一种支持多设备多场景的路径规划方法与流程
本技术涉及车辆路径规划,具体涉及一种支持多设备多场景的路径规划方法。
背景技术:
1、目前,物流是生产流程中不可或缺的一环。无论生产前的原料,还是生产后的产品,甚至是生产中的半成品,都需要及时的供应和转移,避免生产中断或延误,提高生产效率。于是,根据不同的生产场景合理安排物料的转运路径对整个生产流程起到了至关重要的作用。那么作为整个物流环节最为核心的路径规划,就成了当前迫切需要解决的课题。
2、据了解,现有的针对工业场景最常见的路径规划仅仅只是提前配置好的固定路径或者只是根据节点简单的规划出一条可用路径。生产型企业往往会根据生产不同的产品对仓库或者车间的布局进行规划,也会定制不同类型的物流agv进行物流转运。如果不能合理的规划路径,那么物流效率就会低下,就会导致生产节拍不达标、交货延误等一些列问题。
3、因此,亟需一种有效的动态路径规划,可以保证生产节拍的达标,实现整个物流转运的时效性。
技术实现思路
1、本技术提供了一种支持多设备多场景的路径规划方法,实现针对不同类型agv在不同场景的路径规划,提供物流的灵活性,提高工厂整体生产效率该技术方案如下。
2、一方面,提供了一种支持多设备多场景的路径规划方法,所述方法包括:
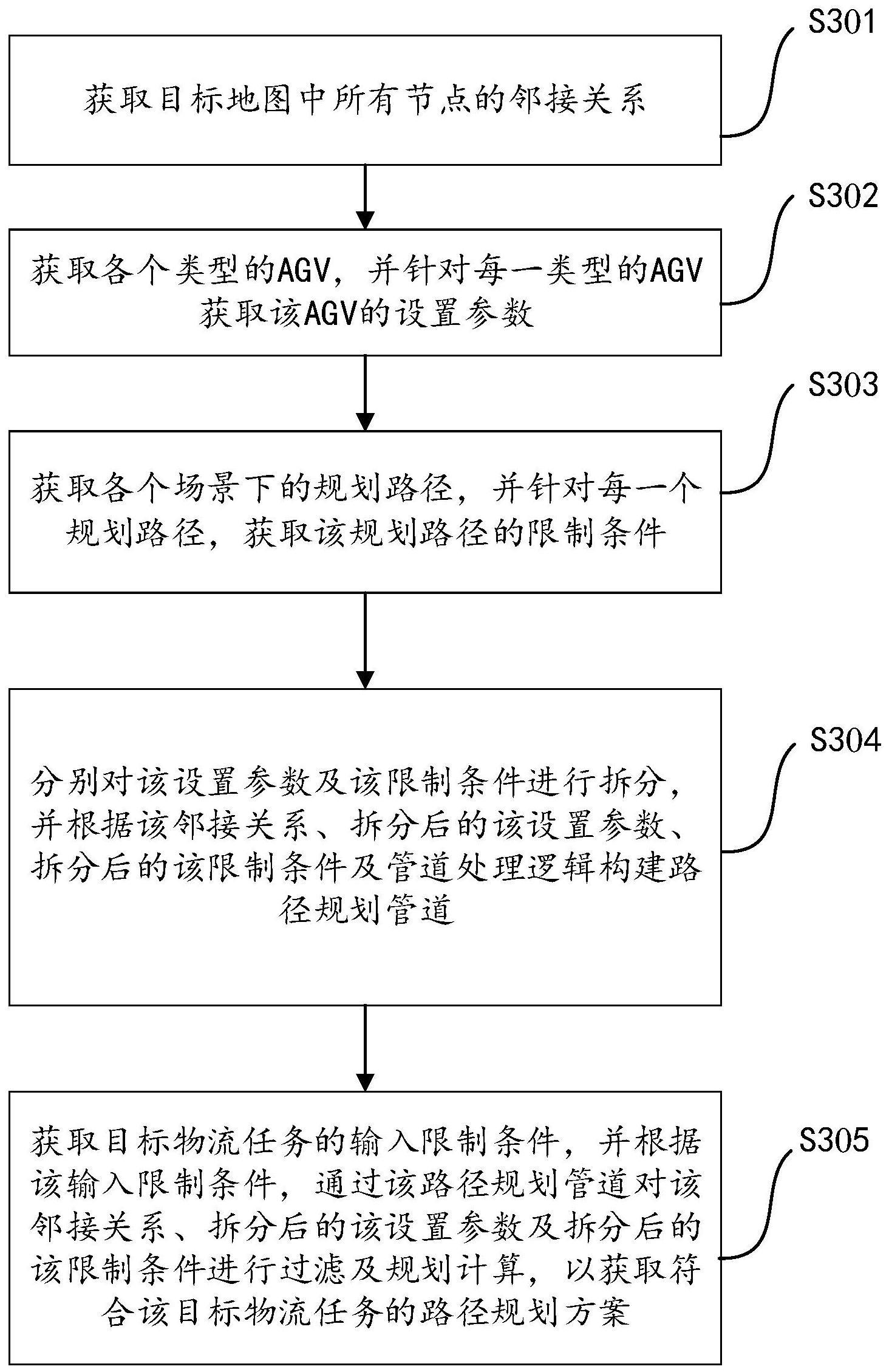
3、获取目标地图中所有节点的邻接关系;
4、获取各个类型的agv,并针对每一类型的agv,获取所述agv的设置参数;
5、获取各个场景下的规划路径,并针对每一个规划路径,获取所述规划路径的限制条件;
6、分别对所述设置参数及所述限制条件进行拆分,并根据所述邻接关系、拆分后的所述设置参数及拆分后的所述限制条件构建路径规划管道;
7、获取目标物流任务的输入限制条件,并根据所述输入限制条件,通过所述路径规划管道对所述邻接关系、拆分后的所述设置参数、拆分后的所述限制条件及管道处理逻辑进行过滤及规划计算,以获取符合所述目标物流任务的路径规划方案。
8、又一方面,提供了一种支持多设备多场景的路径规划装置,所述装置包括:
9、邻接关系获取模块,用于获取目标地图中所有节点的邻接关系;
10、设置参数获取模块,用于获取各个类型的agv,并针对每一类型的agv,获取所述agv的设置参数;
11、规划路径的限制条件获取模块,用于获取各个场景下的规划路径,并针对每一个规划路径,获取所述规划路径的限制条件;
12、路径规划管道构建模块,用于分别对所述设置参数及所述限制条件进行拆分,并根据所述邻接关系、拆分后的所述设置参数、拆分后的所述限制条件及管道处理逻辑构建路径规划管道;
13、路径规划方案获取模块,用于获取目标物流任务的输入限制条件,并根据所述输入限制条件,通过所述路径规划管道对所述邻接关系、拆分后的所述设置参数及拆分后的所述限制条件进行过滤及规划计算,以获取符合所述目标物流任务的路径规划方案。
14、在一种可能的实施方式中,所述agv的设置参数包括agv是否可以旋转、agv是否可以平移、agv起始角度及agv停靠终点角度。
15、在一种可能的实施方式中,所述规划路径的限制条件包括地图编号、邻接点类型、禁止通行的节点列表、禁止通行的道路列表、必须经过的节点列表以及生成路线方式。
16、在一种可能的实施方式中,所述管道处理逻辑为所述路径规划管道包括过滤管道、数据格式管道、算法类管道、管制数据管道及动作算法管道中的至少一者;
17、其中,所述过滤管道,用于根据所述限制条件对不同邻接点集合、路径必经点、禁止通行点、禁止通行道路进行过滤处理,以获取符合所述限制条件的目标邻接点集合;
18、所述数据格式管道,用于对所述目标邻接点集合进行数据格式的转换;
19、所述管制数据管道,用于计算所述目标邻接点集合中各个邻接点的拥挤程度;
20、所述算法类管道,用于初始化点位数据、计算所述目标邻接点集合中各个邻接点的权重及最优路径;
21、所述动作算法管道,用于计算所述agv在行驶过程中的行驶动作。
22、在一种可能的实施方式中,所述算法类管道包括初始化点位管道及最短路径管道;
23、其中,所述初始化点位管道,用于进行点位的初始化赋值;
24、所述最短路径管道,用于计算所述目标邻接点集合中各个邻接点的权重,并根据所述各个邻接点的权重,获取所述目标物流任务对应的最优路径。
25、在一种可能的实施方式中,所述路径规划管道还包括对象池;
26、所述对象池用于存放指定数量的邻接点集合,以便在路径规划时对各个邻接点集合进行重复使用。
27、在一种可能的实施方式中,所述路径规划方案获取模块,还用于:
28、根据所述输入限制条件,通过所述过滤管道构建节点优先队列,并获取所述节点优先队列对应的目标邻接点集合;
29、根据点与点之间的距离以及所述目标邻接点集合中各个邻接点的拥挤程度,通过所述最短路径管道获取各个邻接点的权重;
30、根据agv的当前角度、点与点之间的角度及点与点之间的连接关系,通过所述最短路径管道获取agv通过各个连接段的权重;
31、根据所述各个邻接点的权重及所述agv通过各个连接段的权重,通过所述最短路径管道获取所述目标物流任务对应的最优路径。
32、在一种可能的实施方式中,所述装置还用于:
33、根据所述agv的车头角度以及点与点之间的移动方向,通过所述动作算法管道获取所述agv的行驶方向;
34、根据所述agv当前节点的前一邻接点的车头角度以及后一邻接点的车头角度,通过所述动作算法管道对所述agv进行赋予动作;
35、根据所述agv的所述行驶方向及所述agv的赋予动作,通过所述动作算法管道更新所述agv在所述最优路径的行驶过程中车头移动方向。
36、在一种可能的实施方式中,所述路径规划方案获取模块,还用于:
37、获取目标物流任务对应的目标agv类型以及目标规划路径;
38、根据所述目标agv类型的设置参数以及所述目标规划路径的限制条件,获取目标物流任务的输入限制条件。
39、再一方面,提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述的一种支持多设备多场景的路径规划方法。
40、又一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述的一种支持多设备多场景的路径规划方法。
41、再一方面,提供了一种计算机程序产品或计算机程序,所述计算机程序产品或计算机程序包括计算机指令,所述计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质中读取所述计算机指令,处理器执行所述计算机指令,使得所述计算机设备执行上述一种支持多设备多场景的路径规划方法。
42、本技术提供的技术方案可以包括以下有益效果:
43、获取各个类型的agv,并针对每一类型的agv,获取该agv的设置参数;获取各个场景下的规划路径,并针对每一个规划路径,获取该规划路径的限制条件;分别对该设置参数及该限制条件进行拆分,并根据拆分后的该设置参数及该限制条件构建路径规划管道;获取目标物流任务的输入限制条件,并根据该输入限制条件,通过该路径规划管道对拆分后的该设置参数及该限制条件进行过滤及规划计算,以获取符合该目标物流任务的路径规划方案。上述方案通过路径规划管道的构建,动态规划工位与工位之间用时最短的路径,提高工厂整体生产效率,实现针对不同类型agv在复杂场景的路径规划,提供物流的灵活性,规划路径所需要的时间时相当短,可以适应大多数的工业场景。
- 还没有人留言评论。精彩留言会获得点赞!