一种基于TFT模型的舰船运动极短期预报方法及系统
本发明属于船舶与海洋工程,尤其涉及一种基于tft模型的舰船运动极短期预报方法及系统。
背景技术:
1、舰船在复杂海域的航行与作业中由于受到复杂海浪环境的影响,舰船海上航行与作业时的安全时刻受到威胁,因此针对各类海上作业场景的水面作业决策技术需求日益迫切。对于海洋航行和海上作业等应用场景,舰船运动时历的精确预报对于舰船工作的安全和高效至关重要。然而,舰船运动受到许多因素的影响,使得预测舰船运动时历变得更加困难。随着时间序列预测技术的发展,舰船运动极短期预报成为了一种重要的研究方向。舰船运动极短期预报是一种通过对船舶当前或过去的运动状态与一些外部环境条件的测量,提前预测未来一段时间内船舶的运动姿态,为海上作业提供指导的技术。然而,在过去的研究中,船舶运动极短期预报通常基于物理学模型、经验公式推导或时间序列分析等方法,这些方法存在许多问题,例如需要大量人工干预和经验积累、预测不准确和自适应性差等。因此,为了提高舰船运动时历的预测准确度和自适应性,融合将时间序列预测技术应用于船舶运动极短期预报已成为当前的研究热点。
2、对于船舶运动极短期预报工作,现有的技术手段主要包括水动力学模型方法、时间序列分析方法和深度学习模型方法。
3、与本发明较为接近的方案有:一种基于ar-olssvr模型的船舶运动预报方法(中国发明专利,公开号cn114564694a,公开日2022.05.31),该方案基于ar模型与舰船历史运动数据构建船舶运动预报模型对船舶运动进行预报,在此基础上进一步构建olssvr模型对ar模型的预报误差进行修正,用船舶运动预报模型获得的船舶运动预报值和用olssvr模型获得的ar模型回归误差预报值对应相加,作为最终的船舶运动预报值;一种基于lstm神经网络的船舶运动极短期预报方法及系统(中国发明专利,公开号cn113408711a,公开日2021.09.07),该方案基于lstm神经网络的船舶运动极短期预报方法通过获取初始数据,初始数据包括船舶运动本身数据、其他船舶运动姿态数据和波高数据,然后将初始数据进行预处理,以生成有效初始数据,然后根据有效初始数据分别采用多种预置的lstm神经网络模型对船舶运动进行预测,以生成多种预测结果,再将多种预测结果进行对比,以生成对比结果,并根据对比结果得到最终的预报结果信息,从而使得预测结果从多方面进行预测,并且将预测结果进行对比得到,各个预测结果之间的差异越小,说明预测结果更加可靠,从而提高了船舶运动极短期预报的准确性;一种数据驱动的海上船舶运动姿态实时预报方法(中国发明专利,公开号cn113156815b,公开日2022.05.20),该方案对横摇角纵摇角θ、首摇角ψ进行直接预报,对于纵向位置x、横向位置y和首摇角ψ,首先预报纵荡速度u、横荡速度v和首摇角速度r,进而得到纵向位置x、横向位置y和首摇角ψ的预报值,该方案利用实测的船舶运动状态时间序列信息,经过对该信息的信息挖掘和时间序列预报,且利用径向基函数神经网络的非线性拟合能力,得到更精确的海上船舶运动预报。
4、通过上述分析,现有技术存在的问题及缺陷为:目前已有的实现方案中,受预报模型自身结构的限制,对于时间序列中的缺失值和异常值的处理不够灵活,同时针对与舰船运动时历相关的非时间外部静态因素并未加以考虑,且这些预报模型多为黑箱模型,不具备可解释性。使得舰船运动时历的预测准确度和自适应性偏差。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种基于tft模型的舰船运动极短期预报方法及系统。涉及舰船运动极短期预报方法;具体涉及一种基于时序特征融合的自注意力深度网络舰船运动极短期预报方法。
2、所述技术方案如下:基于tft模型的舰船运动极短期预报方法,包括以下步骤:
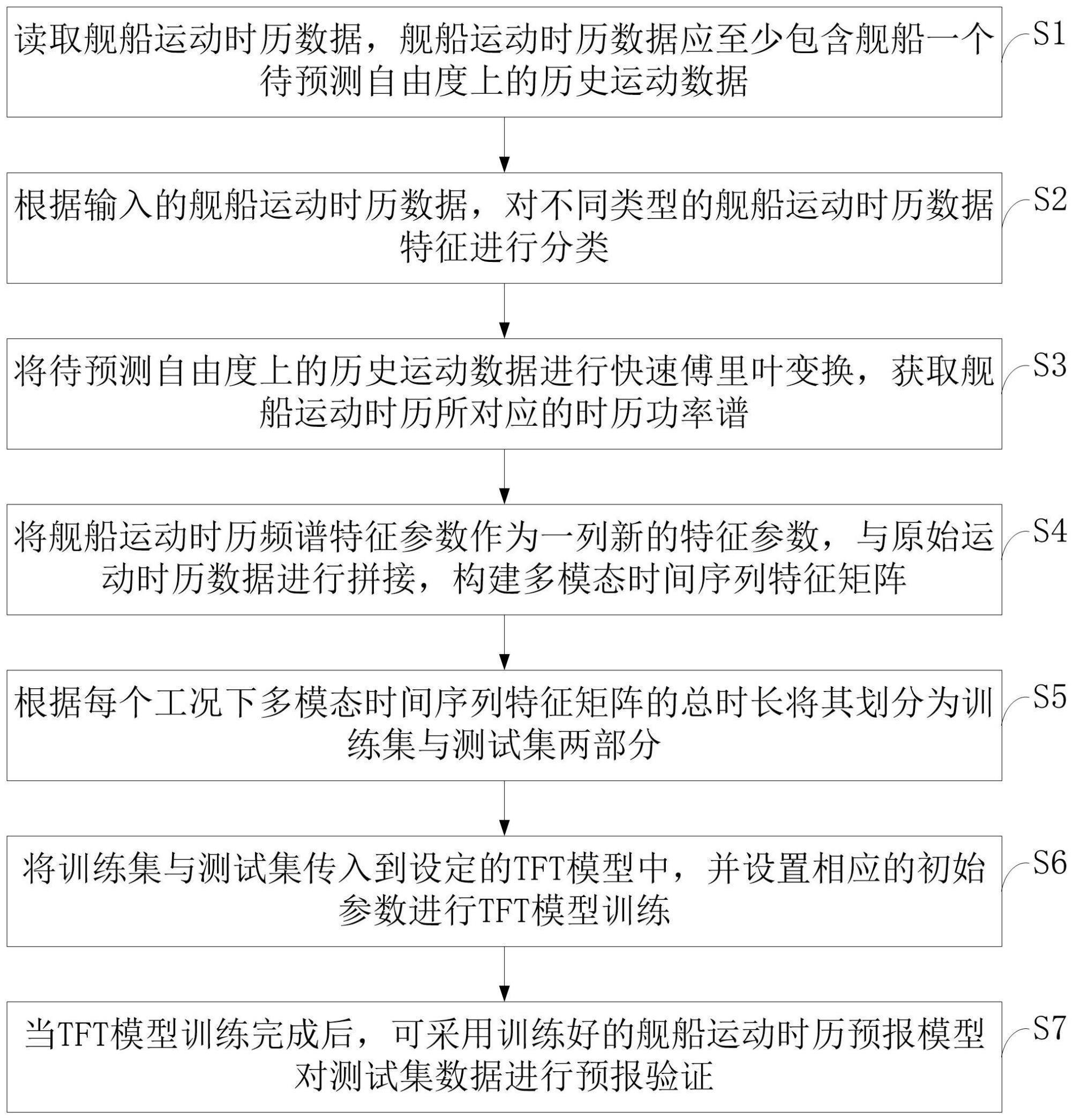
3、s1,读取舰船运动时历数据,舰船运动时历数据包括舰船待预测自由度上的历史运动数据以及风浪流环境数据,当前舰船航速数据、浪向角数据、海况数据;
4、s2,根据输入的舰船运动时历数据,依据数据是否随时间变化,舰船运动时历数据是否连续分为时变连续特征、时不变连续特征与时变离散特征,对不同类型的舰船运动时历数据特征进行分类;时变连续特征包括舰船六自由度运动工况,时不变连续特征包括舰船航速、浪向角工况,时变离散特征包括海况工况;
5、s3,将待预测自由度上的历史运动数据进行快速傅里叶变换,获取舰船运动时历所对应的时历功率谱,依据时历功率谱的零阶矩、二阶矩和四阶矩计算有义值、平均周期和谱宽三个特征参数描述舰船运动时历频谱特征;
6、s4,将舰船运动时历频谱特征参数作为一列新的特征参数,与原始运动时历数据进行拼接,构建多模态时间序列特征矩阵;
7、s5,根据每个工况下多模态时间序列特征矩阵的总时长划分为训练集与测试集;
8、s6,将训练集与测试集传入到设定的tft模型中,并设置相应的初始参数进行tft模型训练,学习输入输出间映射关系,构建舰船运动时历预报模型;
9、s7,当tft模型训练完成后,采用训练好的舰船运动时历预报模型对测试集数据进行预报验证,根据预报结果,输出多通道自注意力模块中不同特征输入和不同时间步输入对模型预报结果影响的重要性占比,获知tft模型各项输入对最终预测结果影响权重的大小。
10、2、根据权利要求1所述的基于tft模型的舰船运动极短期预报方法,其特征在于,在步骤s1中,舰船待预测自由度上的历史运动数据包括:垂荡、横摇、纵摇三自由度运动数据,海况与航速固定为五级海况零航速。
11、在步骤s2中,对不同类型的舰船运动时历数据特征进行分类包括:
12、0°浪向下,第一组组样本垂荡自由度上的数据记作:h1=[h1,h2…h22000],横摇自由度上的数据记作:r1=[r1,r2…r22000],纵摇自由度上的数据记作:p1=[p1,p2…p22000];所述浪向角记作a1;各组样本依次记作:[h1,h2…h19],[r1,r2…r19],[p1,p2…p19],[a1,a2…a19];
13、将[h1,h2…h19],[r1,r2…r19],[p1,p2…p19]标记为时变连续特征,将[a1,a2…a19]标记为时不变连续特征。
14、4、根据权利要求3所述的基于tft模型的舰船运动极短期预报方法,其特征在于,在步骤s3中,将时变连续特征的[h1,h2…h19],[r1,r2…r19],[p1,p2…p19]分别进行快速傅里叶变换,求出每组时历数据对应的功率谱及零阶矩m0、二阶矩m2和四阶矩m4,并计算有义值平均周期和谱宽三个特征参数描述舰船运动时历频谱特征。
15、步骤s3中,有义值与平均周期通过步骤s2中舰船运动时历数据的统计结果获得。
16、在步骤s4中,将舰船运动时历频谱特征的参数标记为时不变连续特征,并与[h1,h2…h19],[r1,r2…r19],[p1,p2…p19],[a1,a2…a19]组合为19组多模态时间序列特征矩阵,第一组样本中,矩阵的每一列依次为:
17、在步骤s5中,训练集与测试集占比为4:1;具体包括:
18、将每组样本的前20000列数据作为训练集,分别记为:
19、后2000列数据为测试集,分别记为:
20、在步骤s6中,设置相应的初始参数进行tft模型训练包括:
21、输入时长lookback、输出时长lookahead;tft模型的输入为过去lookback时长的多模态时历数据,输出为舰船待预测自由度上未来lookahead时长的运动数据。
22、进一步,所述tft模型的输入步长设定为30,输出步长设定为24,将训练集与测试集传入到tft模型中开始训练,训练集中的映射关系为:
23、train1,train2…train30→h31,h31…h54
24、train2,train3…train31→h32,h33…h55
25、…
26、train19947,train19948…train19976→h19977,h19978…h20000。
27、本发明的另一目的在于提供一种基于tft模型的舰船运动极短期预报系统,实施所述基于tft模型的舰船运动极短期预报方法,该系统包括:
28、舰船运动功率谱获取模块,用于基于舰船惯导系统记录的多工况条件下舰船运动数据,通过快速傅里叶变换得到的舰船运动功率谱并提取谱特征参数;
29、舰船运动时历预报模型构建模块,用于将每种工况条件下的舰船航速、浪向角、海浪环境有义波高和特征周期作为时不变特征,将舰船六自由度运动时历、速度、加速度数据和风场信息、谱特征参数作为时变特征;以所述时变特征序列为输入,以待预报的目标舰船自由度运动时历序列为输出,训练tft模型学习输入与输出间的映射关系,构建舰船运动时历预报模型;
30、预报结果获取模块,用于使用舰船运动时历预报模型对未来一段时间的舰船运动时历进行预测,根据预测结果输出不同特征输入和不同时间步输入对模型预报结果影响的重要性占比。
31、结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明提出一种基于时序特征融合的自注意力深度网络(temporal fusion transformers,tft)舰船运动时历预报方法。该方法是一种基于深度学习模型的舰船运动极短期方法,tft模型可在接收在多工况运动时历输入的同时融合相应的时不变特征参数辅助模型进行训练,以便于模型实现针对不同工况开展预报工作时的特征匹配,从而有效模型提升预报性能。
32、本发明基于tft模型对舰船运动时历开展预报,tft模型采用了模块化的设计,可以根据不同的数据集自由组合不同的模块,直接对多维时间序列进行建模。tft模型通过对时序数据进行分解,将时变和时不变的特征分离,分别由lstm-encoder和static-encoder编码,lstm-encoder处理时变的序列信息,static-encoder处理时不变的序列信息。两者的输出通过temporal attention模块融合,然后送入lstm-decoder中预测未来时序。该结构使得对非时间外部静态因素的利用成为可能。另一方面,tft模型引入了多通道的自注意力机制,能够对多维时间序列进行建模并捕捉它们之间的交互关系,并对每个时间步的输入特征进行自适应地选择,使得模型对预测结果的影响更易于解释。
33、作为本发明的积极效果,还体现在以下几个重要方面:本发明转化后将应用于军舰或民用舰之上,可有效提高各类舰船在海上作业时的安全性。本发明有助于打破国外技术封锁,提高国内在舰船运动极短期预报技术方面的自主性与竞争力。本发明实现了对多模态时间序列数据的利用,有效提高了舰船运动极短期预报模型对环境信息的辨识能力。实现了对不同特征输入和不同时间步输入对模型预报结果影响的重要性占比分析,使舰船运动极短期预报模型具备一定的可解释性。
- 还没有人留言评论。精彩留言会获得点赞!