一种吊架吊杆倾角识别方法、装置、设备及存储介质与流程
本发明涉及管道支吊架,特别涉及一种吊架吊杆倾角识别方法、装置、设备及存储介质。
背景技术:
1、支吊架是火力发电厂高温高压管道的重要承载部件,对管道的安全运行具有重要的作用,支吊架的吊杆倾角大小直接影响支吊架输出载荷在竖直方向与水平方向上的分量大小,其中支吊架输出载荷的竖直向分量用于管道设计承载、水平向分量则会给管道带来不利的附加载荷,由于热力管道的热膨胀特性,支吊架吊杆不可避免的会存在一定的倾斜情况,但相关标准(如dl/t616-2006)对吊架吊杆的偏斜角度范围也有明确的规定,一般要求恒力吊架、变力弹簧吊架的吊杆偏斜角度不超过4°,刚性吊架的吊杆偏斜角度不超过3°。
2、在电厂外检及安评检查中,吊杆偏斜是一项重要的检查项目,由于现场管道吊架基本都处于悬空的位置,检查人员无法对吊杆倾角进行直接测量,加上现场吊架数量较多,如果每个吊架搭设脚手架进行测量,则时间成本、经济成本均较高,目前也只能采用目视的方法进行估测,精度很差,加之吊杆倾斜是一个在三维空间内的任意向倾斜问题,不同的人站在不同的方位角度观察的结果也不一样,因而在现场评判过程中也容易引起争议。现有技术中,公开了一种利用激光测距方法开展远距离吊架倾角观测的方法,不过该方法在现场检查时需要携带激光测距仪,且对距离测量精度有一定的要求,现场操作起来还不够便捷。因此,如何更便捷的得到吊杆的倾斜角度是急需解决的。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种吊架吊杆倾角识别方法、装置、设备及存储介质,能够远距离非接触式完成对吊架的吊杆三维倾角的测量。其具体方案如下:
2、第一方面,本技术公开了一种吊架吊杆倾角识别方法,包括:
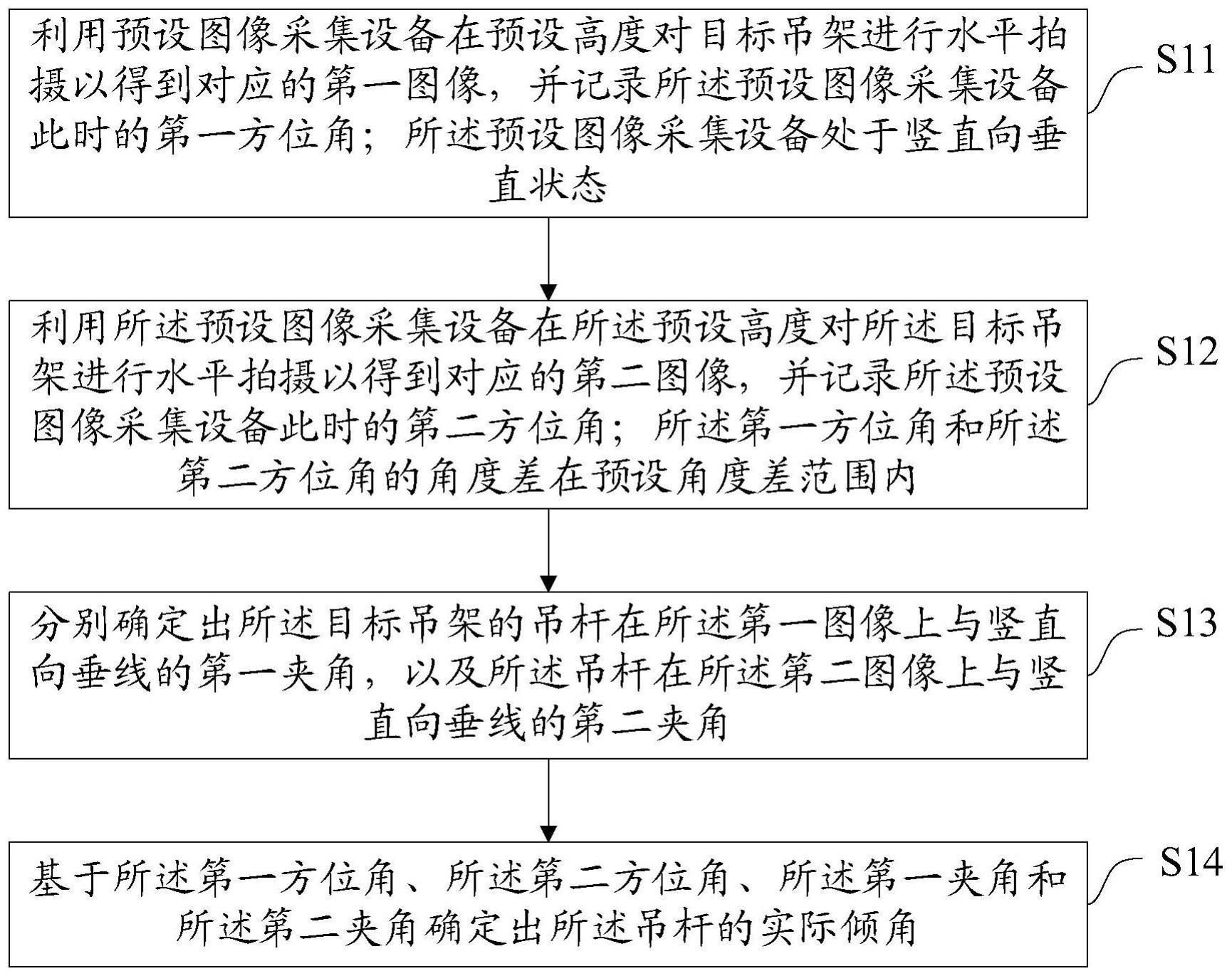
3、利用预设图像采集设备在预设高度对目标吊架进行水平拍摄以得到对应的第一图像,并记录所述预设图像采集设备此时的第一方位角;所述预设图像采集设备处于竖直向垂直状态;
4、利用所述预设图像采集设备在所述预设高度对所述目标吊架进行水平拍摄以得到对应的第二图像,并记录所述预设图像采集设备此时的第二方位角;所述第一方位角和所述第二方位角的角度差在预设角度差范围内;
5、分别确定出所述目标吊架的吊杆在所述第一图像上与竖直向垂线的第一夹角,以及所述吊杆在所述第二图像上与竖直向垂线的第二夹角;
6、基于所述第一方位角、所述第二方位角、所述第一夹角和所述第二夹角确定出所述吊杆的实际倾角。
7、可选的,所述基于所述第一方位角、所述第二方位角、所述第一夹角和所述第二夹角确定出所述吊杆的实际倾角,包括:
8、计算所述第一方位角和所述第二方位角之间的角度差以得到方位夹角;
9、通过预设实际倾角计算公式并结合所述方位夹角、所述第一夹角和所述第二夹角计算出所述吊杆的实际倾角。
10、可选的,所述预设实际倾角计算公式为
11、
12、其中,α为所述第一夹角;β为所述第二夹角;为所述方位夹角;θ为所述实际倾角。
13、可选的,所述分别确定出所述目标吊架的吊杆在所述第一图像上与竖直向垂线的第一夹角,以及所述吊杆在所述第二图像上与竖直向垂线的第二夹角,包括:
14、通过预设测角工具对所述第一图像上的所述目标吊架的吊杆与对应的竖直向垂线之间的夹角进行测量以得到第一夹角;
15、通过所述预设测角工具对所述第二图像上的所述目标吊架的吊杆与对应的竖直向垂线之间的夹角进行测量以得到第二夹角。
16、可选的,所述利用预设图像采集设备在预设高度对目标吊架进行水平拍摄以得到对应的第一图像,并记录所述预设图像采集设备此时的第一方位角,包括:
17、通过预设无人机图像采集设备在预设高度对目标吊架进行水平拍摄以得到对应的第一图像,并通过所述预设无人机图像采集设备的定位装置确定出所述预设图像采集设备此时的第一方位角;
18、相应的,所述利用所述预设图像采集设备在所述预设高度对所述目标吊架进行水平拍摄以得到对应的第二图像,并记录所述预设图像采集设备此时的第二方位角,包括:
19、通过所述预设无人机图像采集设备在预设高度对目标吊架进行水平拍摄以得到对应的第二图像,并通过所述定位装置确定出所述预设图像采集设备此时的第二方位角。
20、可选的,所述基于所述第一方位角、所述第二方位角、所述第一夹角和所述第二夹角确定出所述吊杆的实际倾角之后,还包括:
21、收集多组实际倾角进行数据拟合处理,以得到最终实际倾角。
22、第二方面,本技术公开了一种吊架吊杆倾角识别装置,包括:
23、第一图像获取模块,用于利用预设图像采集设备在预设高度对目标吊架进行水平拍摄以得到对应的第一图像,并记录所述预设图像采集设备此时的第一方位角;所述预设图像采集设备处于竖直向垂直状态;
24、第二图像获取模块,用于利用所述预设图像采集设备在所述预设高度对所述目标吊架进行水平拍摄以得到对应的第二图像,并记录所述预设图像采集设备此时的第二方位角;所述第一方位角和所述第二方位角的角度差在预设角度差范围内;
25、夹角确定模块,用于分别确定出所述目标吊架的吊杆在所述第一图像上与竖直向垂线的第一夹角,以及所述吊杆在所述第二图像上与竖直向垂线的第二夹角;
26、实际倾角获取模块,用于基于所述第一方位角、所述第二方位角、所述第一夹角和所述第二夹角确定出所述吊杆的实际倾角。
27、所选的,所述实际倾角获取模块,包括:
28、方位夹角确认单元,用于计算所述第一方位角和所述第二方位角之间的角度差以得到方位夹角;
29、实际倾角计算单元,用于通过预设实际倾角计算公式并结合所述方位夹角、所述第一夹角和所述第二夹角计算出所述吊杆的实际倾角。
30、第三方面,本技术公开了一种电子设备,包括:
31、存储器,用于保存计算机程序;
32、处理器,用于执行所述计算机程序以实现前述的吊架吊杆倾角识别方法。
33、第四方面,本技术公开了一种计算机可读存储介质,用于保存计算机程序,所述计算机程序被处理器执行时实现前述的吊架吊杆倾角识别方法。
34、可见,本技术中,利用预设图像采集设备在预设高度对目标吊架进行水平拍摄以得到对应的第一图像,并记录所述预设图像采集设备此时的第一方位角;所述预设图像采集设备处于竖直向垂直状态;利用所述预设图像采集设备在所述预设高度对所述目标吊架进行水平拍摄以得到对应的第二图像,并记录所述预设图像采集设备此时的第二方位角;所述第一方位角和所述第二方位角的角度差在预设角度差范围内;分别确定出所述目标吊架的吊杆在所述第一图像上与竖直向垂线的第一夹角,以及所述吊杆在所述第二图像上与竖直向垂线的第二夹角;基于所述第一方位角、所述第二方位角、所述第一夹角和所述第二夹角确定出所述吊杆的实际倾角。这样一来,通过预设图像采集设备在两个方位分别采集目标吊架的图像,然后利用两张图像上的吊杆平面倾角测量数据,及两次拍摄的水平方位角夹角,即可计算得到待测吊杆准确的三维倾斜角度。这样一来,可以非接触式获取操作精度要求不高的远距离吊架的三维倾斜角度,操作简单,极大的节省了人力操作成本。
- 还没有人留言评论。精彩留言会获得点赞!