杆件检测方法、装置及电子设备与流程
本公开涉及自动驾驶、智能感知,尤其涉及一种杆件检测方法、装置及电子设备。
背景技术:
1、目前,在自动驾驶系统中,杆件检测算法作为自动驾驶视觉感知辅助定位的关键算法,目标是定位出道路附近的杆件物体,例如,电线杆、灯杆、广告牌杆等,辅助自动驾驶车辆的建图以及定位。实际自动驾驶场景中,由于道路杆件种类的多样性,摄像头采集的图像中一般包含多种杆件。其中,建图以及定位时,通常关注的是多种杆件中高度较高的杆件,即,对高度较高的杆件的检出率要求较高。
2、目前的杆件检测算法中,通过杆件检测模型,获取图像测试集中测试图像中所有尺寸的杆件的检测结果,并基于各个测试图像中所有尺寸的杆件的检测结果,确定一个通用的置信度阈值,基于该置信度阈值,确定摄像头采集的图像的杆件检测结果。其中,测试图像中高度较低的杆件的数量远远多于高度较高的杆件的数量,通用的置信度阈值更偏向于高度较低的杆件的检测,从而导致高度较高的杆件的检出率较差,导致建图以及定位效率差。
技术实现思路
1、本公开提供一种杆件检测方法、装置及电子设备。
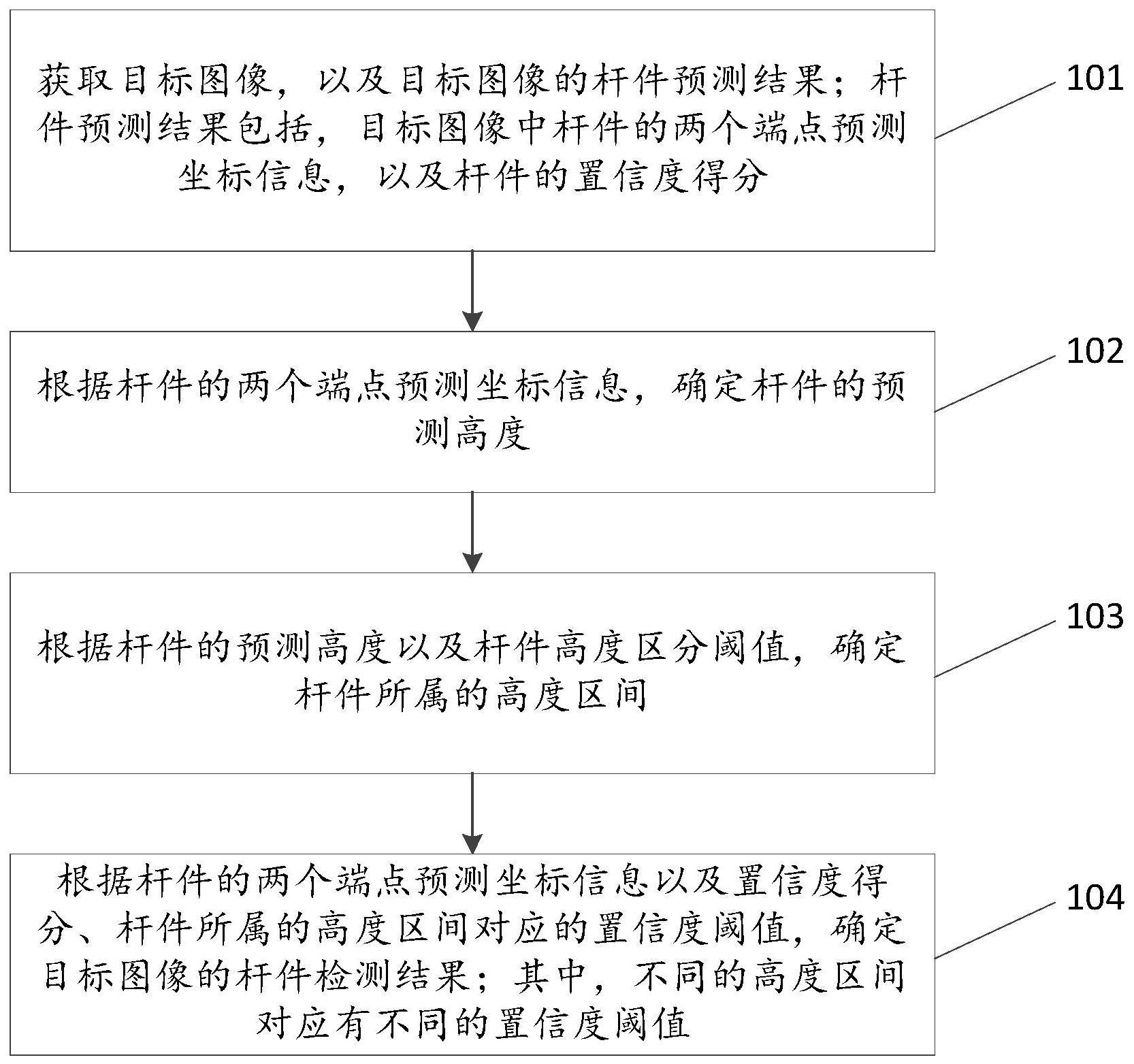
2、根据本公开实施例的第一方面,提供一种杆件检测方法,所述方法包括:获取目标图像,以及所述目标图像的杆件预测结果;所述杆件预测结果包括,所述目标图像中杆件的两个端点预测坐标信息,以及所述杆件的置信度得分;根据所述杆件的两个端点预测坐标信息,确定所述杆件的预测高度;根据所述杆件的预测高度以及杆件高度区分阈值,确定所述杆件所属的高度区间;根据所述杆件的两个端点预测坐标信息以及置信度得分、所述杆件所属的高度区间对应的置信度阈值,确定所述目标图像的杆件检测结果;其中,不同的高度区间对应有不同的置信度阈值。
3、在本公开的一个实施例中,所述杆件高度区分阈值的数量为至少一个;所述杆件高度区分阈值的数量为一个时,所述高度区间的数量为两个,分别为大杆件高度区间和小杆件高度区间;所述大杆件高度区间中的高度大于或者等于所述杆件高度区分阈值;所述小杆件高度区间中的高度小于所述杆件高度区分阈值;所述大杆件高度区间对应的置信度阈值,小于所述小杆件高度区间对应的置信度阈值。
4、在本公开的一个实施例中,所述根据所述杆件的两个端点预测坐标信息以及置信度得分、所述杆件所属的高度区间对应的置信度阈值,确定所述目标图像的杆件检测结果,包括:在所述杆件的置信度得分大于或者等于所述杆件所属的高度区间对应的置信度阈值的情况下,将所述杆件确定为目标杆件;根据所述目标杆件的两个端点预测坐标信息,确定所述目标图像的杆件检测结果。
5、在本公开的一个实施例中,所述方法还包括:获取图像测试集,以及所述图像测试集中测试图像的杆件预测结果;所述图像测试集中包括,多个测试图像,以及所述测试图像的杆件标注结果;所述测试图像的杆件预测结果包括,所述测试图像中预测杆件的两个端点预测坐标信息以及所述预测杆件的置信度得分;所述测试图像的杆件标注结果包括,所述测试图像中标注杆件的两个端点标注坐标信息;根据多个所述标注杆件的两个端点标注坐标信息,确定所述杆件高度区分阈值;根据多个所述标注杆件的两个端点标注坐标信息以及所述杆件高度区分阈值,确定基于所述杆件高度区分阈值划分得到的至少两个高度区间,以及至少两个所述高度区间对应的标注杆件集合;根据多个所述预测杆件的两个端点预测坐标信息,以及多个所述预测杆件的置信度得分,确定至少两个所述高度区间对应的预测杆件集合;针对每个高度区间,根据所述高度区间对应的标注杆件集合以及预测杆件集合,确定所述高度区间对应的置信度阈值。
6、在本公开的一个实施例中,所述根据多个所述标注杆件的两个端点标注坐标信息,确定所述杆件高度区分阈值,包括:根据多个所述标注杆件的两个端点标注坐标信息,确定多个所述标注杆件的标注高度;根据多个所述标注杆件的标注高度,对多个所述标注杆件进行聚类处理,得到至少两个聚类簇;针对每个聚类簇,根据所述聚类簇中标注杆件的标注高度,确定所述聚类簇的标注平均高度;根据至少两个所述聚类簇中相邻两个聚类簇的标注平均高度,确定所述杆件高度区分阈值。
7、在本公开的一个实施例中,所述根据多个所述标注杆件的两个端点标注坐标信息以及所述杆件高度区分阈值,确定基于所述杆件高度区分阈值划分得到的至少两个高度区间,以及至少两个所述高度区间对应的标注杆件集合,包括:基于所述杆件高度区分阈值对高度范围进行划分处理,得到至少两个所述高度区间;针对每个标注杆件,根据所述标注杆件的两个端点标注坐标信息,确定所述标注杆件所属的高度区间;针对每个高度区间,根据属于所述高度区间的标注杆件的两个端点标注坐标信息,确定所述高度区间对应的标注杆件集合。
8、在本公开的一个实施例中,所述根据多个所述预测杆件的两个端点预测坐标信息,以及多个所述预测杆件的置信度得分,确定至少两个所述高度区间对应的预测杆件集合,包括:针对每个预测杆件,根据所述预测杆件的两个端点预测坐标信息,确定所述预测杆件所属的高度区间;针对每个高度区间,根据属于所述高度区间的预测杆件的两个端点预测坐标信息,以及属于所述高度区间的预测杆件的置信度得分,确定所述高度区间对应的预测杆件集合。
9、在本公开的一个实施例中,所述针对每个高度区间,根据所述高度区间对应的标注杆件集合以及预测杆件集合,确定所述高度区间对应的置信度阈值,包括:针对每个高度区间,设置所述高度区间对应的初始置信度阈值;根据所述初始置信度阈值以及所述高度区间对应的预测杆件集合中预测杆件的置信度得分,对所述高度区间对应的预测杆件集合进行过滤处理,得到过滤后的预测杆件集合;获取所述高度区间对应的标注杆件集合中的多个目标标注杆件,以及所述高度区间对应的过滤后的预测杆件集合中的多个目标预测杆件;根据多个所述目标标注杆件的两个端点标注坐标信息,以及多个所述目标预测杆件的两个端点标注坐标信息,对多个所述目标标注杆件以及多个所述目标预测杆件进行配对处理,得到多组配对杆件,以及至少一个未配对目标标注杆件;根据所述配对杆件的组数量、所述未配对标注杆件的数量、所述目标标注杆件的总数量以及所述目标预测杆件的总数量,确定杆件指标;在所述杆件指标不满足杆件指标条件的情况下,对所述初始置信度阈值进行调整处理,直至基于调整处理后的置信度阈值确定得到的杆件指标满足所述杆件指标条件。
10、在本公开的一个实施例中,所述根据所述初始置信度阈值以及所述高度区间对应的预测杆件集合中预测杆件的置信度得分,对所述高度区间对应的预测杆件集合进行过滤处理,得到过滤后的预测杆件集合,包括:依次针对所述高度区间对应的预测杆件集合中的每个预测杆件,在所述预测杆件的置信度得分小于所述初始置信度阈值的情况下,对所述高度区间对应的预测杆件集合中的所述预测杆件进行过滤处理,得到过滤后的预测杆件集合。
11、在本公开的一个实施例中,所述根据多个所述目标标注杆件的两个端点标注坐标信息,以及多个所述目标预测杆件的两个端点标注坐标信息,对多个所述目标标注杆件以及多个所述目标预测杆件进行配对处理,得到多组配对杆件,以及至少一个未配对目标标注杆件,包括:依次针对每个目标标注杆件,根据所述目标标注杆件的两个端点标注坐标信息,以及多个所述目标预测杆件的两个端点标注坐标信息,确定所述目标标注杆件与多个所述目标预测杆件之间的距离;在多个所述距离中的最小距离小于或者等于预设距离阈值的情况下,将所述最小距离对应的目标预测杆件,确定为与所述目标标注杆件配对的目标预测杆件;在多个所述距离中的最小距离大于所述预设距离阈值的情况下,确定所述目标标注杆件,为未配对目标标注杆件。
12、在本公开的一个实施例中,所述杆件指标包括:杆件召回率以及杆件准确率,所述根据所述配对杆件的组数量、所述未配对标注杆件的数量、所述目标标注杆件的总数量以及所述目标预测杆件的总数量,确定杆件指标,包括:将所述组数量与所述目标标注杆件的总数量的比值,确定为所述杆件召回率;确定所述目标预测杆件的总数量与所述组数量的差值;将所述差值与所述目标预测杆件的总数量的比值,确定为所述杆件准确率。
13、在本公开的一个实施例中,所述杆件指标包括:杆件召回率以及杆件准确率;所述杆件指标条件为,所述杆件召回率大于或者等于所述高度区间对应的召回率阈值,且所述杆件准确率大于或者等于所述高度区间对应的准确率阈值。
14、根据本公开实施例的第二方面,还提供一种杆件检测装置,所述装置包括:第一获取模块,用于获取目标图像,以及所述目标图像的杆件预测结果;所述杆件预测结果包括,所述目标图像中杆件的两个端点预测坐标信息,以及所述杆件的置信度得分;第一确定模块,用于根据所述杆件的两个端点预测坐标信息,确定所述杆件的预测高度;第二确定模块,用于根据所述杆件的预测高度以及杆件高度区分阈值,确定所述杆件所属的高度区间;第三确定模块,用于根据所述杆件的两个端点预测坐标信息以及置信度得分、所述杆件所属的高度区间对应的置信度阈值,确定所述目标图像的杆件检测结果;其中,不同的高度区间对应有不同的置信度阈值。
15、根据本公开实施例的第三方面,还提供一种电子设备,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为:实现如上所述的杆件检测方法的步骤。
16、根据本公开实施例的第四方面,还提供一种车辆,包括如上所述的电子设备,或者,所述车辆与如上所述的电子设备连接。
17、根据本公开实施例的第五方面,还提供一种非临时性计算机可读存储介质,当所述存储介质中的指令由处理器执行时,使得处理器能够执行如上所述的杆件检测方法。
18、本公开的实施例提供的技术方案至少带来以下有益效果:
19、通过获取目标图像,以及目标图像的杆件预测结果;杆件预测结果包括,目标图像中杆件的两个端点预测坐标信息,以及杆件的置信度得分;根据杆件的两个端点预测坐标信息,确定杆件的预测高度;根据杆件的预测高度以及杆件高度区分阈值,确定杆件所属的高度区间;根据杆件的两个端点预测坐标信息以及置信度得分、杆件所属的高度区间对应的置信度阈值,确定目标图像的杆件检测结果;其中,不同的高度区间对应有不同的置信度阈值,从而通过不同置信度阈值的设置,使得较高的高度区间对应的置信度阈值,能够偏向于高度较高的杆件的检测,从而能够确保高度较高的杆件的检出率,进而提高建图以及定位效率。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!