一种农作物成熟期智能预测系统的制作方法
本发明涉及图像数据处理,具体涉及一种农作物成熟期智能预测系统。
背景技术:
1、目前,利用遥感图像对农作物成熟度进行预测,主要依靠计算机视觉与人工智能相结合的技术手段进行实现,利用遥感图像进行农作物成熟度预测技术已经在国内外的相关实验项目中得到了应用,该技术可以大大提高对农作物成熟度预测的准确度和效率。虽然计算机视觉和人工智能技术已经取得了很大的进步,但是相关预测模型仍然存在一定的缺陷,模型的准确性和可靠性需要不断地提高和完善。
2、由于田地图像中农作物区域不仅受到道路干扰,而且同一批的农作物由于受到位置的影响,导致不同位置农作物的成熟期存在一定的差异,导致在利用色调区间进行分割时,由于人为预设的色调区间可能不准确,导致提取的农作物区域不完整,影响利用计算机视觉对农作物成熟期的预测结果。
3、本发明提出了一种农作物成熟期智能预测系统,该系统利用不同色调区间获取田地图像中不同情况下的农作物区域,根据农作物区域与道路区域之间的关系,获取农作物区域与道路区域之间的贴合程度,根据贴合程度的大小获取理想的色调区间,以得到准确完整的农作物区域,以便于进一步实现农作物成熟期智能预测的准确性。
技术实现思路
1、本发明提供一种农作物成熟期智能预测系统,以解决现有的问题。
2、本发明的一种农作物成熟期智能预测系统采用如下技术方案:
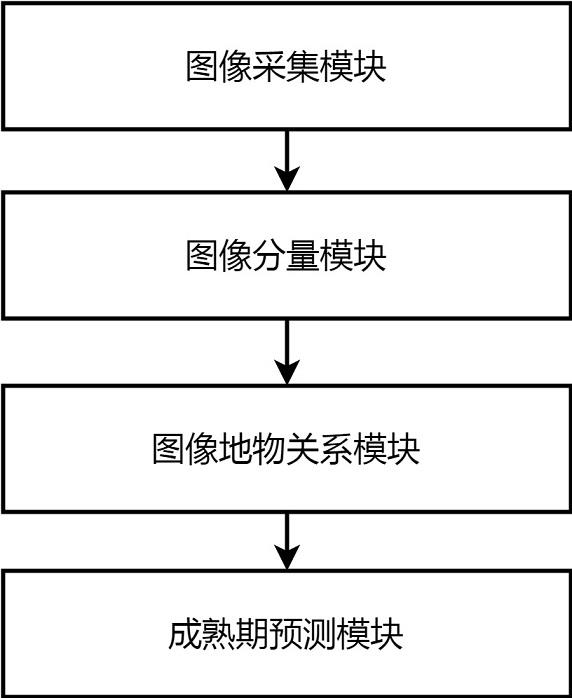
3、本发明提供了一种农作物成熟期智能预测系统,该系统包括以下模块:
4、图像采集模块:获取田地图像以及对应的田地灰度图像;
5、图像分量模块:利用预设农作物色调区间以及道路色调区间,获取田地图像中的农作物区域图像和道路区域图像;
6、图像地物关系模块:根据农作物区域图像和道路区域图像获得第一图像,根据第一图像获得第一面积,根据农作物区域图像获得第二面积;根据第一面积和第二面积的差异获得缺失或重叠程度;根据农作物区域图像、道路区域图像以及田地灰度图像,获得农作物区域灰度图像和道路区域灰度图像,根据缺失或重叠程度,以及农作物区域灰度图像和道路区域灰度图像中边缘像素点之间的距离,获得贴合程度;
7、成熟期预测模块:将农作物色调区间和道路色调区间的中点值之间的差值绝对值记为偏移量,预设若干个农作物色调区间以及道路色调区间的范围大小和偏移量,根据农作物色调区间以及道路色调区间的范围大小和偏移量,获得若干个贴合程度,根据贴合程度的大小获得对应的农作物区域rgb图像,利用农作物区域rgb图像实现农作物成熟期的智能预测。
8、进一步的,所述利用预设农作物色调区间以及道路色调区间,获取田地图像中的农作物区域图像和道路区域图像,包括的具体步骤如下:
9、首先,将田地图像转换至hsv颜色模型空间中,并获取田地图像对应的色调分量图像;
10、然后,预设农作物色调区间以及道路色调区间,并获取色调分量图像对应的颜色分布直方图,结合农作物色调区间,将色调分量图像中颜色值在农作物色调区间范围内的像素点的像素值设定为1,将颜色值在农作物色调区间范围外的像素点的像素值设定为0,获得一个二值图像,记为农作物区域图像;根据道路色调区间,将色调分量图像中颜色值在道路色调区间范围内的像素点的像素值设定为1,将颜色值在道路色调区间范围外的像素点的像素值设定为0,获得一个二值图像,记为道路区域图像。
11、进一步的,所述根据农作物区域图像和道路区域图像获得第一图像,根据第一图像获得第一面积,根据农作物区域图像获得第二面积,包括的具体步骤如下:
12、首先,将农作物区域图像和道路区域图像进行叠加,记为第一图像;
13、然后,对第一图像进行凸包检测,获得农作物区域图像和道路区域图像中所形成的凸包区域,凸包区域的面积包含了田地图像中农作物区域的面积、道路区域的面积以及农作物区域缺失部分的面积,记为第一面积;
14、最后,利用连通域检测获得农作物区域图像中若干个连通域对应的面积,记为第二面积。
15、进一步的,所述根据第一面积和第二面积的差异获得缺失或重叠程度,包括的具体步骤如下:
16、将所有第二面积的总和记为第三面积;
17、将第一面积与第三面积的差值记为缺失或重叠程度。
18、进一步的,所述贴合程度,获取方法如下:
19、首先,将道路区域图像作为掩膜,将道路区域图像与田地灰度图像相乘,将相乘后的结果图像记为道路区域灰度图像;将农作物区域图像作为掩膜,将农作物区域图像与田地灰度图像相乘,将相乘后的结果图像记为农作物区域灰度图像;
20、然后,利用sobel算子获取道路区域灰度图像和农作物区域灰度图像中的边缘像素点,分别记为道路边缘像素点和农作物边缘像素点;获取任意农作物边缘像素点与所有道路边缘像素点之间欧氏距离的最小值,记为任意农作物边缘像素点的贴合因子,获得若干个贴合因子;
21、最后,根据农作物区域与道路区域的缺失或重叠程度以及贴合因子,获得农作物区域与道路区域的贴合程度,具体获取方法为:
22、
23、其中,表示农作物区域与道路区域的贴合程度,表示第i个农作物边缘像素点的贴合因子,a表示农作物区域灰度图像中边缘像素点的数量,表示农作物区域与道路区域的缺失或重叠程度,exp()表示以自然常数为底的指数函数。
24、进一步的,所述根据农作物色调区间以及道路色调区间的范围大小和偏移量,获得若干个贴合程度,根据贴合程度的大小获得对应的农作物区域rgb图像,包括的具体步骤如下:
25、首先,将色调的取值范围大小作为农作物色调区间和道路色调区间的范围和偏移量的取值范围,预设农作物色调区间和道路色调区间范围大小和偏移量,分别记为农作物色调区间的初始范围大小、道路色调区间的初始范围大小和初始偏移量,利用预设步长分别对农作物色调区间的初始范围大小、道路色调区间的初始范围大小和初始偏移量进行迭代增加,获得若干个农作物色调区间的范围大小、道路色调区间的范围大小和偏移量;
26、然后,所有农作物色调区间的范围大小、道路色调区间的范围大小和偏移量进行组合,将组合的数组记为色调数组,获得若干个色调数组,由于农作物色调区间和道路色调区间的位置没有确定,则每一个色调数组对应若干个农作物色调区间和道路色调区间;
27、其次,利用所有农作物色调区间和道路色调区间进行图像分量模块、图像地物关系模块中的操作,获得若干个农作物区域与道路区域的贴合程度,将贴合程度最大时对应的农作物色调区间和道路色调区间作为理想的农作物色调区间和道路色调区间;
28、最后,利用理想的农作物色调区间获取对应的农作物区域图像,将农作物区域图像作为掩膜,将农作物区域图像与田地图像相乘,获得农作物区域rgb图像。
29、进一步的,所述利用农作物区域rgb图像实现农作物成熟期的智能预测,包括的具体步骤如下:
30、利用训练好的神经网络对农作物区域rgb图像进行分析,实现农作物成熟期智能预测,具体方法为:
31、首先,获取大量的不同时间不同地区的农作物区域rgb图像,由相关农业专家将农作物距离成熟剩余的天数,作为每一张农作物区域rgb图像的人工标签,每一张带有人工标签的农作物区域rgb图像作为一个样本,则所有样本构成alexnet神经网络的数据集;
32、然后,将数据集输入alexnet神经网络,采用交叉熵损失函数进行神经网络训练,获得训练完成的神经网络;
33、最后,将获得的农作物区域rgb图像输入到训练完成的神经网络中,得到农作物距离成熟剩余的天数,实现对农作物成熟期的智能预测。
34、本发明的技术方案的有益效果是:能够根据图像中的色调范围,对农作物区域提取过程中,对农作物区域获取结果的影响,结合农作物区域与道路区域之间的位置关系,获得不同色调范围下农作物区域与道路区域对应的贴合程度,根据贴合程度的大小获取准确且完整的农作物区域,避免了农作物区域获取不完整时,对农作物整体的成熟期预测准确性不足的问题,提高了对农作物成熟期预测的准确性,实现了农作物成熟期预测的智能化。
- 还没有人留言评论。精彩留言会获得点赞!