一种基于粗精特征筛选的视觉图像定位方法
本发明属于室内定位技术,具体涉及一种基于粗精特征筛选的视觉图像定位方法。
背景技术:
1、随着移动通信技术与无线网络的发展,基于位置的服务(location basedservices,lbs)在现代人的生活中起着至关重要的作用。全球定位系统(globalpositioning system,gps)和基于蜂窝基站的定位技术基本满足了用户在室外场景中对位置服务的需求。近年来,位置服务的相关产业需求正从室外向室内发展,具有巨大的商业潜能。然而,室内场景受到建筑物的遮挡,gps信号会快速衰减,甚至完全无法接收,全球定位系统无法应用于室内场景中。因此,基于wi-fi、红外线、射频识别(radio frequencyidentification,rfid)、蓝牙、超宽带(ultra wide band,uwb)等的室内定位技术应运而生,视觉图像定位也因其成本低、精度高等优势开始受到广泛关注,逐渐成为室内定位技术的主流。
2、基于视觉图像的定位技术其原理是利用实时图像和过去图像之间的关联性来估计目标用户的位置。具体地,首先在各参考点处采集图像集,进行特征提取,构建样本特征数据库;然后将当前时刻的图像特征与已构建的样本特征数据库进行相似性匹配;最后,选择相似度较高的特征所对应的位置集,解算出用户的位置坐标。然而,由于图像集的数量庞大,传统的特征提取算法往往具有开销大且耗时的缺点,大量的特征信息冗余导致图像的误匹配率高,尤其是对于环境比较复杂的场景,定位精度不够理想。由此可知,基于视觉图像的定位方法的关键在于如何快速又准确地实现图像的特征提取。
3、为了提高特征提取的效率,本发明提出了一种基于粗精特征筛选的视觉图像定位方法。在特征提取之前先采用基于直方图的筛选方法筛选掉大部分不可能的参考点,只保留与当前图像相似性较高的参考点数据集,缩小匹配范围;再利用加速稳健特征算法提取特征,进一步筛选掉能量低和不感兴趣的特征点;最后用最能代表图像信息的特征描述子来作为相似性度量以进行图像匹配,选择特征相似度最高的参考点位置集作为最终定位结果。本发明提出的特征筛选方法极大程度上提升了特征提取的效率,克服了传统视觉图像定位开销大、误匹配率高的问题。
技术实现思路
1、本发明的目的是提供一种基于粗精特征筛选的视觉图像定位方法。在离线阶段,设置均匀分布的锚节点并环绕四周拍摄图像,然后进行特征提取以构建离线数据库;在在线阶段,提取训练图像和测试图像的特征信息以进行匹配,在融合算法定位范围内,将匹配率最高的锚节点作为定位结果,该方法在均衡系统开销的同时保证了定位精度。
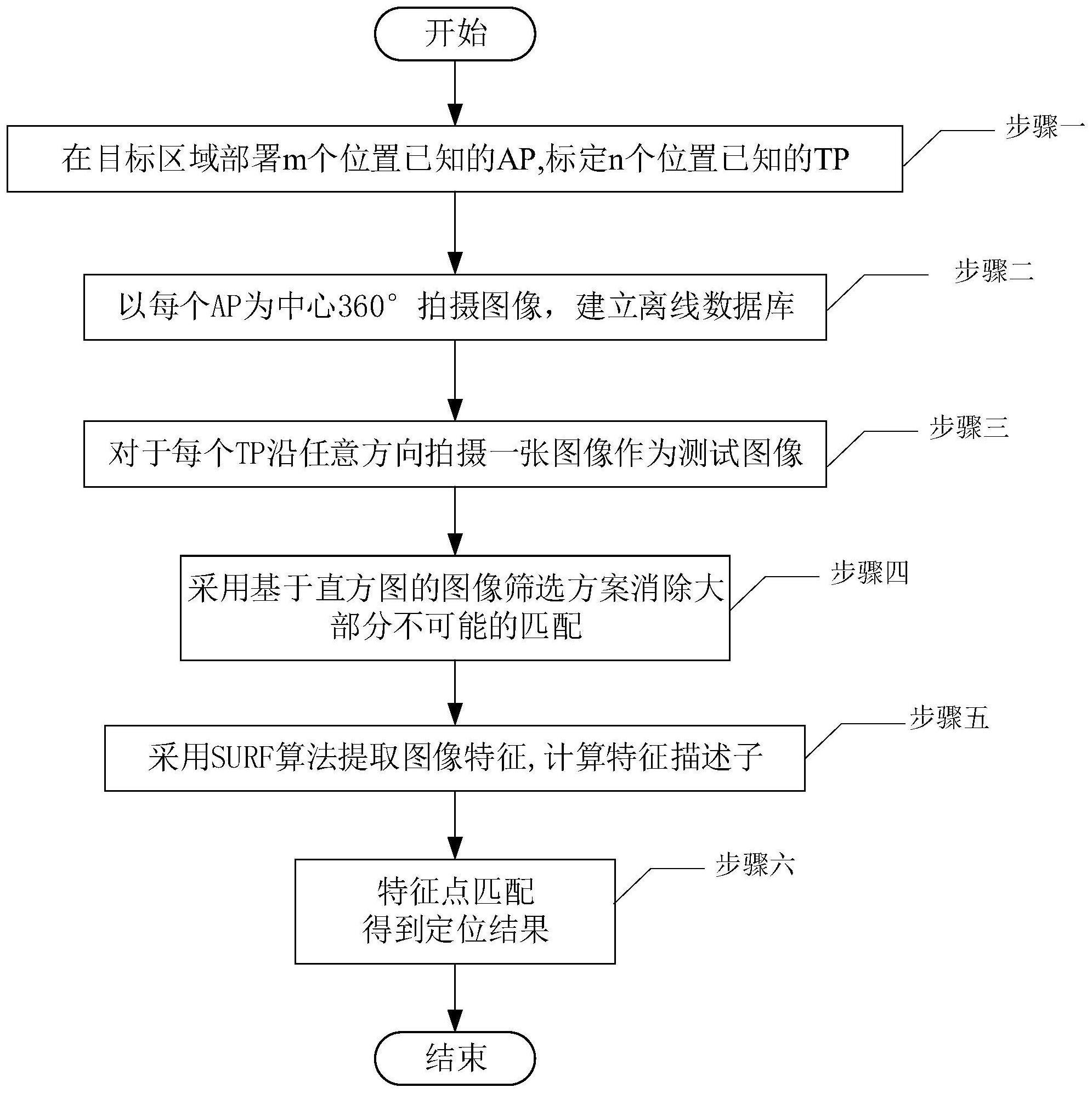
2、本发明所述的一种基于粗精特征筛选的视觉图像定位方法,包括以下步骤:
3、步骤一、在目标区域内放置m(m≥1,m为整数)个位置已知的锚节点(accesspoint,ap),记为ap1,…,apm,第j个ap记为apj(j≤m,j为整数)。锚点之间的距离设为1m,锚点可以设置在较为开阔的空间,如走廊的交汇处,并应均匀布置,避免定位盲区。
4、步骤二、分别以每个锚节点为中心360°拍摄图像,每个图像的宽度为1920像素,角度偏差为7.3度,两个相邻图像之间的位移为200像素,一个锚节点共拍摄49张图像作为一个训练集。将这些训练集进一步划分为重叠的全高清尺寸视图,这些视图作为离线数据库用于后续与测试集的特征匹配。
5、步骤三、在空间内锚节点周围标定n(n≥1,n为整数)个测试点(testing point,tp),依次表示为tp1,tp2,...,tpn。对于每个测试点,沿任意方向拍摄一张图像作为测试图像。每个测试图像将用于与训练集的特征匹配,以确定与测试点匹配率最高的锚点作为定位结果。
6、步骤四、采用基于直方图的图像筛选方案来消除大部分不可能匹配。具体包括以下步骤:
7、步骤四(一)、将每个锚节点的地标图像和定位图像分别划分为10个子区域,对图像进行灰度处理,即:
8、f=0.3r+0.59g+0.11b (1)
9、基于加权平均法对数字图像进行灰度处理得到灰度图像,按照一定的灰度像素宽度划分0~255形成灰度区间,统计灰度图像中灰度区间内所有灰度像素的数量,形成灰度直方图,并对图像的直方图进行归一化。依据格网点坐标和对应的图像灰度直方图建立图像特征库,数据结构设计见表1。
10、表1数据结构设计
11、
12、步骤四(二)、采用巴氏系数(bhattacharyya)作为直方图相似性的度量,索引值越高(0~1),表示相似性越高。计算每个测试图像与训练集的巴氏系数取平均值,以保留图像的结构信息。巴氏系数计算公式如下:
13、
14、其中,h1,h2分别为查询图像和参考图像在数据库中的视觉向量。
15、步骤四(三)、对于每一张测试图像,都能与训练集中的训练图像进行直方图相似性匹配。匹配对中巴氏系数大于阈值(本发明设置为0.6)且为局部最大值的视图将被用于下一阶段的详细匹配。
16、步骤五、采用加速稳健特征(speeded up robust features,surf)算法提取上一步筛选后的训练集和测试图像的特征信息,计算特征描述子。具体步骤如下:
17、步骤五(一)、对图像进行高斯平滑滤波,使特征点具备尺度无关性。高斯函数的高阶微分与离散图像的图像函数f(x,t)做卷积运算时相当于使用高斯滤波模板对图像做滤波处理。具体公式如下:
18、l(x,y)=g(t)*f(x,t) (3)
19、其中l(x,y)表示的是一幅图像在不同解析度下的表示,其本质表示的就是原始图像在不同尺度高斯核平滑之后的高斯平滑图像,可以利用高斯核g(t)和图像函数f(x,t)在点x的卷积来实现。
20、步骤五(二)、构建hessian矩阵。hessian矩阵h是函数的二阶偏导数组成的方块矩阵,描述了函数的局部曲率。构建hessian矩阵的目的是生成图像稳定的边缘点。对于图像中的每一个像素点,都可以求出一个h矩阵。对于一个图像f(x,y),其hessian矩阵可以表示为:
21、
22、在构造hessian矩阵前需要对图像进行高斯滤波,经过滤波后的hessian矩阵表述为:
23、
24、步骤五(三)、提取特征点。当hessian矩阵的判别式取得局部最大值时,判定当前点是比周围邻域内其他点更亮或更暗的点,由此来确定关键点的位置。hessian矩阵的判别式det(h)可以表示为:
25、det(h)=lxx*lyy-lxy*lxy (6)
26、由于高斯核实服从正态分布,从中心点往外,系数越来越低。为了提高运算速度,surf使用盒式滤波器(boxfilter)来近似替代高斯滤波器,它对图像的滤波转化成计算图像上不同区域间像素和的加减运算问题,只需要简单几次查找积分图就可以完成。如图2所示,对于σ=1.2的盒式滤波器,设定模板的尺寸为9×9的大小,并用它作为最小尺度空间值对图像进行滤波和斑点检测,将hessian矩阵的行列式作如下的简化:
27、
28、滤波器响应的相关权重ω是为了平衡hessian行列式的表示式。这是为了保持高斯核与近似高斯核的一致性。
29、
30、其中|x|f为frobenius范数。理论上来说对于不同的σ和对应尺寸的模板尺寸,ω值是不同的,但为了简化起见,可以认为它是同一个常数。
31、步骤五(四)、得到稳定的特征点。将经过hessian矩阵处理过的每个像素点与二维图像空间和尺度空间邻域内的点进行比较,在尺度空间中先初步提取出在尺度空间和二维图像空间上都是局部极值点的特征点,再滤除掉能量低的不稳定的和错误的特征点,得到稳定的特征点。如果两个特征点的判别式正负号相同,代表这两个特征具有相同方向上的对比度变化,如果不同,说明这两个特征点的对比度变化方向相反。
32、步骤五(五)、计算特征描述子。如图3所示,根据特征点周围邻域内所有像素的梯度方向,生成梯度方向直方图,取梯度直方图的主要分量所代表的方向作为特征点的方向,作为特征的描述子,这样每一个特征点都可以用向量来表示。
33、步骤六、特征点匹配。计算训练集与测试集两组图像特征点描述子的欧氏距离,欧氏距离越小,表明两个特征点的匹配度越好,小于设定阈值(本发明设置为0.06)时,可以认为匹配成功。计算每个锚点的训练集与测试图像的匹配率,匹配率最高的锚点位置可以近似为图像定位结果。
34、有益效果
35、本发明从图像的相似性出发,首先,在目标区域内部署多个锚节点并以环绕的方式构建训练集;其次,采用基于直方图的图像筛选法和surf特征点匹配算法提取训练集和测试集图像的特征点;最后,计算两组图像特征描述子的欧氏距离并选择与测试点的匹配率最高的锚点作为图像定位结果。本发明提高了图像特征匹配的成功率,同时有效地提升了定位系统性能。
- 还没有人留言评论。精彩留言会获得点赞!