超磁致伸缩换能器电磁-机耦合参数辨识方法及系统
本发明涉及一种超磁致伸缩换能器电磁-机耦合参数辨识,具体涉及一种基于布谷鸟和人工鱼群算法的超磁致伸缩换能器电磁-机耦合参数辨识。
背景技术:
1、超磁致伸缩换能器是以超磁致伸缩棒材(gmm)为核心的换能装备,超磁致伸缩棒材会在交变的激励下产生磁致伸缩应变,为了让材料产生更大的应变进而产生更多的能量,则需要对超磁致伸缩材料的性能进行研究。一些学者提出超磁致伸缩棒材的磁致伸缩应变ε与饱和磁化强度、饱和磁致伸缩率的及材料磁化强度的关系,说明材料ε与磁化强度有很大关联,为了描述磁化过程,现有的磁化理论建模研究主要有数学模型preisach模型和物理模型j-a模型,j-a模型相比于preisach模型公式相对简单,物理参数简单明确,在磁性材料的建模中有广泛应用,有些研究在此基础上引入换能器机械机构,将换能器材料层面与换能器系统整体层面联系起来,建立换能器整体模型描述输出位移特性。换能器输入输出特性具有十分复杂的非线性关系,要准确预测换能器工作特性需要对模型中的关键参数进行精确设置,但是模型中的关键参数较多,j-a部分参数具有强耦合性,材料部分参数的不一致性且机械部分参数与输出位移直接相关,所以根据经验来调参具有很大困难性,现有研究多引入人工智能算法来辨识模型参数,且较多使用单一人工智能算法,如粒子群算法pso、退火算法sa、布谷鸟算法cs等算法,这些算法流程简单,执行效率高,但是很容易过早收敛,陷入局部最优,不适用于多维参数耦合的换能器磁-机参数辨识。
技术实现思路
1、本发明所要解决的技术问题是,针对现有技术不足,提供一种超磁致伸缩换能器电磁-机耦合参数辨识方法及系统,实现电磁-机耦合模型参数的快速和准确辨识。
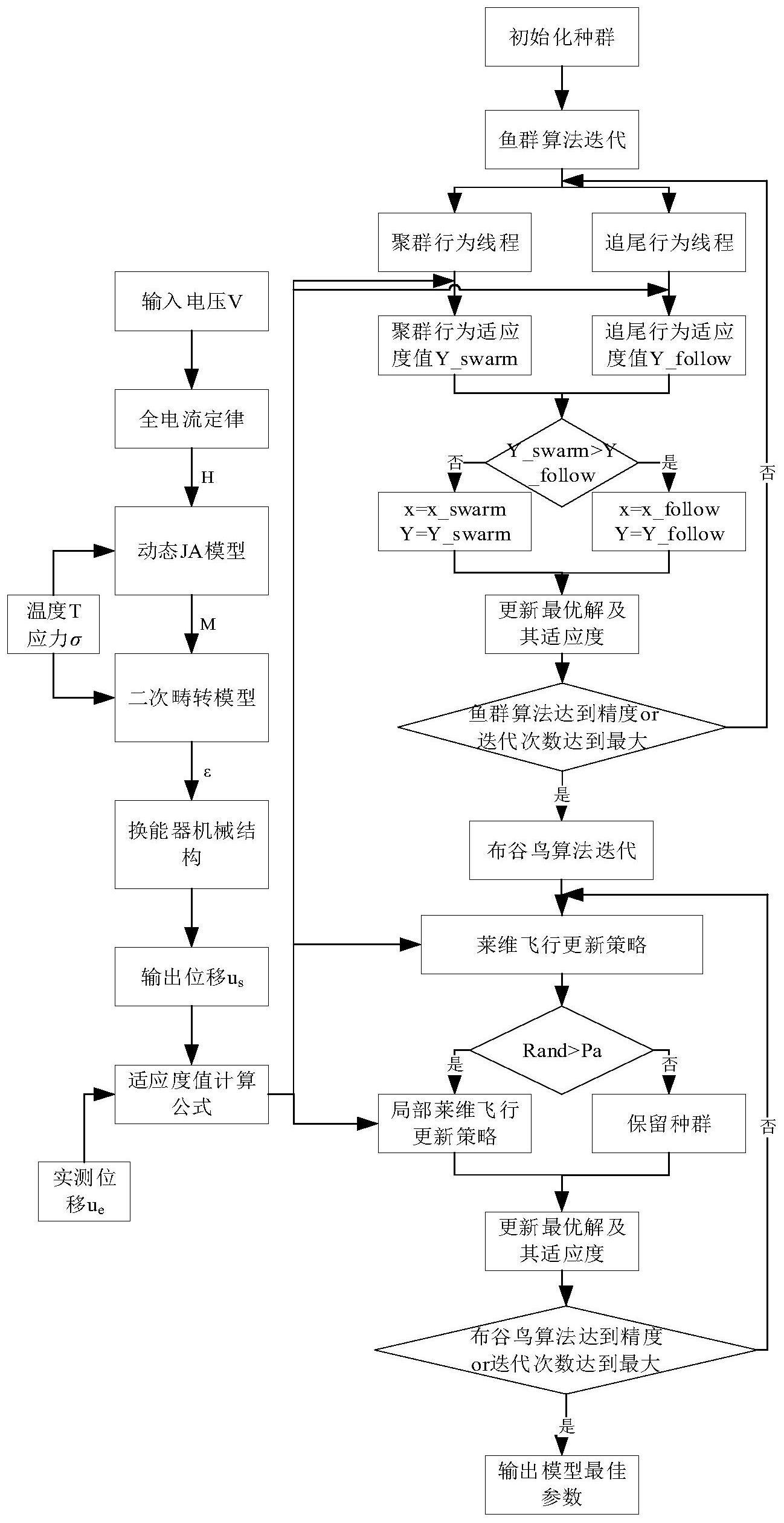
2、为解决上述技术问题,本发明所采用的技术方案是:一种超磁致伸缩换能器电磁-机耦合参数辨识方法,包括以下步骤:
3、s1、建立超磁致伸缩换能器的电磁-机耦合模型,以电磁-机耦合模型中的参数[ms,a,k,α,c,λs,e,mm,cm,km]为待优化辨识参数;其中,ms代表饱和磁化强度,a为形状系数,k代表钉扎系数,α代表平均场耦合系数,c代表可逆系数,λs代表gmm棒材的饱和磁致伸缩,e代表gmm棒材的杨氏模量,mm、cm和km分别代表换能器总体等效质量、等效阻尼和等效刚度;
4、s2、设置种群内个体数量n,种群中个体的维度d,种群个体即模型解xi=[ms,a,k,α,c,λs,e,mm,cm,km];
5、s3、设定参数最优解范围[xmin,xmax],在迭代更新过程中若参数大于xmax,则限制参数等于xmax,若参数小于xmin,则限制参数等于xmin;
6、s4、初始化种群,将初始化的种群个体代入电磁-机耦合模型,得出换能器位移的计算值u,获取种群中适应度值最小的个体位置作为全局最优解,该最小适应度值作为全局最佳适应度值;所述适应度值设定为超磁致伸缩换能器实际输出位移与换能器位移的计算值的均方差;
7、s5、设定每一条人工鱼的位置对应电磁-机耦合模型的一组参数解,更新人工鱼聚群行为后的位置和执行追尾行为后的位置,将聚群行为后的位置和执行追尾行为后的位置分别代入电磁-机耦合模型,得出换能器位移的两个计算值,利用该两个计算值分别得到两个适应度值,将较小适应度值对应的参数解赋值给第t+1次迭代第i条人工鱼的位置,对比第t+1次迭代第i条人工鱼的位置对应的适应度值与所述全局最佳适应度值,选择适应度值低的人工鱼的位置作为更新后的全局最佳适应度和全局最优解;
8、s6、判断鱼群算法是否结束,若是,则将鱼群算法的最终种群作为布谷鸟算法的初始鸟巢群落,将鱼群算法的全局最优解作为布谷鸟算法的初始全局最优解,更新鸟巢群落,将初始鸟巢群落和更新后的鸟巢群落中适应度值较小的鸟巢赋值给初始鸟巢群落,得到第一鸟巢群落;
9、s7、以设定的发现概率对第一鸟巢群落进行随机莱维局部游走移动,从所述第一鸟巢群落中选出两个鸟巢,利用选择的两个鸟巢的位置更新第一鸟巢群落;
10、s8、选择第一鸟巢群落和更新后的第一鸟巢群落中适应度值较低的鸟巢群落,将选择的鸟巢群落赋给第一鸟巢群落,得到第二鸟巢群落,将第二鸟巢群落作为下一次迭代的初始鸟巢群落;
11、s9、获取第二鸟巢群落对应的最佳适应度及其鸟巢位置,对比该最佳适应度与布谷鸟算法的全局最优解对应的适应度,选择适应度低的鸟巢,更新全局最佳适应度和全局最优解;
12、s10、判断布谷鸟算法是否结束,若是,则输出最优解,即得到辨识后的参数。
13、本发明引入人工鱼群和布谷鸟算法的混合算法对换能器磁机耦合参数进行提取,该混合算法先利用人工鱼群算法对最优解区域进行缩小,满足精度条件后再切换改进布谷鸟算法对最优解进行精细化搜索,使得搜索过程中不易陷入局部最优区域,且能多次跳出当前最优解往更高精度解方向靠近,所以可以对多维度、强耦合换能器模型参数进行快速准确寻优。本发明将外加应力、温度、涡流效应和异常损耗考虑进j-a模型,并作为计算棒材磁化强度的模型,进而通过改进的二次畴转模型得出棒材的应变特性。单考虑材料层面无法对换能器整体构架进行描述,本发明将材料层面与换能器机械部分联系起来,构建基于j-a磁化模型与材料层次和换能器机械层次耦合的整体等效电路模型的磁-机耦合模型,对换能器整体构架进行准确描述。
14、步骤s1中,电磁-机耦合模型的表达式为:
15、hl=nic;
16、
17、
18、
19、其中,h为棒材内部的磁场强度,l为gmm棒材长度,n为绕制的线圈匝数,ic为由输入电压v施加在线圈电阻上产生的输入电流,d代表gmm棒材的直径,sc代表gmm棒材的横截面积,ρ代表gmm棒材的电阻率,β为gmm棒材的几何因子,g0是无量纲常数,h0是与gmm棒材磁畴壁相关的参数,ms代表饱和磁化强度,he=h+qm,μ0代表真空磁导率,γ11、γ12、γ13、γ21、γ22、γ23表示gmm棒材的磁致伸缩系数,δt=t-tr,tr代表自旋再取向温度,t为环境温度,m为磁化强度,he为有效磁场强度,ms代表饱和磁化强度,δ=sign(dh/dt),c代表可逆系数,f代表gmm棒材产生应变时的输出力,σ0代表外加预应力,u代表gmm棒材振动带动换能器输出的位移,和代表u的二阶导数和一阶导数,cm分代表换能器等效阻尼,εt=αt(t-tr),λs为gmm棒材饱和磁致伸缩系数,es为棒材的弹性模量,σs为饱和磁化强度下的饱和应力,αt为热膨胀系数。
20、本发明的模型中包含了磁路模型、j-a模型、二次畴转模型和机械模型,各部分模型都有一些参数对换能器最终的输出有很大影响,并且参数间有很强的耦合关系,对这些参数的有效辨识可以使得模型更加准确描述换能器实际输出特性。
21、步骤s5中,聚群行为后的位置xswarmt+1和执行追尾行为后的位置xfollowt+1的具体获取过程包括:
22、1)利用下式更新第t+1次迭代第i条人工鱼聚群行为后的位置xswarmt+1:
23、其中,rand为0-1之间的随机数,step为人工鱼移动步长,||xc-xit||2为两个位置相减后的二范数,表示中心位置xc与第i条人工鱼位置xit的距离;
24、2)设置一个标志位flag_swarm,判断是否执行了聚群行为的更新策略,若已执行,则令flag_swarm=1,进入步骤3);若未执行,则令flag_swarm=0,执行觅食行为,即若觅食行为使得鱼群移动,则将xnestt+1赋给xswarmt+1,进入步骤3);若觅食行为未使得鱼群移动,则进入随机行为,即将xrt+1赋给xswarmt+1,进入步骤3);
25、3)利用下式更新第t+1次迭代第i条人工鱼执行追尾行为后的位置xfollowt+1:
26、xpbest为第i条人工鱼视野内局部最优位置;
27、4)设置一个标志位flag_follow,判断是否执行了追尾行为的更新策略,若已执行,则令flag_follow=1;若未执行,则令flag_follow=0,并执行觅食行为
28、若觅食行为使得鱼群移动,则将xnestt+1赋给xfollowt+1;若觅食行为并未使得鱼群移动,则进入随机行为并将xrt+1赋给xfollowt+1。
29、步骤s6中,第一鸟巢群落的具体获取过程包括:
30、利用下式更新第t+1次迭代第i1个鸟巢的位置得到更新后的初始鸟巢群落:levy_step是服从莱维分布的随机步长,α’为步长缩放因子,α0代表初始步长缩放因子,t代表当前迭代次数,tmax代表布谷鸟算法最大迭代次数;
31、将初始鸟巢群落和更新后的鸟巢群落中适应度值较小的鸟巢赋值给初始鸟巢群落,得到第一鸟巢群落
32、步骤s7的具体实现过程包括:
33、利用下式更新第t+1次迭代中第一鸟巢群落内第i2个鸟巢的位置xjt和xkt是从第一鸟巢群落中随机选取的两个鸟巢的位置,heaviside函数表示当pa>rand时,heaviside=0,即鸟巢位置进行了保留,当pa<rand时,heaviside=1,即鸟巢位置进行了随机局部游走,
34、作为一个发明构思,本发明还提供了一种超磁致伸缩换能器电磁-机耦合参数辨识系统,其包括:
35、一个或多个处理器;
36、存储器,其上存储有一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现本发明上述方法的步骤。
37、作为一个发明构思,本发明还提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现本发明上述方法的步骤。
38、本发明提出一种基于布谷鸟与人工鱼群算法的混合算法(afsa-cs)。人工鱼群算法在迭代前期具有较快的收敛速度以及良好的全局搜索能力,能够快速地定位全局最优解区域,也即全局搜索能力强;布谷鸟算法由莱维飞行和局部莱维游走组成,前者利于全局搜索,后者利于局部精细化搜索,两者的共同点是都使用了莱维分布,即一种大步长和小步长随机相间的位置更新方法,一方面大步长对于全局搜索有利,但另一方面大步长的出现也会使得局部精细化搜索能力有所减弱,由于混合算法前期使用鱼群算法进行了全局搜索,所以在布谷鸟算法中需加强局部精细化搜索能力,本发明对布谷鸟算法的步长缩放因子和发现概率进行改进,使两者随着迭代增加而非线性递减,使得局部莱维游走次数更加频繁并且减弱了大步长对局部精细化搜索的影响,在鱼群算法结束后再使用上述改进的布谷鸟算法可以使得局部搜索更加精确。在改进的afsa-cs算法中,迭代前期使用鱼群算法,后期使用布谷鸟算法,可以使得混合算法搜索前期的全局搜索能力强,在搜索后期的局部精细化寻优能力强,具有较快的收敛速度,收敛精度高。在换能器磁-机-热能量转化过程中,使用afsa-cs算法对换能器磁机耦合模型中的参数进行辨识,使建立的模型能更加有效描述换能器实际的输入输出特性,并对换能器的研制起到较好的指导作用。与现有技术相比,本发明所具有的有益效果为:本发明提出了一种基于布谷鸟和人工鱼群算法的超磁致伸缩换能器电磁-机耦合参数辨识方法,从而实现利用混合算法实现电磁机耦合模型参数的快速和准确辨识,混合算法在迭代前期具有较强全局搜索能力,在迭代后期具有较强局部搜索能力,从而降低算法陷入局部最优解的可能,使得建立的模型能更加有效描述换能器实际的输入输出特性,可以更好地指导换能器设计。
- 还没有人留言评论。精彩留言会获得点赞!