一种多区域类型多推理预警机制的临界防护方法与流程
本发明涉及安全防护,具体涉及一种多区域类型多推理预警机制的临界防护方法。
背景技术:
1、钻机从业人员越来越重视人员的人身安全,尤其是钻井作业高风险区域,即钻机钻台面井口区域,该区域涉及到游车高速上提下放、钻柱高速旋转和高压泥浆通过,极其危险。在平时作业活动中,钻工会间歇性地进入该区域参与“提卡坐卡”和“挂吊卡”等必要性工作,如果司钻与钻工配合不好,或者钻工误闯入该危险区域(比如游车还在全速下放,钻工走到井口范围,钻工可能被坠物砸伤),就极易造成人身伤亡事故。目前,针对危险区域井口的人员安全防护,现场一般的做法是:第一,在井口一圈,地面标记红色油漆,提示危险区域;第二,依靠个人经验,即设备停稳,钻工确认安全后,人员进入;第三,依靠司钻提醒,设备停稳,司钻招呼钻工进入,如发现有安全隐患,及时喊话提醒。但是,一旦提醒不到位或者个人安全意识不足的情况下,就极易发生个人安全事故。
2、现有技术中,应用于石油钻机的危险区域预警方法通过判断井口区域安全状态进行预警;在运行工况为正常时,读取并分析实时图像,通过人脸识别技术实现入侵人员身份确认,进行预警;在运行工况为异常时,无需读取实时图像,直接进行预警;整个过程高效快捷,优化预警流程,保证预警准确率。
3、另外可以基于摄像头拍摄的视频图像,结合深度学习目标检测算法和危险区域判断,在人员出现安全事故前停止吊机运行,最大可能的避免安全事故的发生。与传统方法相比,除无人值守外,具有可视化、与吊机联合判断的优势。
4、但是,现有技术停留在单一推理机制,仅通过目标检测机器视觉对人员进行检测,当人员数量增加、场景复杂时检测精度会有所下降。
技术实现思路
1、本发明提供一种多区域类型多推理预警机制的临界防护方法,以解决现有技术中存在的上述问题。
2、本发明提供一种多区域类型多推理预警机制的临界防护方法,该方法包括:
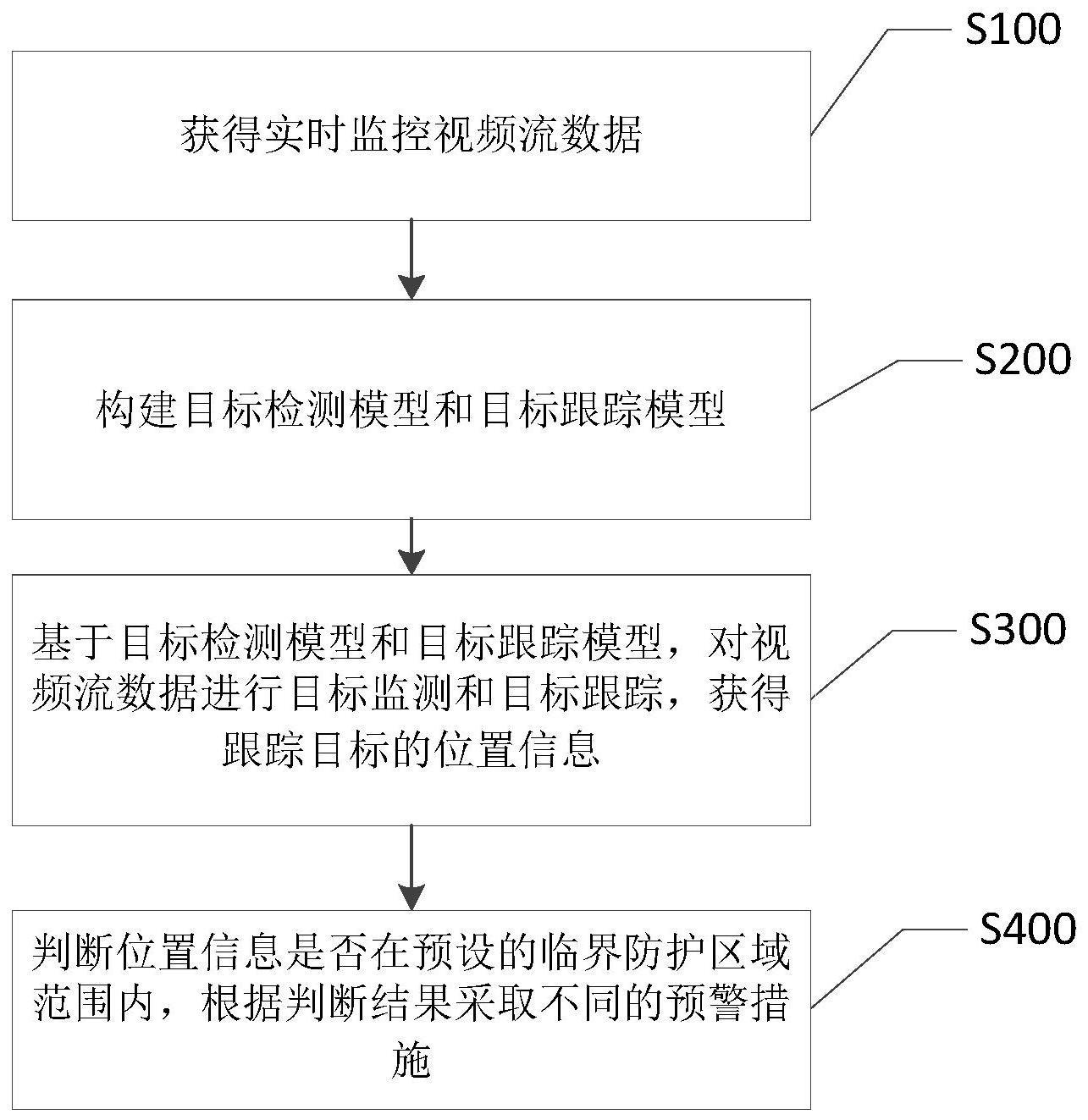
3、s100,获得实时监控视频流数据;
4、s200,构建目标检测模型和目标跟踪模型;
5、s300,基于目标检测模型和目标跟踪模型,对视频流数据进行目标监测和目标跟踪,获得跟踪目标的位置信息;
6、s400,判断位置信息是否在预设的临界防护区域范围内,根据判断结果采取不同的预警措施。
7、优选的,所述s200中,构建目标检测模型,包括:
8、s201,构建yolov8-f网络结构,将yolov8的骨干网络backbone由yolo backbone替换为fasternet backbone;
9、s202,fasternet以改进的pconv和pwconv作为核心的算子;
10、s203,基于构建的yolov8-f网络结构,对yolov8-f工地行人检测模型进行训练,获得目标检测模型。
11、优选的,所述s203包括:
12、s2031,采集建筑工地不同区域类型监控设备的视频流数据;
13、s2032,对视频流数据按每60帧提取一帧的方式进行抽帧处理,构建工地行人数据集;
14、s2033,将工地行人数据集划分为训练集、验证集以及测试集,对yolov8-f工地行人检测模型进行训练,获得目标监测模型。
15、优选的,所述s200中,构建目标跟踪模型,包括:
16、s204,根据目标检测模型获得待监测目标的位置信息和置信度;
17、s205,对待监测目标进行预测,获得预测目标,将待监测目标和预测目标进行匹配,获得匹配结果;
18、s206,设置置信度阈值,基于置信度阈值和匹配结果筛选出跟踪目标,形成目标跟踪模型。
19、优选的,所述s300包括:
20、s301,结合目标监测模型的检测识别结果,搭建strongsort目标跟踪模型,用于对工地行人实现实时跟踪;
21、s302,strongsort目标跟踪模型采用yolov8-f目标监测模型对工地行人进行检测,采用ecc算法进行摄像机运动补偿,ecc为enhanced correlation coefficient;
22、s303,采用nsa卡尔曼算法对工地行人运动轨迹的下一帧位置进行预测,利用ema(exponential moving average)特征更新策略,使用表观特征提取器bot对检测目标与预测目标进行匹配;
23、s304,将匹配结果与通过检测阈值筛选的目标进行融合输出,得到当前视频帧图像的跟踪目标。
24、优选的,所述s400中,判断位置信息是否在预设的临界防护区域范围内,包括:
25、s401,对检测区域进行人为界定,结合图像和视频处理库获取需要进行临界防护的区域范围;
26、s402,获取出现在监控视频特定区域内跟踪目标的位置信息的中点坐标;
27、s403,比对该中点坐标与临界防护的区域的关系,采用pnpoly算法判定该中点坐标是否在临界防护的区域的范围内。
28、优选的,所述s400中,根据判断结果采取不同的预警措施,包括:
29、s404,结合应用侧特定场景自定义推理,判断是否需要对踏入相关区域的人员进行实时预警;
30、s405,临界防护预警,其中危险区域及区域内人员均以红色实线标出,人员上方和下方分别显示置信度和唯一标识id。
31、优选的,所述s203还包括:
32、s2034,训练yolov8-f目标监测模型,训练模型的深度depth_multiple为1,宽度width_multiple为1.25;
33、s2035,图片的尺寸为512x512,batch-size为16,训练300轮;
34、s2036,优化fitness函数使p,r,map@0.5,map@0.5:0.95按5:1:2:2的比例计算模型评分,得到效果最优的yolov8-f目标检测模型用于后续目标跟踪任务。
35、优选的,所述s403步骤之后,还包括:
36、s406,在设定时间内,获取跟踪目标的位置转换次数;
37、s407,判断位置转换次数是否大于等于设定次数阈值,若大于等于设定次数阈值,判定为有效移动;
38、s408,确定有效移动的移动路径,从移动路径中随机抽取若干个点,确定若干组位置坐标;
39、s409,判断每组位置坐标是否落入临界防护的区域范围内,若落入临界防护的区域范围内的组数超过设定值,则判定跟踪目标落入临界防护的区域范围。
40、优选的,所述s401包括:
41、s4011,结合图像和视频处理库获取输入的图像,从输入的图像中提取第一分量,所述第一分量包括:光度畸变值和几何畸变值;
42、s4012,根据所述第一分量计算所述图像中每个像素的特征值,所述特征值是以光度畸变值和几何畸变值确定的畸变出现的概率;
43、s4013,根据所述特征值计算每个像素的畸变调整参数;
44、s4014,对输入的图像中每个像素进行噪声检测,判断所述图像中的每个像素是否为噪声点;
45、s4015,当所述像素为非噪声点时,通过畸变调整参数对所述像素进行像素校正;
46、s4016,基于像素校正后的图像获取需要进行临界防护的区域范围。
47、与现有技术相比,本发明具有以下优点:
48、本发明提供一种多区域类型多推理预警机制的临界防护方法,包括:获得实时监控视频流数据;构建目标检测模型和目标跟踪模型;基于目标检测模型和目标跟踪模型,对视频流数据进行目标监测和目标跟踪,获得跟踪目标的位置信息;判断位置信息是否在预设的临界防护区域范围内,根据判断结果采取不同的预警措施。针对不同类型工地特征,结合目标检测与目标跟踪技术,实现多区域类型多推理预警机制的临界防护,从而对踏入相关区域的人员进行有效预警,极大程度减少人力投入,提高监管可靠性与安全性。
49、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
50、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!