一种高空间分辨率遥感影像阴影恢复方法及系统与流程
本发明涉及摄影测量与遥感学科中的数字图像处理,特别涉及一种高空间分辨率遥感影像阴影恢复方法及系统。
背景技术:
1、ikonos、quickbird、spot、pleiades、worldview、国产高分卫星及低空无人机遥感等高空间分辨率遥感影像(高分影像)以其精细的地物分辨能力,在资源环境遥感中发挥着重要作用。利用高分影像进行城市资源环境监测是城市资源环境规划、保护与管理的重要手段。然而,由于城区建筑阴影的广泛存在,城市高分影像中往往存在大量阴影,从而严重制约了高分遥感数据的高效利用。城市阴影在遥感影像上表现为低亮度区,并掩盖了阴影区的地物辐射特性。当利用高分影像进行城市土地利用分类、资源调查时,阴影区的存在很大程度地降低了地物分类精度,从而降低数据使用效率。同时,城市高分影像获取成本通常较高,较低的数据利用效率必然会增加数据使用成本。此外,由于城市阴影是固定的建筑等地物对太阳直接辐射遮挡产生的,而太阳方位角和高度角的变化规律也是固定的,会导致某些阴影区域在不同时期的遥感影像上会一直存在,从而形成城市遥感监测的永久盲区。因此,对高分遥感影像进行阴影恢复具有十分重要的现实意义。
2、遥感影像阴影恢复的经典方法主要有直方图匹配法(histogram matching)、伽玛(γ)校正法(gamma correction)以及均值方差变换法mvt(mean and variancetransformation)等。直方图匹配法是利用阴影区与临近非阴影区存在的相同地物进行直方图匹配,而后将该匹配参数应用于整个阴影区,从而实现阴影校正。该方法对开展直方图匹配的窗口大小比较敏感,并对阴影校正的结果产生较大影响。伽玛校正采用单一的γ因子用于整个阴影区,忽略了不同的阴影区背景地物的差异性特征。均值方差变换法(mvt)则假设阴影区和非阴影区存在线性关系,通过提取各自区域的统计变量(均值与方差)构建该线性关系,从而实现阴影区的校正。mvt法以其较高的校正精度和操作简单方便的特点,相对于其他阴影校正方法具有明显的优越性,应用较为广泛。然而阴影区和非阴影区光谱值之间并非严格意义上的线性相关,也难以用均值与方差两个变量对其相关关系进行准确描述,这是mvt法的不足之处。此外,mvt法用整个图像阴影区和非阴影区统计参数用于校正不同的阴影对象,同样忽略了不同阴影区背景地物的差异性,这方面也有待完善。
技术实现思路
1、本发明的目的是克服现有技术的上述不足,并基于自适应窗口分析,提供一种更加简明、高效、适应性更好的高空间分辨率遥感影像阴影恢复方法及装置。
2、本发明的技术方案是:首先提供了一种基于自适应窗口分析的高空间分辨率遥感影像阴影恢复方法,该方法包括以下步骤:
3、步骤1、遥感影像输入
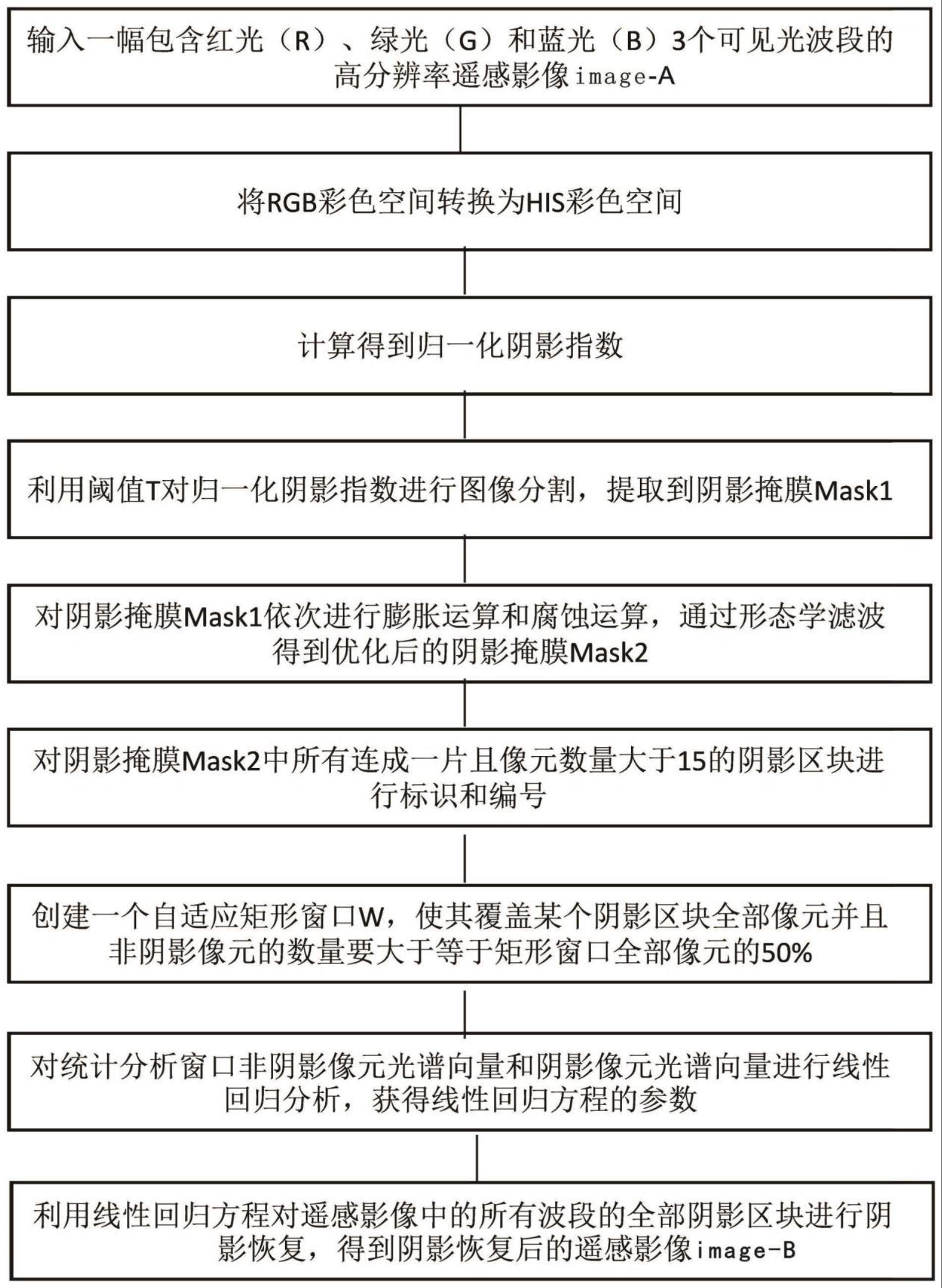
4、输入一幅包含红光(r)、绿光(g)和蓝光(b)3个可见光波段的高分辨率遥感影像image-a。
5、步骤2、his彩色空间变换
6、将rgb彩色空间转换为his彩色空间,变换公式如下:
7、
8、
9、
10、公式1、2和3中,h、i和s分别为his色彩空间中的色调、亮度和饱和度,r、g和b分别为遥感影像a的红光(r)、绿光(g)和蓝光(b)波段对应的dn值。
11、步骤3、计算归一化阴影指数
12、
13、公式4中,ndui是归一化阴影指数,i和s分别为his色彩空间中的亮度和饱和度。
14、步骤4、阴影检测提取
15、基于归一化阴影指数ndui,根据其均值和标准差特征,并通过人工交互判读来确定阴影分割阈值t,t的取值通常在0.31-0.36之间。利用阈值t对归一化阴影指数ndui进行图像分割,从而提取出遥感影像中的阴影区域信息,得到阴影掩膜mask1。
16、步骤5、阴影掩膜滤波
17、对阴影掩膜mask1依次进行膨胀运算和腐蚀运算,通过上述形态学滤波,消除阴影掩膜mask1中的细小图斑,得到优化后的阴影掩膜mask2。
18、步骤6、阴影区块标识
19、对阴影掩膜mask2中所有连成一片且阴影像元数量大于15的阴影区块进行标识和编号(i=1,2,3,…,n),并且使得每个阴影区块之间互不连接。
20、步骤7、确定统计分析窗口
21、设编号为i的阴影区块所对应的矩形图像r大小为n1×m1,以该矩形图像的几何中心为中心创建一个大小为n2×m2的自适应矩形窗口w(即统计分析窗口),矩形窗口w需满足2个条件:一是矩形窗口w需覆盖该阴影区块全部像元,即将n2≥n1且m2≥m1;二是自适应矩形窗口w中对应非阴影像元的数量要大于等于整个自适应矩形窗口w全部像元的50%,如不满足该条件则自适应矩形窗口w的窗口大小可逐渐扩大直到满足条件为止;例如,可对n2及m2的数值进行依次增加,每次加1。
22、步骤8、线性回归分析
23、对遥感影像中的某一个波段,分别统计自适应矩形窗口中全部阴影像元和非阴影像元的直方图、均值μ和标准差σ。按照特定规则从低到高分别取阴影像元的不同光谱值建立一个阴影像元光谱向量x(1,2,…,7),使得x1,x2,…,x7的值分别等于μ-2σ、μ-1.5σ、μ-σ、μ、μ+σ、μ+1.5σ和μ+2σ。根据阴影像元的直方图可获得阴影像元光谱向量x(1,2,…,7)对应的累计百分数向量ap1(1,2,…,7)。根据非阴影像元的直方图,搜索与阴影像元累计百分数向量ap1(1,2,…,7)中数值最接近光谱值,得到非阴影像元累计百分数值向量ap2(1,2,…,7),并建立相应的非阴影像元光谱向量y(1,2,…,7)。对某窗口中非阴影像元光谱向量y(1,2,…,7)和阴影像元光谱向量x(1,2,…,7)进行线性回归分析,获得该窗口的线性回归方程y=k×x+b的方程参数k和b的值。n个不同阴影区块分别对应着n个唯一的线性回归方程。
24、步骤9、阴影恢复
25、对某自适应矩形窗口利用其线性回归方程y=k*x+b对遥感影像image-a中的某一个阴影区块进行阴影恢复。
26、同理对遥感影像image-a中红光(r)、绿光(g)和蓝光(b)三个波段的全部阴影区块进行行阴影恢复,得到阴影恢复后的遥感影像image-b。
27、与现有技术相比本发明的有益效果:本发明提供的基于自适应窗口分析的高空间分辨率遥感影像阴影恢复方法,弥补了单一统计量难以准确表征非阴影区和阴影区之间光谱统计特性的不足,并充分考虑了不同阴影区背景地物的差异性,阴影恢复的结果具有很高的保真度,具有算法简单易行、稳定可靠和运算高效等优点。
28、本发明还提供了一种高空间分辨率遥感影像阴影恢复方法的实现装置,包括:
29、获取影像模块,输入一幅包含红光(r)、绿光(g)和蓝光(b)3个可见光波段的高分辨率遥感影像image-a。
30、his彩色空间变换模块,将rgb彩色空间转换为his彩色空间。
31、归一化阴影指数计算模块,计算得到归一化阴影指数。
32、阴影检测提取模块,利用阈值t对归一化阴影指数进行图像分割,从而提取出遥感影像中的阴影区域信息,得到阴影掩膜mask1
33、阴影掩膜滤波模块,对阴影掩膜mask1依次进行膨胀运算和腐蚀运算,通过形态学滤波得到优化后的阴影掩膜mask2。
34、阴影区块标识模块,对阴影掩膜mask2中所有连成一片且像元数量大于15的阴影区块进行标识和编号(i=1,2,3,…,n),并且使得每个阴影区块之间互不连接。
35、确定统计分析窗口模块,以阴影区块所对应的矩形图像几何中心为中心创建一个自适应矩形窗口w,使得矩形窗口w覆盖该阴影区块全部像元并且非阴影像元的数量要大于等于矩形窗口全部像元的50%。
36、线性回归分析模块,对统计分析窗口非阴影像元光谱向量y(1,2,…,7)和阴影像元光谱向量x(1,2,…,7)进行线性回归分析,获得该窗口的线性回归方程y=k×x+b的方程参数k和b的值。
37、阴影恢复模块,利用线性回归方程对遥感影像image-a中的所有波段的全部阴影区块进行阴影恢复,得到阴影恢复后的遥感影像image-b。
38、上述的高空间分辨率遥感影像阴影恢复系统,用于实现前述高空间分辨率遥感影像阴影恢复方法,并且可具体实现与方法相对应的有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!