一种基于物联网的智慧农业设备管理系统及方法与流程
本发明涉及农业设备领域,具体为一种基于物联网的智慧农业设备管理系统及方法。
背景技术:
1、物联网技术将传感器信息通过互联网连接,实现万物互联,获取物体的各类信息,物联网的技术应用涉及到了各个领域,推动了智能化发展,提高了各个领域的行业效率;
2、智慧农业是将物联网技术运用在传统农业领域,实现农业现代化,以改善当前农业种植生产的状况的技术,旨在提高农业生产效率及提高农业生产的附加价值;智慧农业通过在生产领域的智能化、经营领域的差异性以及各方面的全面信息帮扶,实现传统农业产业链改造升级,实现无人化、自动化、智能化管理,帮助农业高效绿色精细发展,提高农业产业竞争力,可持续发展;
3、智慧农业发展的过程中,农业设备的机械化程度不断加深,农业生产效率快速提高,提高了农作物的产量,但在农作物种植生长过程中,农业设备对农作物种植灌溉培育操作不够精细,导致了农作物单位产量低,对资源利用率不够高,导致了资源错配,使得农场经济效率低,现提出一种基于物联网的智慧农业设备管理系统及方法,提高对农业资源的利用率,提高农作物的单位产量,提升经济效益。
技术实现思路
1、本发明的目的在于提供一种基于物联网的智慧农业设备管理系统及方法来解决上述背景技术中提出的问题,通过精准划分农场区域,合理设定农业设备位置,全程全景监测作物生长情况,选择合适的喷洒策略。
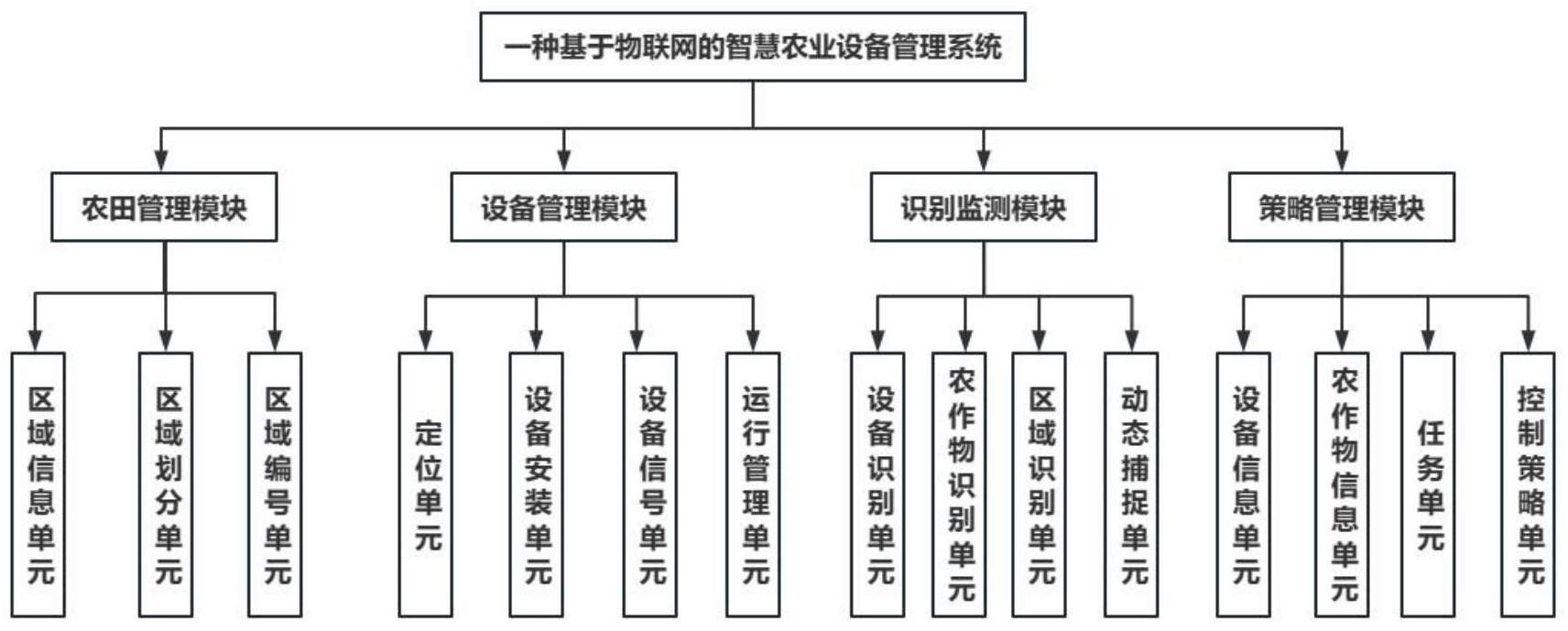
2、为了解决上述技术问题,本发明提供如下技术方案,一种基于物联网的智慧农业设备管理系统及方法,该管理系统包括:农田管理模块、设备管理模块、识别监测模块和策略管理模块;
3、所述农田管理模块与设备管理模块相连,所述识别监测模块与策略管理模块相连;所述农田管理模块用于采集农场区域信息,并划分农田耕作区域,所述设备管理模块确定农业设备安装位置,并监测管理,运行维护;所述识别监测模块基于全景监控摄像系统,监测农作物生长情况和设备运行状态;所述策略管理模块用于设定农业设备工作策略;
4、进一步的,所述农田管理模块包括区域信息单元、区域划分单元和区域编号单元;所述区域信息单元用于收集农田大小信息、土质信息、海拔信息和坡度信息,以便全面获取该农场耕地信息;所述区域划分单元基于区域信息,按照农作物生长过程中机械作业量,土地性质,合理划分区域范围,使得每块区域拥有相似的土地性质,每块区域总机械作业量相近;所述区域编号单元根据划分区域进行编号,并根据区域编号存储记录每个区域的信息,使得区域信息有序存储,方便系统进行管理;
5、进一步的,所述设备管理模块包括定位单元、设备安装单元、设备信号单元和运行管理单元;所述定位单元基于信号基站进行定位,根据信号强度变化进行精确定位,使得系统能够对农田里的设备和农作物精准定位,建立整个农田范围内的三维坐标系;所述设备安装单元对设备安装位置进行选定,使得设备工作范围能够完整辐射农田区域,并且设备平均工作效率满足辐射范围内生产需求;所述设备信号单元进行5g信号的快速传输,基于传输协议保障信息传输的鲁棒性;所述运行管理单元监测设备的日常运行情况,并监测农业设备是否正常工作;
6、进一步的,所述识别监测模块包括设备识别单元、农作物识别单元、区域识别单元和动态捕捉单元;所述设备识别单元对农业设备进行智能识别,基于农业设备的编号和定位,确定设备的相关信息,获取设备的状态;所述农作物识别单元识别区域内农作物种类,通过图像识别,计算农作物植株的密度,通过取代农作物植株粗略计算的方法,使得对植株数量的统计计算更加精准,更加准确地得到农作物的密度数据;所述区域识别单元根据区域编号和定位提供区域相关信息;所述动态捕捉单元捕捉范围内移动的设备或生物,并进行抽帧记录,使得农田区域上的作业动作都被捕捉并记录,方便日后查找;
7、进一步的,所述策略管理模块包括设备信息单元、农作物信息单元、任务单元和控制策略单元;所述设备信息单元将读取设备信息;所述农作物信息单元读取区域内农作物种类和密度信息;所述任务单元读取每日例行任务和额外加派任务,并下发到策略控制单元;所述控制策略单元根据需求进行设备控制策略的转变,使得设备工作满足任务需求,并整体提高工作效率;
8、一种基于物联网的智慧农业设备管理方法,包括下列步骤:
9、s1、根据农田大小和土地状况,计算农业设备机械工作量,划分农田区域;
10、s2、根据区域划分和区域内土地特点,确定农业设备最佳安装方案;
11、s3、利用农业监控设备,识别监测农作物种类和生长状况,监测管理设备工作状态;
12、s4、根据农作物种类和密度信息,设备工作状态信息,设定农业设备的喷洒策略;
13、进一步的,在步骤s1中,读取农田总面积数据和不同土壤数据,首先按照土壤性质,将农田划分为r块,再按照平均工作时间,进行具体划分,使得每块区域土壤性质相同,每块区域所需农业设备工作时间相近;读取农业设备功率,计算总的工作时间,设定农田总面积为m,单位面积机械做功为w,机械设备数量为n,坡度对工作效率影响系数为λ,农业设备机械输出功率为ρ,整块农田机械设备工作一轮时长为
14、
15、在区域划分时,设定划分区域块数为r,首先设定区域约束条件,对面积进行约束,设定一个区域最大面积不超过z1,最小面积不小于z2,所述z1和z2的值通过农场历史数据拟合得到;按照土壤性质设定约束条件,划分土壤性质相同的在一个区域;约束每块区域工作时间接近标准区域机械工作时间基于土地性质和现实中田地不规整程度的考量,划分区域的机械工作时间可在tr附近浮动,浮动值为tu,在约束条件下将农田具体划分为r块,将上述r块区域按照自前到后,自左到右的顺序进行排序编号,并放入集合p;
16、进一步的,在步骤s2中,基于区域土地特点,安装固定的农业喷洒设备,并排布输送线路;
17、在本步骤中,通过以下方式确定农业喷洒设备的安装位置,
18、s2011:为农场建立坐标系,在种植区域上按照固定距离确定点,所述点之间距离为m,m为设备喷洒后液体在压力下扩散的有效长度,赋予每个点坐标pi,j(pi,pj);
19、s2012:在坐标系内按照圆半径的距离生成圆心,u取正整数,按照从农场入口至农场出口的方向,顺时针生成圆心,同时在农场边界按照的距离取圆心,圆的半径为设备工作最长距离,设定圆心的坐标为ri,j(ri,rj);本步骤的目的是尽可能多的排布圆心,依照贪心算法思路,寻找可行的设备安装点,并不设定强约束条件;
20、s2013:移除设备无法安装位置的圆心,若土壤的坚固系数超过0.81,不进行农业喷洒设备安装;
21、s2014:在圆中找到一个能覆盖最多点的圆;
22、s2015:选择使用这个圆并移除所有被圆覆盖掉的点,标记这个圆;
23、s2016:遍历没有被移除的点,当所有点被遍历移除,将标记的所有圆心作为设备安装点;
24、在管道线路铺设过程中,确定喷洒设备安装点后,铺设一条液体运输管道,使得线路经过每个喷洒设备,且该线路最短;
25、s2021:采集ri,j设备安装点,设置离接口端最近一点为起点st,相距st最远一点为终点end,其余设备安装点放入中间点矩阵m,中间点个数为i+j-2;
26、s2022:对中间设备安装点做全排列,生成中间安装点序列,中间点的起点为m1,终点为mi+j-2;
27、s2023:对于中间节点序列,若有任意相邻节点有直接连接的边,则距离为该边在邻接矩阵中的权重,若没有直接连接的边,使用dijkstra算法进行最短路径搜索,若路径线路上包括了其他节点,将这些节点保存在路径中;将所有相邻节点之间的距离相加即得到中间点之间的最短路径;
28、s2024:使用dijkstra算法计算起点到中间点起点局部最短路径,计算中间点终点到终点最短路径,将三条路径相加,即运输管道铺设线路;
29、进一步的,在步骤s3中,根据农业监控设备,识别农场区域内农作物的种类和密度;根据农场作物生产的特点,农场作物通常密集排布,但每个植株之间存在一定距离,使得每个植株能够均匀接受灌溉和阳光,基于这一特点,现提出一种图像识别方法,精准识别农作物,并准确计算区域内农作物植株的数量,其图像识别步骤如下:
30、s301、引入centernet模型,将目标建立边界框中心点,并建立分支来回归边界框的方向,通过识别外观边界来确定植株,定向的边界框由下式定义:
31、
32、
33、
34、
35、其中(zx,zy)是中心点预测,是偏移量预测;(w,h)是尺寸预测,rm是旋转矩阵,改变向量方向但并不改变向量大小;sls、srs、slq和srq是边界框的四个角点,同时引入损失函数使得旋转角度回归,其中θ是目标旋转角,μ是预测旋转角,m是正样本数;将旋转角度的损失函数加入总体目标函数,
36、
37、其中lc是中心点识别的损失,lsize是尺度回归的损失,lsi是偏移回归的损失,和是系数常量,通常拟合得到,为0.1;该模型检测植株外观边界,并引入损失函数对不同角度的植株做出更好检测;
38、s302、基于物体与感受野的不匹配,提出一种特征选择模块,自适应地聚合不同尺寸的方向和长宽信息;
39、s302_1:使用具有不同卷积核的旋转卷积层提取多重属性,旋转卷积层;
40、s302_2:引入注意力机制,以position-wise方式融合特征,送入注意块获取注意图,在通道上进行concat,进行softmax操作获得归一化的选择权重,最后输出特征,可以将特征扩展到更多不同分支;
41、s303、优化检测头,使得模型根据不同农作物植株的样本做出响应,可以检测不同特征的植株;获取一个对象注意力过滤器,oa=ga(fin;β);fin是输入参数,oa是学习的样本的卷积核权重,ga是动态滤波器生成器,β是滤波器的参数集,再进行卷积计算,优化特征,最后得到分类预测
42、
43、其中f是卷积核处理得到的基本特征,∈用于控制细化范围,是一个常数,分类预测使得模型可以根据基本特征进行自适应的改进;
44、s304、基于检测结果,输出农作物植株类型和区域内农作物植株数量;
45、进一步的,在步骤s4中,根据不同区域农作物植株的不同密度,监测不同灌溉设备的工作状态,根据灌溉设备状态和灌溉要求,设置浇灌设备的浇灌策略,管理浇灌设备的工作模式;当灌溉设备处于工作状态时,设置为忙碌状态,否则设置为空闲状态,当系统或工作人员下发浇灌任务时,系统读取需要浇灌的区域p,检索可以覆盖浇灌p区域的灌溉设备,读取设备状态,若存在一台空闲设备,则调用该空闲设备完成浇灌任务,若存在多台空闲设备,设备数量为f,调用设备时,首先确定调用浇灌喷头的数量和位置,再确定浇灌水量;根据需要浇灌的区域与可供调用的浇灌喷头的位置,将需要浇灌区域进行划分,使得每块区域面积与设备数量的积等于浇灌区域面积;
46、设总用水量为dp,每块区域用水量为
47、
48、rc是有作物时的土壤水蒸发强度,植株处于初始生长期土壤水蒸发强度为rc1,快速发育期土壤水蒸发强度为rc2,发育中期土壤水蒸发强度为rc3,成熟期土壤水蒸发强度为rc4;e0为水面蒸发强度,h为地下水埋深,h0为潜水蒸发极限埋深(地下水埋深大于该值时,潜水蒸发弱,可忽略不计),mi为区域内植株数量,iw为单株需水量,通过识别植株类型可确定单株需水量,δ是湿度系数,可以拟合得到,rh是湿度;
49、总用水量为
50、
51、若不存在空闲设备,读取这些浇灌设备的工作时长,选取最快完成任务进入空闲状态的设备,加入等待队列,赋予浇灌任务;
52、与现有技术相比,本发明所达到的有益效果是:
53、本发明通过划分农田区域,设置农业设备安装节点,在确保农业区域任意位置都有农业设备覆盖的情况下,兼顾了农业设备最大化利用,运输管道铺设线路最短化,节约了农业设备资源,减少了农业资源运输损耗,提高了资源的利用率;利用全景监控系统,监测农田区域的活动情况,并准确识别农田各区域的农作物植株,精准计量植株数量,并根据实际农作物植株数量,生长周期、距离和湿度等情况设置浇灌量,满足了农作物生产所需,同时避免了漫灌的情况,减少了资源的浪费,并且最大化利用了农业设备,加快了灌溉喷洒任务的进度。
- 还没有人留言评论。精彩留言会获得点赞!