一种罐装船货物流向管控方法及系统与流程
本发明涉及水泥运输,尤其涉及一种罐装船货物流向管控方法及系统。
背景技术:
1、水泥是国民经济建设的重要基础原材料,目前国内外尚无一种材料可以替代它的地位。随着我国经济的高速发展,水泥在国民经济中的作用越来越大。水泥在过去十年的产量也是一直居高不下,水泥的运输方式有陆运也有水运,一般水运采用罐装船体来运输散装水泥。相比起陆运,水运有着运输距离长、价格低廉、性价比高等特点,一直以来都受到广大的水泥厂商的欢迎。因此基于水泥本身的货值,水泥若长途运输便会运费高于货值的现象,完全丧失产品竞争力,所以一般水泥运输半径陆地运输为200km、水路运输为500km。基于水泥对区域的强烈依赖性,一般水泥公司将根据销售区域不同而划分不同的价格,因此水泥的实际流向区域变的尤其重要,成为各大水泥生产厂商的关注焦点。
2、目前,国内针对大型船舶货物的运输监控主要是在码头或者在船舶上安装摄像头,利用摄像头对船体的识别从而判断当前船体是否处于上货、卸货、即将进入码头或者将要远离码头等的行为。在码头装设摄像头,虽然可以识别到水泥罐装船的上卸货行为,但是无法监查水泥罐装船在码头以外的区域是否存在有偷卸货行为,无法全天候检测罐装船货物流向,存在监控死角。在船身安装摄像头,虽然可以监控到水泥罐装船全程的上卸货行为,但是由于在野外光照强度、大雾遮挡和阴影等问题导致摄像头的识别准确率下降,误识别等问题。上述的方案都是对船舶进行监控,现有技术会导致无法准确的对船舶进行全天候或者精准的流向管控。
技术实现思路
1、本发明提供了一种罐装船货物流向管控方法及系统,用于提高罐装船货物流向管控的准确率。
2、本发明第一方面提供了一种罐装船货物流向管控方法,所述罐装船货物流向管控方法包括:
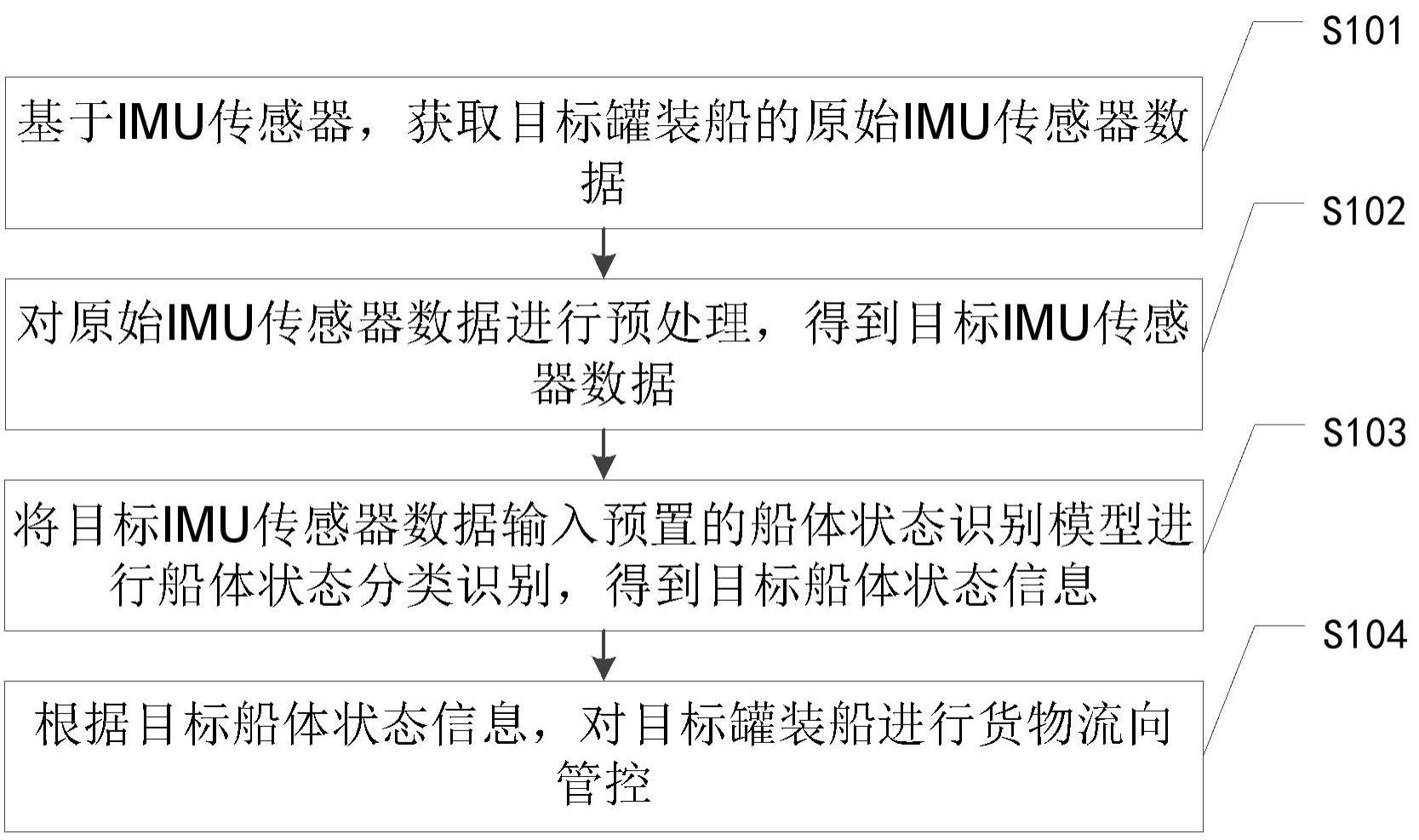
3、基于imu传感器,获取目标罐装船的原始imu传感器数据;
4、对所述原始imu传感器数据进行预处理,得到目标imu传感器数据;
5、将所述目标imu传感器数据输入预置的船体状态识别模型进行船体状态分类识别,得到目标船体状态信息;
6、根据所述目标船体状态信息,对所述目标罐装船进行货物流向管控。
7、结合第一方面,在本发明第一方面的第一实施方式中,所述对所述原始imu传感器数据进行预处理,得到目标imu传感器数据,包括:
8、对所述原始imu传感器数据进行降噪处理,得到降噪imu传感器数据;
9、基于预置的一阶差分计算函数,对所述降噪imu传感器数据进行一阶差分,得到目标imu传感器数据。
10、结合第一方面,在本发明第一方面的第二实施方式中,所述对所述原始imu传感器数据进行降噪处理,得到降噪imu传感器数据,包括:
11、基于预置的小波基函数,对所述原始imu传感器数据进行多尺度分解,得到多组小波系数,其中,每组小波系数包括:细节系数和粗近似系数;
12、基于预设阈值和软阈值函数,对所述多组小波系数进行过滤,得到过滤后的小波系数,其中,所述软阈值函数为:
13、;
14、其中,所述小波系数为,小波估计系数为,阈值为;
15、对所述过滤后的小波系数进行变换重构,得到降噪imu传感器数据。
16、结合第一方面,在本发明第一方面的第三实施方式中,所述基于预置的一阶差分计算函数,对所述降噪imu传感器数据进行一阶差分,得到目标imu传感器数据,包括:
17、基于预置的一阶差分计算函数,对所述降噪imu传感器数据进行一阶差分,得到一阶差分数值,其中,所述一阶差分计算函数为:
18、;
19、其中,表示当前时刻加速计x轴的差分值,指的是上一时刻加速计x轴的值;
20、根据所述imu传感器的采集频率和所述一阶差分数值,生成目标imu传感器数据。
21、结合第一方面,在本发明第一方面的第四实施方式中,所述将所述目标imu传感器数据输入预置的船体状态识别模型进行船体状态分类识别,得到目标船体状态信息,包括:
22、对所述目标imu传感器数据进行标准化处理,得到标准化一阶差分数据;
23、将所述标准化一阶差分数据输入预置的船体状态识别模型,其中,所述船体状态识别模型为双向循环门控单元网络;
24、通过所述双向循环门控单元网络对所述标准化一阶差分数据进行船体状态分类识别,得到目标分类标签;
25、根据所述目标分类标签生成所述目标罐装船的目标船体状态信息,其中,所述目标船体状态信息为以下任一种:上货、卸货、运动以及静止。
26、结合第一方面,在本发明第一方面的第五实施方式中,所述对所述目标imu传感器数据进行标准化处理,得到标准化一阶差分数据,包括:
27、对所述目标imu传感器数据进行均值计算,得到一阶差分的均值,以及对所述目标imu传感器数据进行方差计算,得到一阶差分的方差;
28、通过预设的标准化函数,根据所述一阶差分的均值和所述一阶差分的方差对所述目标imu传感器数据进行标准化处理,得到标准化一阶差分数据;
29、其中,所述标准化函数为:
30、;
31、其中,为标准化一阶差分数据,为一阶差分求和值,为一阶差分的均值,为一阶差分的方差。
32、结合第一方面,在本发明第一方面的第六实施方式中,所述根据所述目标船体状态信息,对所述目标罐装船进行货物流向管控,包括:
33、获取所述目标罐装船的gps位置信息;
34、根据所述目标船体状态信息确定所述目标罐装船的当前状态为上货或者卸货;
35、当所述目标罐装船的当前状态为上货时,判断所述gps位置信息是否为设定位置,得到第一判断结果;
36、若所述第一判断结果为否,则生成所述目标罐装船的异常上货告警信息,并发出异常上货警报;
37、当所述目标罐装船的当前状态为卸货时,判断所述gps位置信息是否为设定位置,得到第二判断结果;
38、若所述第二判断结果为否,则生成所述目标罐装船的异常卸货告警信息,并发出异常卸货警报。
39、本发明第二方面提供了一种罐装船货物流向管控系统,所述罐装船货物流向管控系统包括:
40、获取模块,用于基于imu传感器,获取目标罐装船的原始imu传感器数据;
41、预处理模块,用于对所述原始imu传感器数据进行预处理,得到目标imu传感器数据;
42、识别模块,用于将所述目标imu传感器数据输入预置的船体状态识别模型进行船体状态分类识别,得到目标船体状态信息;
43、管控模块,用于根据所述目标船体状态信息,对所述目标罐装船进行货物流向管控。
44、本发明第三方面提供了一种罐装船货物流向管控设备,包括:存储器和至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述罐装船货物流向管控设备执行上述的罐装船货物流向管控方法。
45、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的罐装船货物流向管控方法。
46、本发明提供的技术方案中,基于imu传感器,获取目标罐装船的原始imu传感器数据;对原始imu传感器数据进行预处理,得到目标imu传感器数据;将目标imu传感器数据输入预置的船体状态识别模型进行船体状态分类识别,得到目标船体状态信息;根据目标船体状态信息,对所述目标罐装船进行货物流向管控,本发明能够全天候、24小时不间断的对罐装船货物进行流向管控,且无惧天气光照条件,这避免罐装船离开码头后无法继续监控,或者装在罐装船上但是无法克服光照、大雾遮挡和阴影等问题使得摄像头的识别准确率大幅下降等问题。本发明可以长时间持续的对罐装船流向进行管控,同时对罐装船异常上货或者卸货等问题进行及时警报,比起现有技术可以更大程度的减低货物损失,进而提高了罐装船货物流向管控的准确率。
- 还没有人留言评论。精彩留言会获得点赞!