考虑中介轴承内外圈同时转动的支撑刚度确定方法及系统
本发明属于轴承系统,涉及一种考虑中介轴承内外圈同时转动的支撑刚度确定方法及系统。
背景技术:
1、作为旋转系统中承受载荷的关键部件,滚动轴承具有启动力矩小、消振降噪、易于更换等优点,广泛应用在汽车、航空航天等领域。现代航空发动机广泛采用双转子结构,其内、外转子之间通常采用滚动轴承作为中介轴承,用于支撑内、外转子的高速转动。滚动轴承将内、外转子联结,使内、外转子的动力学行为通过滚动轴承发生耦合,产生复杂的振动行为。
2、滚动轴承在旋转机构中既有支撑载荷的作用,又具有运动连接的作用,其刚度变化对于旋转系统的工作性能有着重要影响。轴承支撑刚度是指轴承在载荷作用下抵抗变形的能力,刚度特性是影响发动机转子支承系统动力学特性以及耦合振动特性的主要因素。在高速和重载条件下,中介轴承的支撑刚度随着承受的载荷和转速呈非线性变化,导致整个旋转系统的刚度和性能受到影响。因此,开展中介轴承关于支撑刚度计算方法的研究,对分析旋转系统的动力学特性及降低振动具有重要的意义。
3、由于轴承拟静力学模型涉及的方程是高度的非线性方程,求解的未知量数目较多,求解时经常遇到不收敛、求解速度慢等情况。因此相关学者提出了经验公式,用于计算轴承的刚度值。但经验公式只能对刚度的大小进行粗略估计,计算结果在理论和实际上存在偏差。此外,传统的滚动轴承刚度计算方法只能在静态条件下估计不同方向上的平移刚度,但在实际情况中,轴承动态运行条件下产生的弯曲变形和各个方向上的耦合变形也会直接影响轴承的性能。另一方面,现有的轴承刚度计算方法没有考虑轴承内、外圈支撑力和轴承内、外圈变形的耦合作用。现有技术中没有获取准确合理的支撑刚度,对轴承系统进行动力学建模,无法准确体现动力学特性,导致对轴承的振动及使用性能不能准确分析。
技术实现思路
1、本发明的目的在于提供一种考虑中介轴承内外圈同时转动的支撑刚度确定方法及系统,以解决现有的轴承刚度计算方法没有考虑轴承内、外圈支撑力和轴承内、外圈变形的耦合作用,无法获取准确合理的支撑刚度的问题。
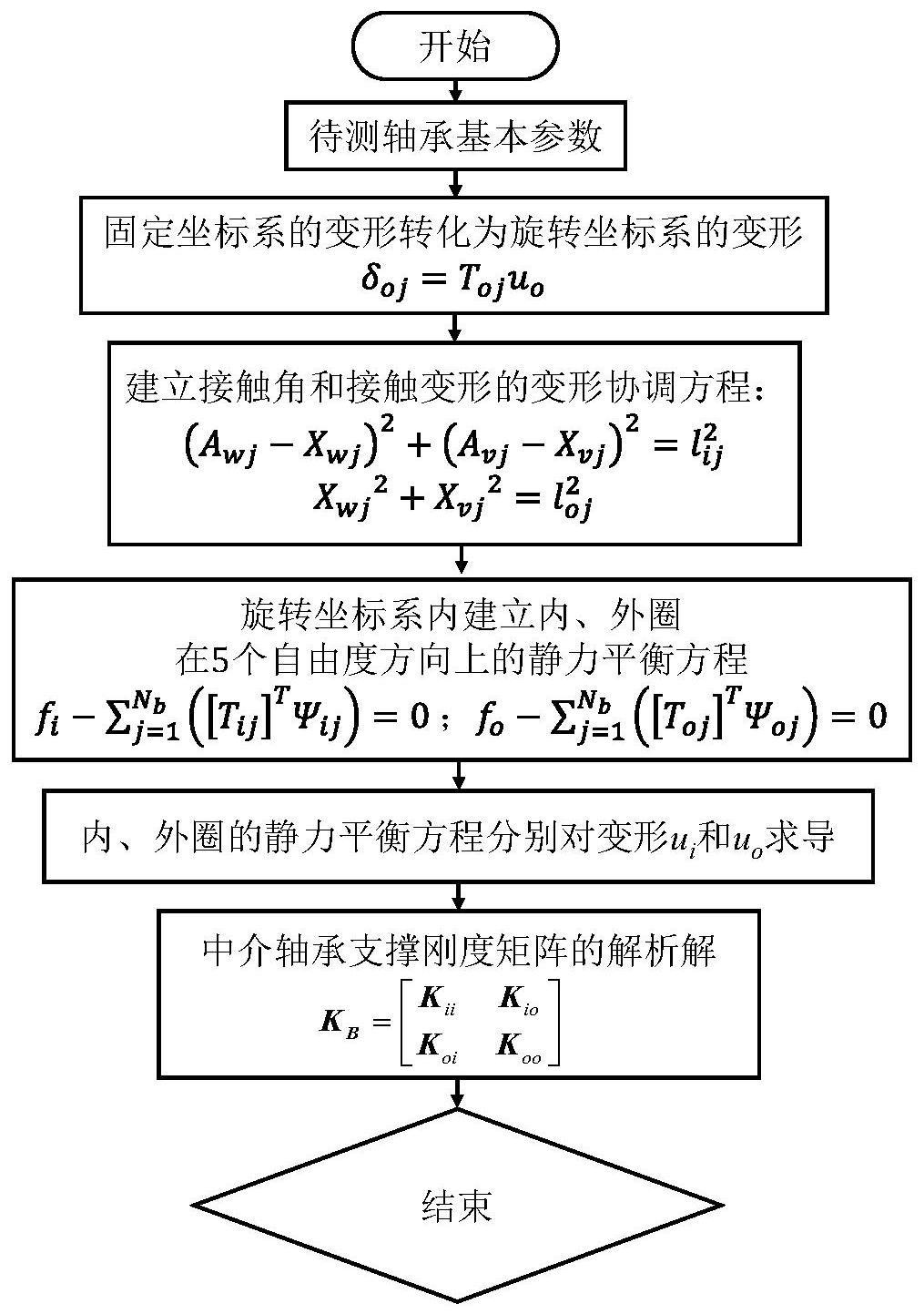
2、为了达到上述目的,本发明的基础方案为:一种考虑中介轴承内外圈同时转动的支撑刚度确定方法,包括如下步骤:
3、s1,获取轴承组件的基本参数;
4、s2,基于小变形假设条件,获取轴承内圈沟道中心oij、外圈沟道中心ooj在接触平面内的变形δij、δoj,与轴承内圈在固定坐标系中内圈变形ui和外圈变形uo的变换关系;
5、s3,根据内、外圈变形前后轴承内圈沟道曲率中心ij,和外圈沟道曲率中心oj在接触平面内几何关系,建立关于接触角βij、βoj和接触变形δij、δoj的变形协调方程;
6、s4,根据给定内、外圈在5个自由度方向的外力和外力矩向量,在旋转坐标系的v轴和w轴上分别建立内圈在5个自由度方向上的静力平衡方程和外圈在5个自由度方向上的静力平衡方程;
7、s5,根据步骤s4所述的内、外圈静力平衡方程中的轴承内、外圈支撑力fi和fo,分别对变形ui和uo求导,得到支撑刚度矩阵的解析解。
8、本基础方案的工作原理和有益效果在于:本技术方案研究轴承受载、变形位移的解析计算方法,根据滚动轴承运动学的基本原理和赫兹接触理论,建立轴承在给定速度和载荷边界条件下刚度的精确数学模型,推导出轴承完整的支撑刚度矩阵的解析公式,并充分考虑旋转机构高速转动时轴承支撑刚度的非线性和时变特性。
9、通过所提出方法推导轴承支撑刚度矩阵在非对角先上的耦合元素,充分体现弯曲变形和不同方向的耦合变形对受力的影响。本发明不仅计算了轴承内圈支撑力fi在内圈产生变形引起的支撑刚度矩阵、轴承外圈支撑力fo在外圈产生变形引起的支撑刚度矩阵,还计算了外圈支撑力fo在内圈产生变形引起的支撑刚度矩阵和内圈支撑力fi在外圈产生变形引起的支撑刚度矩阵,获取准确的支撑刚度矩阵的解析解。通过最优的参数设计轴承或研究对象,从而降低系统的振动,提升系统的运行性能。
10、进一步,所述轴承组件包括滚动体、轴承外圈和轴承内圈;
11、所述轴承组件的基本参数包括公称内经,径向间隙,初始接触角,滚子数目,内滚道曲率半径,外滚道曲率半径,径向和轴向载荷,弯矩,转速,转子偏心,轴承波纹度,以及支撑类型。
12、获取相应参数,利于后续使用。
13、进一步,步骤s2中获取变换关系的方法为:
14、定义固定坐标系x-y-z和旋转坐标系u-v-w,固定坐标系原点位于内、外圈旋转中心o;旋转坐标系原点位于第j个滚珠的几何中心oj;对内、外圈都转动的轴承,分别定义其内、外圈的5自由度矢量ui={xi,yi,zi,θxi,θyi}t和uo={xo,yo,zo,θxo,θyo}t;xi为内圈在x方向上的平动自由度;yi为内圈在y方向上的平动自由度;zi为内圈在z方向上的平动自由度;θxi为内圈绕x轴的转动自由度;θyi为内圈绕y轴的转动自由度;xo为外圈在x方向上的平动自由度;yo为外圈在y方向上的平动自由度;zo为外圈在z方向上的平动自由度;θxo为外圈绕x轴的转动自由度;θyo为外圈绕y轴的转动自由度;上标t表示矩阵的转置;
15、对于第j个滚珠,分别定义内、外圈沟道中心oij,ooj在接触平面内的3自由度矢量δij={vij,wij,θuij}t和δoj={voj,woj,θuoj}t;在第j个滚珠的旋转坐标系u-v-w下,vij为内圈滚道中心在v轴方向的平动自由度;wij为内圈滚道中心在w轴方向的平动自由度;θuij为内圈滚道中心在u轴方向的转动自由度;voj为外圈滚道中心在v轴方向的平动自由度;woj为外圈滚道中心在w轴方向的平动自由度;θuoj为外圈滚道中心在u轴方向的转动自由度;
16、在外力和外力矩作用下产生变形,轴承内圈沟道中心ooj在接触平面内的变形δoj在小变形假设条件下,满足变换关系,其关系表达式如下:
17、δoj=tojuo
18、其中,toj为轴承坐标变化矩阵。
19、操作简单,利于使用。
20、进一步,步骤s3中建立关于接触角βij、βoj和第j个滚珠分别与内、外圈的接触变形δij、δoj的变形协调方程如下:
21、根据内、外圈变形前后各中心在接触平面内的几何关系,当轴承内、外圈受力变形后,内圈沟道中心由ij移动到ij',外圈滚道中心由oj移动到oj',滚珠中心由bj移动到bj';
22、根据接触角βij、βoj和第j个滚珠与内、外圈的接触变形δij、δoj的几何关系得:
23、
24、简化后得到变形协调方程:
25、
26、其中,awj和avj根据几何关系可得到;
27、awj=(loj+lij)sinβ0+(wij-woj)
28、avj=(loj+lij)cosβ0+(vij-voj)-rl
29、lij=lij+δij
30、loj=loj+δoj
31、其中,rl为轴承径向间隙;loj和lij分别为外圈沟道中心oj和内圈沟道中心ij距滚珠中心bj距离;δij和δoj为第j个滚珠与内、外圈的接触变形;wij和vij为内圈在外力和外力矩作用下的变形ui导致的内圈沟道曲率中心ij在轴向和径向的位移;woj和voj为外圈在外力和外力矩作用下的变形uo导致的内圈沟道曲率中心oj在轴向和径向的位移;β0为第j个滚珠中心bj和轴承外圈沟道曲率中心oj在接触平面内形成的一条直线与轴承径向直线角度,即为轴承的名义接触角;xwj为变形后第j个滚珠中心bj'与外圈沟道曲率中心oj'在旋转坐标系中在w轴上的距离;xvj为变形后第j个滚珠中心bj'与外圈沟道曲率中心oj'在旋转坐标系中在v轴上的距离;awj为内、外圈变形后支撑轴承内圈沟道曲率中心ij'与外圈沟道曲率中心oj'在旋转坐标系中在w轴上的距离;avj为内、外圈变形后支撑轴承内圈沟道曲率中心ij'与外圈沟道曲率中心oj'在旋转坐标系中在v轴上的距离。
32、建立关于接触角βij、βoj和接触变形δij、δoj的变形协调方程,便于使用。
33、进一步,步骤s4中建立内圈在5个自由度方向上的静力平衡方程和外圈在5个自由度方向上的静力平衡方程的方法如下:
34、根据内、外圈在5个自由度方向的外力和外力矩向量fi={fxi,fyi,fzi,mxi,myi}t和fo={fxo,fyo,fzo,mxo,myo}t,fxi为内圈在固定坐标系x-y-z中在x方向上所受外力;fyi为内圈在固定坐标系x-y-z中在y方向上所受外力;fzi为内圈在固定坐标系x-y-z中在z方向上所受外力;mxi为内圈在固定坐标系x-y-z中在x方向上所受外力矩;myi为内圈在固定坐标系x-y-z中在y方向上所受外力矩;fxo为外圈在固定坐标系x-y-z中在x方向上所受外力;fyo为外圈在固定坐标系x-y-z中在y方向上所受外力;fzo为外圈在固定坐标系x-y-z中在z方向上所受外力;mxo为外圈在固定坐标系x-y-z中在x方向上所受外力矩;myo为外圈在固定坐标系x-y-z中在y方向上所受外力矩;
35、建立内、外圈在5个自由度方向上的静力平衡方程:
36、
37、其中,tij为关于内圈沟道中心的轴承坐标变化矩阵;toj为关于外圈沟道中心的轴承坐标变化矩阵;nb为滚珠数目;ψij={qijcosβij+fijsinβij,qijsinβij-fijcosβij,fijrgi}t和ψoj={-qojcosβoj-fojsinβoj,-qojsinβoj+fojcosβoj,fojrgo}t分别为内、外圈对第j个滚珠bj在接触平面内三个方向的接触力和力矩矢量,通过对内、外圈进行受力分析获取:
38、对内圈
39、
40、对外圈
41、
42、其中,φj是第j个滚子其圆周方向距x轴的角位置,ri为内圈旋转中心o到内圈沟道曲率中心ij沿v向的距离,ro为外圈旋转中心o到外圈沟道曲率中心oj沿v向的距离,rgi为轴承内圈沟道曲率半径,rgo为轴承外圈沟道曲率半径;qij、qoj分别为内、外圈对第j个滚珠的赫兹接触力;βij、βoj分别为滚珠与内圈沟道、外圈沟道的接触角;fij、foj分别为由滚珠回转力矩mgj引起的内、外圈对滚珠在接触平面内的等效摩擦力。
43、建立静力平衡方程,利于使用。
44、进一步,步骤s5中对变形ui和uo求导,得到支撑刚度矩阵的方法如下:
45、根据步骤s4中根据轴承内圈支撑力fi构建的静力平衡方程,对轴承内圈变形ui求导得到支撑轴承刚度矩阵kii:
46、
47、且
48、
49、
50、
51、
52、
53、其中,
54、
55、
56、
57、
58、
59、
60、其中,loj和lij分别为外圈沟道中心oj和内圈沟道中心ij距滚珠中心bj距离;δij和δoj为第j个滚珠与内、外圈的接触变形;kij和koj分别为内、外圈对第j个滚子赫兹接触刚度,可由接触刚度公式计算得到;χij和χoj分别为对应的接触系数,当接触变形δij或δoj大于0时,χij或χoj取1,否则取0;awj为内、外圈变形后支撑轴承内圈沟道曲率中心ij'与外圈沟道曲率中心oj'在旋转坐标系中在w轴上的距离;avj为内、外圈变形后支撑轴承内圈沟道曲率中心ij'与外圈沟道曲率中心oj'在旋转坐标系中在v轴上的距离;xwj为变形后第j个滚珠中心bj'与外圈沟道曲率中心oj'在旋转坐标系中在w轴上的距离;xvj为变形后第j个滚珠中心bj'与外圈沟道曲率中心oj'在旋转坐标系中在v轴上的距离;
61、根据轴承内圈支撑力fi构建的静力平衡方程,对轴承外圈变形uo求导得到支撑轴承刚度矩阵kio:
62、
63、且
64、
65、
66、
67、
68、
69、其中,
70、
71、
72、
73、
74、根据轴承外圈支撑力fo构建的静力平衡方程,对轴承外圈变形uo求导得到支撑轴承刚度矩阵koo:
75、
76、且
77、
78、
79、
80、
81、
82、其中,
83、
84、
85、
86、根据轴承外圈支撑力fo构建的静力平衡方程,对轴承内圈变形ui求导得到支撑轴承刚度矩阵koi:
87、
88、且
89、
90、
91、
92、
93、
94、其中,
95、
96、
97、
98、根据求解的kii、kio、koo和koi,得到内外圈同时旋转的中介轴承的支撑刚度矩阵kb:
99、
100、综合考虑,获取准确合理的支撑刚度矩阵,为航空发动机、车辆传动系统等双转子结构中中介轴承的动力学特性分析和高可靠性设计提供指导。
101、本发明还提供一种考虑中介轴承内外圈同时转动的支撑刚度确定系统,包括数据获取模块和处理模块,所述数据获取模块用于获取轴承组件的基本参数,数据获取模块的输出端与处理模块的输入端连接,所述处理模块执行本发明所述方法,获取中介轴承内外圈同时转动的支撑刚度。
102、利用该系统获取中介轴承内外圈同时转动的支撑刚度,操作简单,使用便捷。
- 还没有人留言评论。精彩留言会获得点赞!