一种斜线扫描螺旋CT系统的反投影滤波图像重建方法
本发明属于射线断层成像,尤其涉及一种斜线扫描螺旋ct系统的反投影滤波图像重建方法。
背景技术:
1、计算断层成像(computed tomography,ct)是实现被测物体内部成像的无损检测技术,被广泛用于医疗、工业检测、安全检查、考古、农业、地球物理等众多领域。在实际的ct检测中,往往需要对大物体进行高分辨率成像,而传统的ct检测要求被测物体严格位于成像视场内,若被测物体尺寸过大,则需要适当地减小几何放大比,但便牺牲了成像分辨率,尤其是被测物体为不可或难以分割成小样本时,例如:化石,宝石,古董等珍贵物体。兼备大成像视场和大几何放大比(即高分辨率)一直是ct成像领域不断追求的关键目标之一。
2、以往的扩大视场ct成像主要采用偏置探测器的成像几何,然而,一方面,这种方法理论上最大只能扩大到两倍。另一方面,随着视场的扩大,冗余区间的减少,会导致成像质量变差;故实际应用中并不能扩大视场至理论值。
3、相比传统圆轨迹扫描模式,直线扫描易于控制精度和工程实现。公开号为cn104809750a的专利提出了一种结构简单、低成本、可移动/便携的直线扫描ct系统,系统采用射线源和探测器沿不同的方向平行移动的扫描方式,在低成本ct中具有潜力。为了实现对超出直线扫描ct视场的物体进行能够成像,公开号为cn106447740的专利提出了一种相对平行直线扫描ct感兴趣区域图像重建方法,该方法可对超出直线扫描ct视场的物体进行局部成像,但此方法不能对整个物体进行全域成像。为了增大几何放大比的同时增大横截面的成像视场,公开号为cn111839568a的专利提出了一种新型大视场直线扫描ct系统及图像重建方法。该系统通过固定探测器,通过沿直线轨迹平移x射线源器实现直线扫描,考虑到一段直线轨迹长度有限导致重建的有限角问题,设计了配合工件旋转几个角度实现横向大尺寸物体的完整成像。然而,由于该系统的多段直线扫描轨迹为同一平面内的直线段,无法在锥束ct成像中满足数据完备条件,实现横向视场的扩展,而无法实现轴向长物体的成像。实际上,该系统要实现更高的空间分辨率,即增大几何放大比,则会导致锥角变小。为避免轴向截断伪影,通常的措施是将锥束伪影外的数据截去,这样导致轴向成像的视场变窄。将上述发明沿长物体轴向进行逐块的三维重建和拼接,也能实现长物体的扫描成像;但该方法不仅扫描效率较低,还存在较大的配准误差。为实现螺旋锥束ct的扩大视场,即解决横向截断的扩大视场成像,也同时兼备轴向截断的长物体成像,邹晓兵在《大视场螺旋锥束工业ct的扫描方法与重建算法研究》中提出了横向截断的半覆盖螺旋锥束ct方式,并提出将螺旋锥束投影数据进行单层重排为扇束投影数据,然后采用二维扇束bpf算法进行重建,也进一步提出双螺旋锥束ct扫描方式,使待成像区域的横截面在每个投影视角下都能被射线束完全覆盖。实际上,邹晓兵研究的半覆盖螺旋锥束ct成像和双螺旋锥束ct扫描成像都是针对标准的螺旋轨迹,扩大视场的实质是通过探测器偏置的方式,当探测器偏置增大时重建图像质量恶化。公开号为cn102004111b的专利提出了一种倾斜多锥束直线轨迹ct成像方法,将多个锥束倾斜安装在不同位置,即需要多组射线源和探测器组,被检物体做直线运动穿过所有锥束,探测器采集从不同方向穿过物体的射线,其扫描方式成本高,不能获得轴向长物体的完备投影数据,无法对轴向很长的物体进行检测以及精确重建和扩大视野重建。公开号为cn111982939a的专利提出了一种可移动式多段直线光源ct成像系统及方法,其包括可移动的多个扫描段,且每个扫描段包括一个直线分布式光源阵列和一个直线探测器阵列,多个扫描段间配合且互相平行,以实现采集完备数据和扩大视野成像。
技术实现思路
1、为了满足对大物体和长物体的全域高分辨率ct成像需求,本发明旨在提供一种斜线扫描螺旋ct系统的反投影滤波图像重建方法,主要特征在于提供一种由多段轴向斜线组合的一种非标准螺旋扫描轨迹的反投影滤波图像重建方法,首先通过非标准螺旋ct系统获得轴向截断长物体和横向截断大物体的完备投影数据,为其精确图像重建提供支撑,且继承以往直线扫描ct系统的结构简单、易于高精度控制等优点,然后采用面向该系统的反投影滤波图像重建方法对获取的投影数据进行重建,得到高质量重建图像。
2、为了实现上述目的,本发明采用的技术方案是:
3、一种斜线扫描螺旋ct系统的反投影滤波图像重建方法,其特征在于,所述斜线扫描为一种非标准螺旋扫描,主要包括以下步骤:
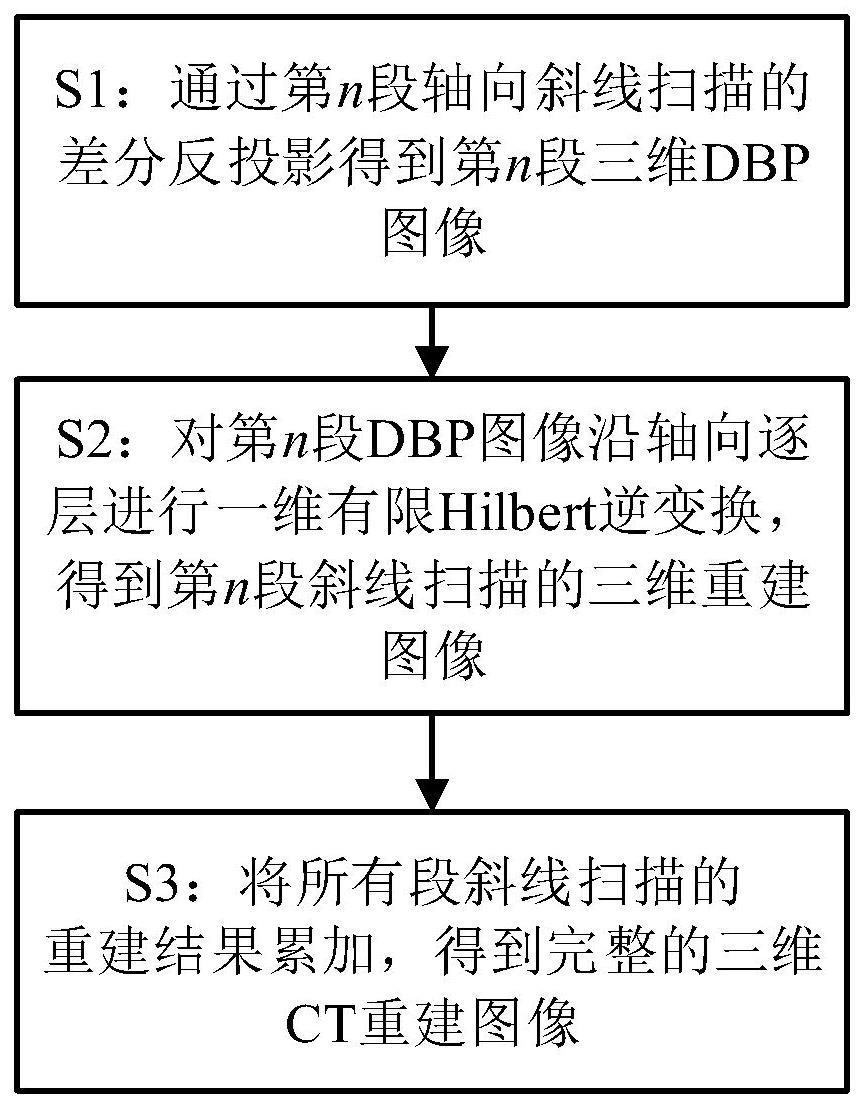
4、s1:通过第n段轴向斜线扫描的差分反投影(differentiated back-projection,dbp)得到第n段三维dbp图像其计算式如下:
5、
6、其中,λm为射线源射束的平移轨迹的半长;u为平板探测器的行向坐标;v为平板探测器的纵向坐标;z(λ)为射线源在第n段斜线扫描时在平板探测器上的纵向坐标,其满足式中l为斜线扫描螺旋轨迹从俯视角度呈现出的多边形边长(交线),其计算式满足:wθn(λ,u,v)是第n段斜线扫描锥束投影数据的冗余加权函数;pθn(λ,u,v)是第n段斜线扫描时射线源在斜线轨迹为λ位置的锥束投影数据,该位置射线源的射线穿过待重建点在平板探测器的行向坐标u*满足如下关系:
7、
8、s2:对第n段dbp图像沿轴向逐层进行一维有限hilbert逆变换,得到第n段斜线扫描的三维重建图像
9、
10、其中y1表示一维hilbert变换方向,y1∈[ly+εy,uy-εy],其中[ly,uy]表示hilbert变换的有限区间,εy为一个小正数;表示重建第n段有限角图像需要计算的未知常数,通过找出已知的一些位置点,将其经有限hilbert变换后的均值来作为
11、s3:通过以下公式将nr·t段斜线扫描的重建结果累加,得到完整的重建图像
12、非标准螺旋扫描轨迹为:
13、
14、其中,λi为射线源焦点在斜线轨迹上的坐标,λm为一段斜线轨迹的半长,即λi∈[-λm,λm],1≤i≤n,n表示每段斜线扫描的采样点数;θn为第n段等效射线源斜线平移轨迹与固定坐标系x轴正向的夹角,θn=(n-1)·δθ,n=1,2,...,nr·t,其中nr为扫描圈数,t为扫描一圈所需要的斜线轨迹段数,δθ由如下关系确定:δθ=2arctan(um/dod),进而t可由如下关系确定:t=ceil(2π/δθ),ceil(·)表示向上取整;z(λi,n)为射线源射束在固定坐标系z轴上的坐标,计算式为:
15、
16、其中,p为螺距,满足p=2zm/nr,其中zm为螺旋扫描轨迹(不包含相邻斜线轨迹交叉的冗余部分)的z轴向半长,需满足2zm≥zbody,zbody为被测物体的z轴向长度;hp为螺旋扫描轨迹的z轴向总高度,为第n段射线源斜线平移轨迹的旋转矩阵。
17、非标准螺旋扫描的横向扩大成像视场半径r1'为:
18、
19、其中,um为平板探测器行向的半长,r和dod分别为旋转台中心轴到射线源焦点和平板探测器中心的距离。
20、非标准螺旋扫描方法具体形式为:
21、s1:射线源的射束沿轴向倾角γ的斜线轨迹平移,平板探测器不动,实现一段斜线轨迹的锥束扫描;
22、s2:旋转台控制被测物体旋转角度间隔δθ,并垂直上升或下降间距h;
23、s3:继续步骤s1的一段斜线轨迹扫描,以此往复,直至形成以轴向斜线扫描为基础的并覆盖被测物体的非标准螺旋扫描轨迹。
24、一种应用于斜线扫描螺旋ct系统的反投影滤波图像重建方法的斜线扫描螺旋ct装置,其特征在于,包括:射线源、平板探测器、数据采集系统、计算平台、控制系统、机械运动系统;
25、机械运动系统为本系统的核心,其负责射线源的斜线平移和垂直升降,负责调整射线源斜线平移轨道的轴向倾角γ,负责平板探测器的垂直升降、水平位置以及进退距离的调整,负责旋转台的旋转、垂直升降、水平位置以及进退距离的调整,通过组合机械运动实现以轴向斜线扫描为基础的非标准螺旋扫描轨迹。
26、射线源射束的斜线轨迹平移扫描的实现形式为:射线源采用球管微焦点射线源,将其装配在射线源直线运动模组上进行精密平移运动;射线源直线运动模组由两端升降支撑台支撑,通过调整两端升降支撑台的高度调整射线源直线运动模组的轴向倾角γ,射线源在倾斜的射线源直线运动模组上逐步平移实现斜线扫描轨迹。
27、本发明的有益效果在于:
28、本发明能够对斜线扫描螺旋ct采集的投影数据进行三维ct图像重建,采用了反投影滤波算法思路,能够避免截断伪影,在较小螺距下实现横向截面大且轴向长的物体扫描与三维ct重建。
- 还没有人留言评论。精彩留言会获得点赞!