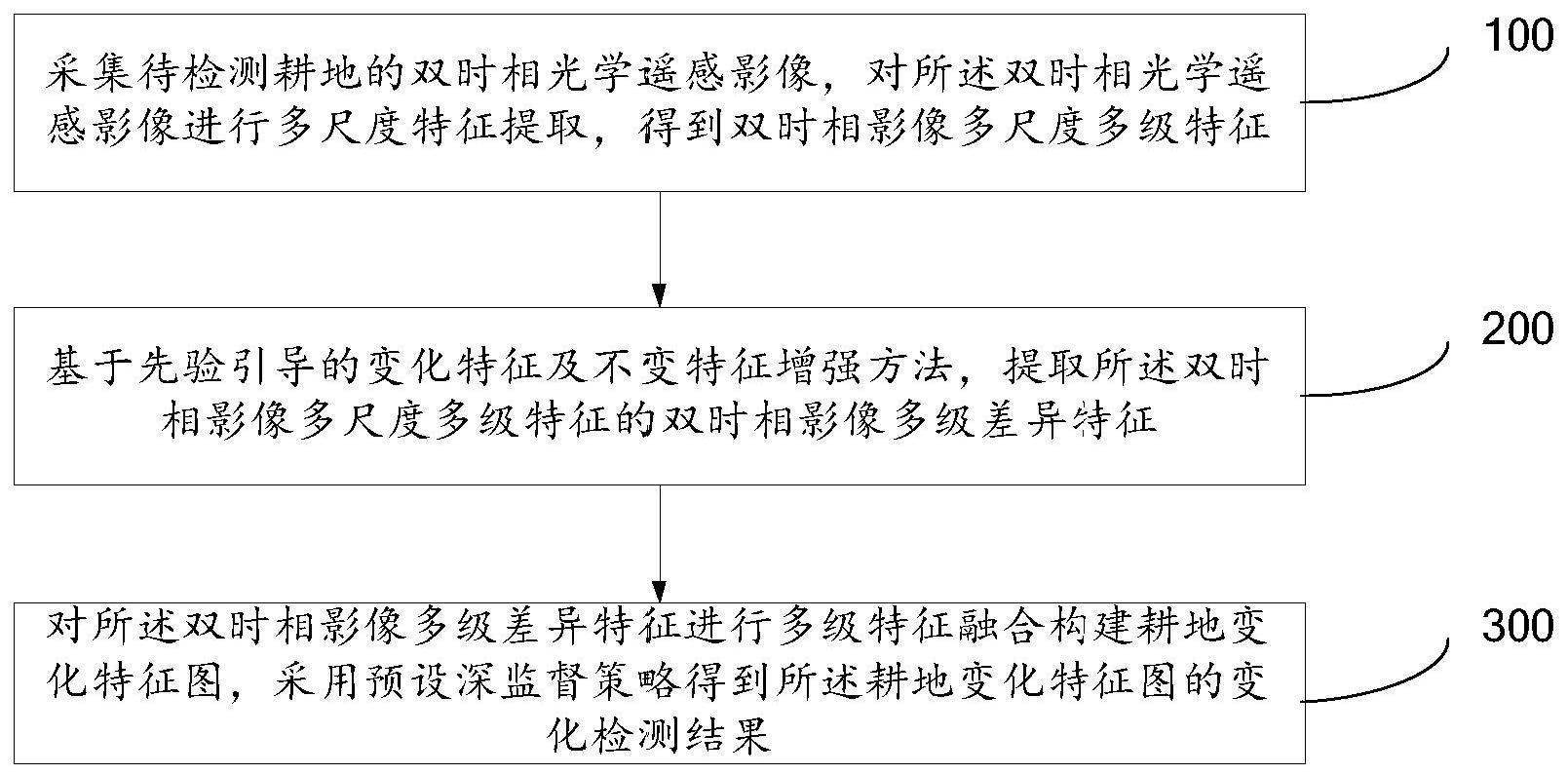
3、采集待检测耕地的双时相光学遥感影像,对所述双时相光学遥感影像进行多尺度特征提取,得到双时相影像多尺度多级特征;
4、基于先验引导的变化特征及不变特征增强方法,提取所述双时相影像多尺度多级特征的双时相影像多级差异特征;
5、对所述双时相影像多级差异特征进行多级特征融合构建耕地变化特征图,采用预设深监督策略得到所述耕地变化特征图的变化检测结果。
6、根据本发明提供的一种多尺度特征融合耕地变化检测方法,采集待检测耕地的双时相光学遥感影像,对所述双时相光学遥感影像进行多尺度特征提取,得到双时相影像多尺度多级特征,包括:
7、对所述双时相光学遥感影像进行位置编码,得到双时相光学遥感影像各部分的相对位置信息;
8、基于所述双时相光学遥感影像的编码方式及大小信息,确定所述双时相光学遥感影像对应的不同尺寸以及不同数量层级化窗口;
9、将所述双时相光学遥感影像的编码方式及大小信息输入至孪生网络,利用所述不同尺寸以及不同数量层级化窗口进行多头注意力计算,得到双时相影像多尺度特征;
10、利用多层感知机对所述双时相影像多尺度特征进行融合,得到所述双时相影像多尺度多级特征。
11、根据本发明提供的一种多尺度特征融合耕地变化检测方法,对所述双时相光学遥感影像进行位置编码,得到双时相光学遥感影像各部分的相对位置信息,包括:
12、将所述双时相光学遥感影像裁剪为若干不重叠补丁块,将所述若干不重叠补丁块作为令牌;
13、获取令牌维度,确定令牌所属位置以及所述令牌维度内的若干奇数位置元素和若干偶数位置元素;
14、分别基于所述令牌所属位置与所述若干偶数位置元素的正弦函数,以及所述令牌所属位置与所述若干奇数位置元素的余弦函数,得到所述若干不重叠补丁块的相对位置信息。
15、根据本发明提供的一种多尺度特征融合耕地变化检测方法,基于所述双时相光学遥感影像的编码方式及大小信息,确定所述双时相光学遥感影像对应的不同尺寸以及不同数量层级化窗口,包括:
16、利用所述双时相光学遥感影像的原始大小信息和网络结构,获取所述双时相光学遥感影像的层级和输入大小;
17、确定采用预设大窗口提取所述双时相光学遥感影像的全局结构化特征,采用预设小窗口提取所述双时相光学遥感影像的局部精细化特征,由所述双时相光学遥感影像的特征图大小确定层级化窗口数量;
18、确定预设浅层特征的层级化窗口类型数量大于预设深层特征的层级化窗口类型数量。
19、根据本发明提供的一种多尺度特征融合耕地变化检测方法,将所述双时相光学遥感影像的编码方式及大小信息输入至孪生网络,利用所述不同尺寸以及不同数量层级化窗口进行多头注意力计算,得到双时相影像多尺度特征,包括:
20、分别对所述双时相光学遥感影像进行保维度线性变换,得到矩阵q、矩阵k和矩阵v;
21、将矩阵q与转置矩阵k相乘除以矩阵q中元素维度的平方根,然后采用softmax函数进行归一化,得到注意力矩阵attn;
22、将矩阵v与注意力矩阵attn相乘,得到相关性计算矩阵,将多个自注意力对应的相关性计算矩阵进行拼接,并通过转换矩阵对拼接后的矩阵进行转换,得到输出特征矩阵;
23、确定在所述不同尺寸以及不同数量层级化窗口中采用滑动窗口,得到多个输出特征矩阵;
24、将多个输出特征矩阵进行聚合连接,得到所述双时相影像多尺度特征。
25、根据本发明提供的一种多尺度特征融合耕地变化检测方法,基于先验引导的变化特征及不变特征增强方法,提取所述双时相影像多尺度多级特征的双时相影像多级差异特征,包括:
26、计算所述双时相影像多尺度多级特征之间的余弦相似性,得到双时相特征先验信息;
27、基于所述双时相特征先验信息,对所述双时相影像多尺度多级特征中的变化特征及不变特征进行特征增强,得到增强后双时相特征;
28、利用多层感知机对所述增强后双时相特征进行融合,提取所述双时相影像多级差异特征。
29、根据本发明提供的一种多尺度特征融合耕地变化检测方法,基于所述双时相特征先验信息,对所述双时相影像多尺度多级特征中的变化特征及不变特征进行特征增强,得到增强后双时相特征,包括:
30、确定所述双时相影像多尺度多级特征的第一时相影像多尺度多级特征和第二时相影像多尺度多级特征;
31、计算所述第一时相影像多尺度多级特征和所述第二时相影像多尺度多级特征之差的绝对值得到特征差,以及所述第一时相影像多尺度多级特征和所述第二时相影像多尺度多级特征之和得到特征和;
32、分别计算所述双时相特征先验信息与所述第一时相影像多尺度多级特征的第一变化区域增强特征和第一不变区域增强特征,以及所述双时相特征先验信息与所述第二时相影像多尺度多级特征的第二变化区域增强特征和第二不变区域增强特征;
33、将所述第一变化区域增强特征、所述第一不变区域增强特征、所述第二变化区域增强特征、所述第二不变区域增强特征、所述特征差和所述特征和依次进行聚合连接、通道注意力计算以及利用多层感知机进行融合,得到所述增强后双时相特征。
34、根据本发明提供的一种多尺度特征融合耕地变化检测方法,对所述双时相影像多级差异特征进行多级特征融合构建耕地变化特征图,采用预设深监督策略得到所述耕地变化特征图的变化检测结果,包括:
35、对所述双时相影像多级差异特征进行逐级解码恢复,得到多个耕地变化特征图,其中每个耕地变化特征图的大小随着网络的加深逐渐减小;
36、采用交叉熵损失函数,确定通过分类器对所述多个耕地变化特征图进行逐像素分类,得到所述变化检测结果。
37、第二方面,本发明还提供一种多尺度特征融合耕地变化检测系统,包括:
38、多尺度特征提取模块,用于采集待检测耕地的双时相光学遥感影像,对所述双时相光学遥感影像进行多尺度特征提取,得到双时相影像多尺度多级特征;
39、差异特征提取模块,用于基于先验引导的变化特征及不变特征增强方法,提取所述双时相影像多尺度多级特征的双时相影像多级差异特征;
40、融合检测模块,用于对所述双时相影像多级差异特征进行多级特征融合构建耕地变化特征图,采用预设深监督策略得到所述耕地变化特征图的变化检测结果。
41、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述多尺度特征融合耕地变化检测方法。
42、本发明提供的多尺度特征融合耕地变化检测方法及系统,针对目标耕地中存在多个小变化目标导致变化检测中存在边界模糊和边缘不明确的问题,采用多层级滑动窗口获取多尺度多级特征,并利用同时针对变化特征和不变特征进行特征增强,提高了变化区域的显著性,从而大大减少小变化目标被漏检和误检的概率。
- 还没有人留言评论。精彩留言会获得点赞!