一种基于熔断与融合的车道线实例检测方法及系统与流程
本发明涉及智能交通,尤其涉及一种基于熔断与融合的车道线实例检测方法及系统。
背景技术:
1、在道路管理中,常常需要对道路中的车道线进行提取,以获得准确的车道线轮廓,便于进行道路规划。
2、目前主流的车道线实例化检测方法主要包含以下三种:一种是基于聚类算法,一种透视变换拟合方法,一种是神经网络预测法。聚类算法是通过分割算法提取车道线位置信息,将车道位置数据通过聚类算法进行聚类,如聚类算法聚类算法(density-basedspatial clustering of applications with noise,dbscan),dbscan聚类需要设置两个参数ε和minpts,其中参数ε是指领域的距离阈值,某个像素点ε半径范围内区域称之为邻域,minpts是指某一邻域中像素点的数量阈值,某像素点邻域如果至少含有minpts个车道像素点,则称他为核心对象,dbscan聚类的就是通过将核心对象和其邻域内的像素点聚类成一条车道线,而不在范围内的像素点则会被当作噪点;透视变换拟合方法一般用于车载摄像头,首先将前视视角图像通过透视变换到俯视视角图像,场景内的车道线近似平行直线,通过分割算法提取车道线位置信息,然后采用直线拟合得到车道线实例,最后反向透视变换得到原始车道线实例;神经网络预测法通过神经网络在标记好车道线位置及实例编号的数据集上训练,得到可以直接预测车道线的位置及实例编号的网络模型。
3、上述车道线实例检测方法存在如下缺点:(1)聚类方法:当车道线出现交叉或车道线距离很近时,该方法可能出错;(2)透视变换拟合方法:在无约束条件下,将前视视角图像通过透视变换到俯视视角图像非常困难,且场景内的车道线不能近似为平行直线,无法满足透视变换拟合方法的前提条件;(3)神经网络预测法:该类方法通过模型直接预测车道线实例,适合有一定约束条件的场景,如:车载摄像头,约束条件为待检测车道线数量确定,摄像头角度与车辆行驶方向一致,车道线分布在车辆两侧,越靠近图像下方相邻车道线距离越大等,在无约束的监控场景下,且每个实例类别极度不均衡,导致该类方法训练起来难度大。
技术实现思路
1、本发明提供一种基于熔断与融合的车道线实例检测方法及系统,用以解决现有技术中的车道线检测方法也容易出现检测偏差,识别效果差以及受限制条件多的缺陷。
2、第一方面,本发明提供一种基于熔断与融合的车道线实例检测方法,包括:
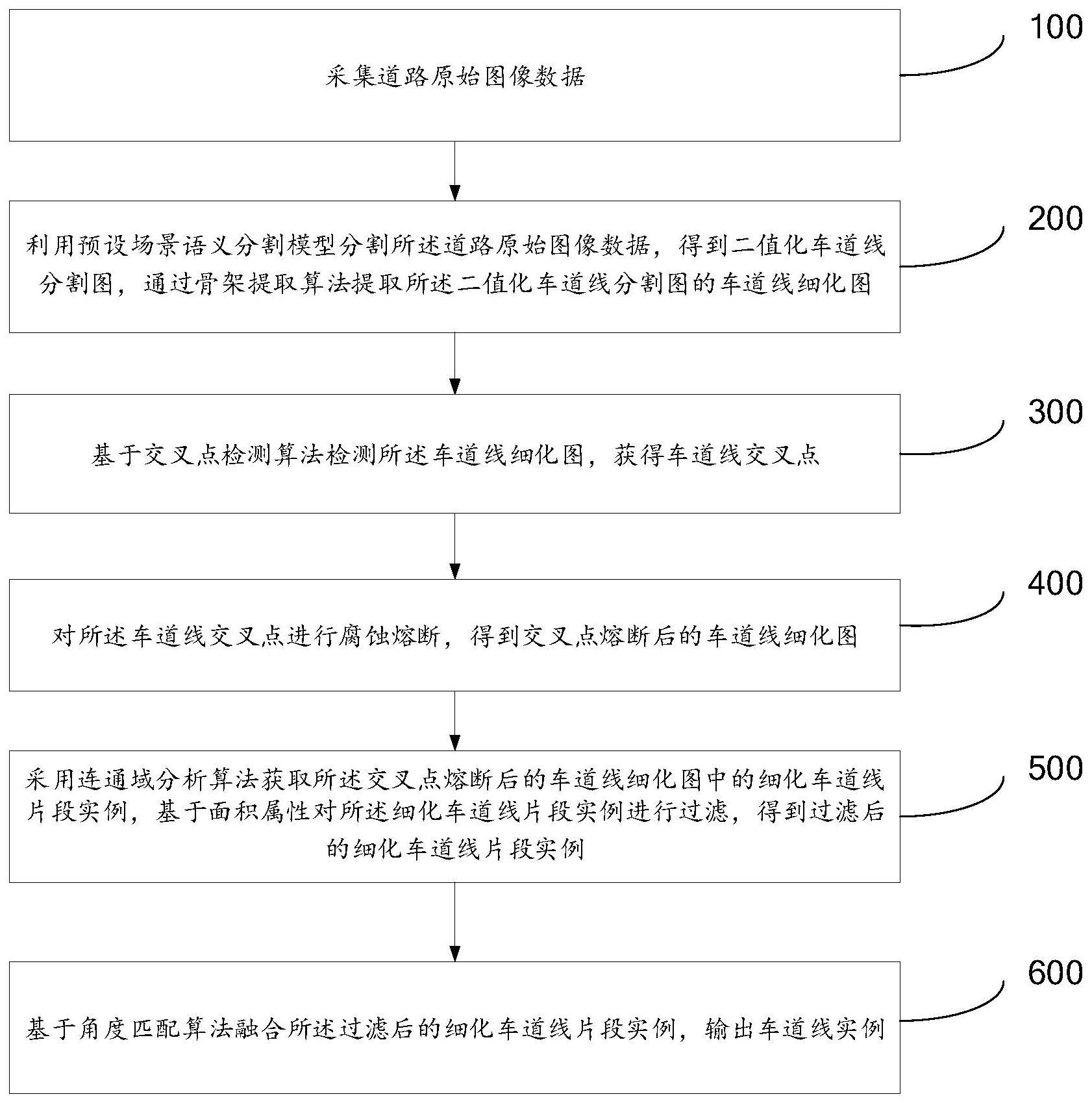
3、采集道路原始图像数据;
4、利用预设场景语义分割模型分割所述道路原始图像数据,得到二值化车道线分割图,通过骨架提取算法提取所述二值化车道线分割图的车道线细化图;
5、基于交叉点检测算法检测所述车道线细化图,获得车道线交叉点;
6、对所述车道线交叉点进行腐蚀熔断,得到交叉点熔断后的车道线细化图;
7、采用连通域分析算法获取所述交叉点熔断后的车道线细化图中的细化车道线片段实例,基于面积属性对所述细化车道线片段实例进行过滤,得到过滤后的细化车道线片段实例;
8、基于角度匹配算法融合所述过滤后的细化车道线片段实例,输出车道线实例。
9、根据本发明提供的一种基于熔断与融合的车道线实例检测方法,利用预设场景语义分割模型分割所述道路原始图像数据,得到二值化车道线分割图,通过骨架提取算法提取所述二值化车道线分割图的车道线细化图,包括:
10、对所述道路原始图像数据中的所有车道线区域进行人工标注,得到车道线真实数据集;
11、采用深度神经网络在所述车道线真实数据集上训练所述预设场景语义分割模型,得到车道线分割模型;
12、将待分割道路图像输入所述车道线分割模型得到所述二值化车道线分割图;
13、利用所述骨架提取算法提取所述二值化车道线分割图的骨架线,由所述骨架线构成所述车道线细化图。
14、根据本发明提供的一种基于熔断与融合的车道线实例检测方法,基于交叉点检测算法检测所述车道线细化图,获得车道线交叉点,包括:
15、确定前景像素点灰度值阈值,在所述车道线细化图中获取大于所述前景像素点灰度值阈值的任一前景像素点;
16、以所述任一前景像素点为中心,确定局部检测区域和第一前景数量阈值;
17、若确定所述任一前景像素点在所述局部检测区域内的前景像素点数量大于等于所述第一前景数量阈值,则所述任一前景像素点为所述车道线交叉点,否则,所述任一前景像素点不为所述车道线交叉点。
18、根据本发明提供的一种基于熔断与融合的车道线实例检测方法,对所述车道线交叉点进行腐蚀熔断,得到交叉点熔断后的车道线细化图,包括:
19、获取所述局部检测区域中的最小前景像素点灰度值;
20、将所述局部检测区域中的所有像素点设为所述最小前景像素点灰度值,得到所述交叉点熔断后的车道线细化图。
21、根据本发明提供的一种基于熔断与融合的车道线实例检测方法,采用连通域分析算法获取所述交叉点熔断后的车道线细化图中的细化车道线片段实例,基于面积属性对所述细化车道线片段实例进行过滤,得到过滤后的细化车道线片段实例,包括:
22、对所述交叉点熔断后的车道线细化图进行轮廓提取,得到多个细化车道线片段实例;
23、获取所述多个细化车道线片段实例的面积属性,确定面积轮廓阈值;
24、过滤小于所述面积轮廓阈值的细化车道线片段实例,得到所述过滤后的细化车道线片段实例。
25、根据本发明提供的一种基于熔断与融合的车道线实例检测方法,基于角度匹配算法融合所述过滤后的细化车道线片段实例,输出车道线实例,包括:
26、确定前景像素点灰度值阈值,在所述过滤后的细化车道线片段实例中获取大于所述前景像素点灰度值阈值的任一前景像素点;
27、以所述任一前景像素点为中心,确定局部检测区域和第二前景数量阈值;
28、若确定所述任一前景像素点在所述局部检测区域内的前景像素点数量大于等于所述第二前景数量阈值,则所述任一前景像素点为车道线端点,否则,所述任一前景像素点不为所述车道线端点;
29、采用均值漂移聚类对所述车道线端点进行聚类,得到车道线端点聚类结果;
30、在所述车道线端点聚类结果中计算多个端点水平夹角,基于所述多个端点水平夹角计算多个角度损失,利用所述多个角度损失中的最小角度损失进行角度匹配,得到任一车道线实例;
31、重复上述融合聚类的步骤,直至所有车道线端点不满足聚类条件,得到全部车道线实例。
32、根据本发明提供的一种基于熔断与融合的车道线实例检测方法,采用均值漂移聚类对所述车道线端点进行聚类,得到车道线端点聚类结果,包括:
33、在所有车道线端点中确定任一中心点,获取与所述任一中心点的欧式距离小于预设距离阈值的车道线端点集合;
34、根据所述车道线端点集合中欧式距离的平均值对所述任一中心点进行更新迭代,直到所述任一中心点的位置无变化为止,输出所述车道线端点聚类结果。
35、根据本发明提供的一种基于熔断与融合的车道线实例检测方法,在所述车道线端点聚类结果中计算多个端点水平夹角,基于所述多个端点水平夹角计算多个角度损失,利用所述多个角度损失中的最小角度损失进行角度匹配,得到任一车道线实例,包括:
36、以任一车道线端点为起点,与所述任一车道线端点在同一车道线上,且距离所述任一车道线端点最近的若干像素点,通过最小二乘法构建直线方程;
37、获取所述任一车道线端点在所述直线方程中的斜率,基于所述斜率的反正切函数得到任一车道线端点水平夹角;
38、由任意两条车道线之间任意两个端点的坐标得到任意两个端点连线水平夹角;
39、基于所述任一车道线端点水平夹角和任意两个端点连线水平夹角,得到任意两条车道线之间的任意两个端点角度损失;
40、若确定所述车道线端点聚类结果中的任意两个端点角度损失的最小值小于预设角度阈值,则所述任意两个端点角度损失的最小值对应的任一车道线实例匹配成功,否则匹配失败。
41、第二方面,本发明还提供一种基于熔断与融合的车道线实例检测系统,包括:
42、采集模块,用于采集道路原始图像数据;
43、分割模块,用于利用预设场景语义分割模型分割所述道路原始图像数据,得到二值化车道线分割图,通过骨架提取算法提取所述二值化车道线分割图的车道线细化图;
44、检测模块,用于基于交叉点检测算法检测所述车道线细化图,获得车道线交叉点;
45、熔断模块,用于对所述车道线交叉点进行腐蚀熔断,得到交叉点熔断后的车道线细化图;
46、过滤模块,用于采用连通域分析算法获取所述交叉点熔断后的车道线细化图中的细化车道线片段实例,基于面积属性对所述细化车道线片段实例进行过滤,得到过滤后的细化车道线片段实例;
47、融合模块,用于基于角度匹配算法融合所述过滤后的细化车道线片段实例,输出车道线实例。
48、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述基于熔断与融合的车道线实例检测方法。
49、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述基于熔断与融合的车道线实例检测方法。
50、本发明提供的基于熔断与融合的车道线实例检测方法及系统,通过交叉点熔断的方式解决车道线交叉导致车道线实例混乱的问题,采用角度匹配方式将拆分后的车道线片段融合,达到复杂场景下车道线实例检测目的。
- 还没有人留言评论。精彩留言会获得点赞!