基于图像数据的楼宇火灾环境检测方法与流程
本技术涉及楼宇火灾检测,具体涉及基于图像数据的楼宇火灾环境检测方法。
背景技术:
1、随着经济的发展和社会生产力的增强使得城市基础建设水平逐渐提高,城市化进程不断加快,在越来越多的城市,楼宇建筑持续崛起的同时,各类火灾安全隐患日益增多,导致城市建筑空间发生火灾的几率增加,影响到建筑财产安全与居民的生命安全。楼宇环境往往是相对密闭的,火灾蔓延发展较为迅速,造成危害较大,故及时发现火灾并做出相应处理可以有效保障居民的生命与财产安全。
2、消防火灾识别监控系统基于智能视频分析,实现对监控区域内的烟雾和火焰进行识别。并且能动态识别烟雾从有到无、火焰从小到大的过程,并根据识别情况实时分析报警。目前火焰识别方法主要有基于人工设计的图像特征和基于卷积神经网络提取的图像的深度特征。但由于楼宇建筑内部环境较为复杂,在使用图像处理技术对火灾进行智能检测时,采集的图像往往会受到光线、噪声、模糊等因素的影响,导致图像质量较差,难以清晰地展示出楼宇环境内的火灾状况,直接使用采集的图像进行火灾智能检测时,其效率与精度均较差。
技术实现思路
1、本技术实施例提供一种基于图像数据的楼宇火灾环境检测方法,能够对采集的图像进行质量提高,进而提高楼宇环境火灾检测的精度和效率。
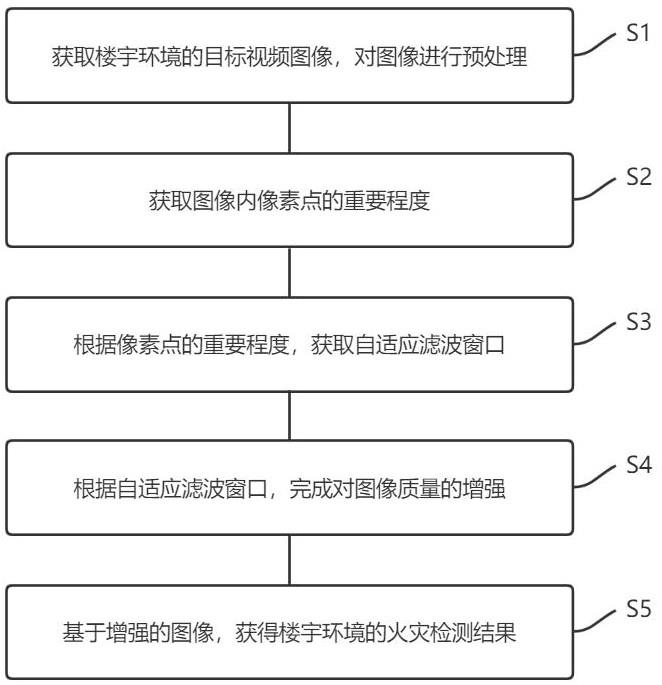
2、本技术实施例提供一种基于图像数据的楼宇火灾环境检测方法,所述方法包括:
3、获取楼宇环境的目标视频图像,对图像进行预处理;
4、获取图像内像素点的重要程度;
5、根据像素点的重要程度,获取自适应滤波窗口;
6、根据自适应滤波窗口,完成对图像质量的增强;
7、基于增强的图像,获得楼宇环境的火灾检测结果。
8、在本技术的部分实施例中,所述获取楼宇环境的目标视频图像,对图像进行预处理的步骤,包括:通过监控摄像头采集楼宇环境的目标视频图像,采集的图像为rgb图像,再对所述rgb图像进行灰度化处理,得到楼宇环境的目标视频灰度图像。
9、在本技术的部分实施例中,所述获取图像内像素点的重要程度的步骤,包括:
10、获取若干目标视频图像,所述目标视频图像为时序上连续的图像;
11、获取第一时刻的第一目标视频图像的第一感兴趣区域和第二时刻的第二目标视频图像的第二感兴趣区域,所述第二时刻在时序上为所述第一时刻的相邻的下一时刻,所述第一感兴趣区域和所述第二感兴趣区域均为火焰区域;
12、对所述第一感兴趣区域和所述第二感兴趣区域进行匹配,以匹配出所述第一感兴趣区域和所述第二感兴趣区域之间相关联的感兴趣程度;
13、基于火灾的特性,对所述感兴趣程度进行误差优化处理,得到优化后的感兴趣程度;
14、根据优化后的感兴趣程度,对感兴趣区域内的像素点进行局部特征分析,获取各像素点的重要程度。
15、在本技术的部分实施例中,所述获取第一时刻的第一目标视频图像的第一感兴趣区域和第二时刻的第二目标视频图像的第二感兴趣区域的步骤包括:
16、利用大津阈值分割算法分别对所述第一目标视频图像和所述第二目标视频图像进行计算分割,得到第一感兴趣区域和第二感兴趣区域,所述第一感兴趣区域和所述第二感兴趣区域均具有多个,且所述第一感兴趣区域的数量与所述第二感兴趣区域的数量相同。
17、在本技术的部分实施例中,所述对所述第一感兴趣区域和所述第二感兴趣区域进行匹配,以匹配出所述第一感兴趣区域和所述第二感兴趣区域之间相关联的感兴趣程度的步骤,包括:
18、获取多个所述第一感兴趣区域内的多个第一中心点和获取多个所述第二感兴趣区域内的多个第二中心点;
19、计算多个所述第一中心点分别与多个所述第二中心点之间的欧式距离,匹配出最小的欧式距离,根据最小的欧式距离得到第一感兴趣区域中的第一匹配区域和第二感兴趣区域中的第二匹配区域,所述第一匹配区域和所述第二匹配区域为两个相邻时刻的同一区域;
20、基于火焰区域和其他干扰因素的特性,通过比较所述第一匹配区域和所述第二匹配区域之间的变化,得到火焰区域的感兴趣程度。
21、在本技术的部分实施例中,所述基于火焰区域和其他干扰因素的特性,通过比较所述第一匹配区域和所述第二匹配区域之间的变化,得到火焰区域的感兴趣程度的步骤,包括:
22、将所述第一匹配区域投影到所述第二目标视频图像上,得到第一投影区域,所述第一投影区域与所述第二匹配区域至少部分重叠,以形成重叠区域;
23、获取第二匹配区域中未与所述第一投影区域重叠的未重叠区域;
24、根据所述重叠区域和所述未重叠区域,计算出感兴趣程度;
25、具体公式为:
26、;
27、
28、其中,,,分别为第一匹配区域a,第二匹配区域b,重叠区域c的面积。表示从区域的面积上反映了重叠区域c的重叠程度;为重叠区域c区域内第i个像素点在第一匹配区域a内所对应的像素点灰度值;为重叠区域c区域内第i个像素点在第二匹配区域b内所对应的像素点灰度值;为重叠区域内像素点的个数;cd为重叠区域c的重叠程度。
29、在本技术的部分实施例中,所述基于火灾的特性,对所述感兴趣程度进行误差优化处理,得到优化后的感兴趣程度的步骤,包括:
30、获取所述第一匹配区域中灰度值最大的像素点,记为z点;
31、获取所述第一匹配区域上的多个采样点,所述多个采样点位于所述第一匹配区域的边缘上并沿所述边缘等间距排列;
32、所述多个采样点分别与所述z点连接,得到多条采样线段;
33、获取多条采样线段与水平线的顺时针夹角,根据计算公式得到优化后的感兴趣程度;
34、具体公式为:
35、;
36、;
37、;
38、;
39、其中,采样点记作m点,所述采样线段记作表示了采样线段上从z点到m点之间的第i个像素点的灰度值,则表示了第i+1个像素点的灰度值;表示了采样线段上像素点个数;值反映了采样线段上灰度衰减累加值;为采样线段所对应的角度,则为风速方向,其差异k反映了采样线段是否位于风速方向上;则反映了不同采样线段之间的差异,其中n为采样线段的个数,为线段所对应的角度差异;表示了第i条采样线段所对应的角度差异;表示了第i条采样线段所对应的长度,表示线段所对应的长度;与分别表示了第i条线段的差异特征值与灰度衰减特征值,表示初步roi区域的感兴趣程度,表示优化后的感兴趣程度,k表示采样线段角度与风向方向之间的差异。
40、在本技术的部分实施例中,所述火灾的特性包括火灾的蔓延特性和产生具有蔓延特性的烟雾的特性。
41、在本技术的部分实施例中,所述根据优化后的感兴趣程度,对感兴趣区域内的像素点进行局部特征分析,获取各像素点的重要程度的步骤,包括:
42、对感兴趣区域内的像素点进行局部特征分析,所述像素点的局部特征包括像素点的感兴趣程度,像素点的灰度方差以及像素点与感兴趣区域内灰度值最大的像素点之间的距离;
43、根据公式分别计算出各像素点的重要程度;
44、其中,这里以像素点s举例,具体公式为:
45、;
46、为像素点s所在感兴趣区域的感兴趣程度;为s点的灰度方差;则为像素点s与感兴趣区域内灰度值最大的像素点z点的距离;u为像素点s的重要程度。
47、在本技术的部分实施例中,所述根据像素点的重要程度,获取自适应滤波窗口的步骤,包括:
48、获取感兴趣区域内的像素点的重要程度;
49、对感兴趣区域内的像素点的重要程度进行归一化处理;
50、设定感兴趣区域外的像素点的重要程度为感兴趣区域内的像素点的重要程度的最小值;
51、根据公式计算得到自适应滤波窗口;
52、公式为:
53、;
54、其中,为自适应滤波窗口的尺寸;ck为初始滤波窗口;u为像素点所对应的重要程度,f[]为自适应滤波窗口的横向和纵向尺寸。
55、由此可知,本技术实施例主要是通过获取楼宇环境的视频图像,对该图像进行预处理,这里的预处理主要是对图像进行灰度化处理;再获取经过预处理后的图像内的像素点的重要程度,这里的重要程度根据需要检测的指标进行设定,在本实施例中,主要是针对火灾检测,则像素点的重要程度主要是指对火灾图像的重要程度;再根据像素点的重要程度,获取自适应滤波窗口,实现滤波窗口的自适应调节,有效避免人工根据经验调节所带来的误差等问题;继而再通过自适应滤波窗口实现图像质量的增强,基于增强后的图像,获取楼宇环境的火灾检测结果,相较于现有技术中图像质量较差导致火灾检测结果容易出现不准确的情况而言,本技术提高了图像质量,从而提高火灾检测的效率和精度。
- 还没有人留言评论。精彩留言会获得点赞!