非接触式城市洪涝积水监测异常数据修正方法
本发明属于城市洪涝积水监测数据的质量,具体涉及一种非接触式城市洪涝积水监测异常数据修正方法。
背景技术:
1、受全球气候变化导致的极端暴雨、城市“雨岛效应”形成的局部强降雨以及快速城市化引起的下垫面特性改变造成的影响,城市洪涝灾害频发,已成为制约城市发展与运行管理的一个非常突出的问题。目前新型城镇化快速推进,可以预见,城市洪涝灾害将在未来一段时期内长期存在。
2、积水监测城市洪涝防灾减灾体系最基本的组成部分之一,是洪涝预警预报、防洪预案编制及风险评估的重要基础。随着城市洪涝灾害形势越发严峻,许多城市已建立起了积水监测系统,实时监测区域内主要积水点的水深变化,并基于监测数据发布预警信息。随着监测数据的积累,逐步发现监测数据存在大量异常现象。对于非接触式积水监测设备,如超声波液位计,由于设备不与路面发生接触,安全性较高,但极易受到路面车辆行驶导致积水数据振荡,或车辆在液位计下停车和行人通过导致数据异常波动的问题,数据质量难以有效支撑城市洪涝灾害防治。
技术实现思路
1、本发明的目的是提供一种非接触式城市洪涝积水监测异常数据修正方法,解决了现有技术中存在的积水监测由于车辆或行人导致积水数据异常的问题。
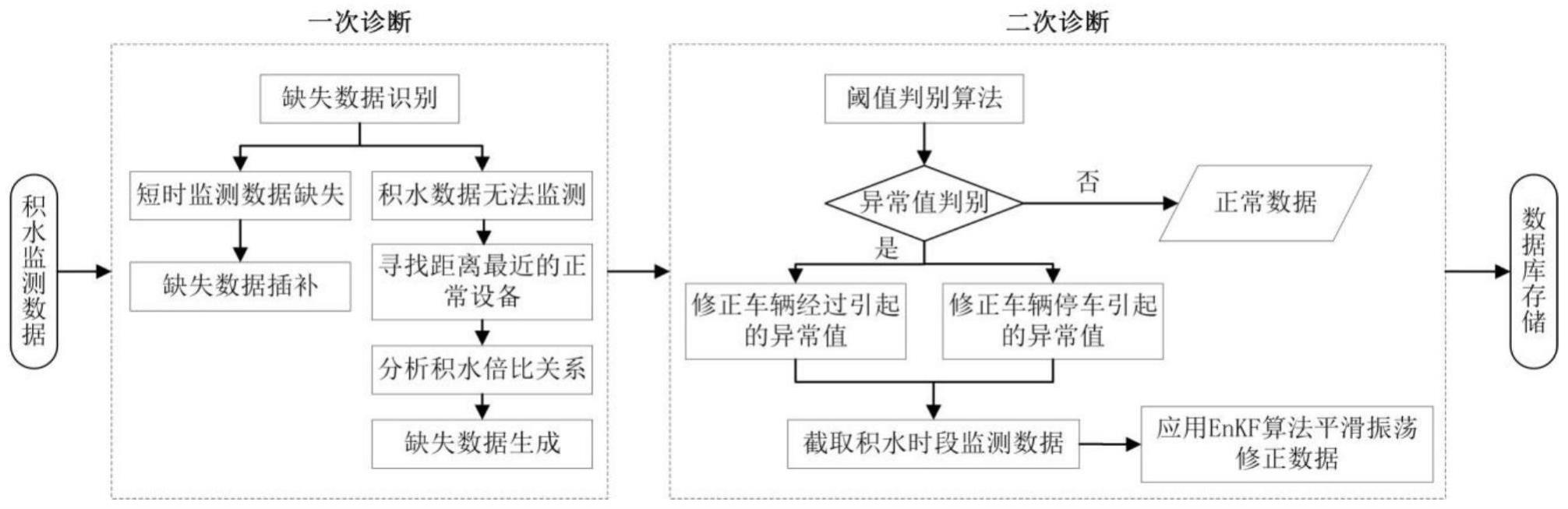
2、本发明所采用的技术方案是,非接触式城市洪涝积水监测异常数据修正方法,具体按照以下步骤实施:
3、步骤1、判断是积水监测设备数据传输故障造成的短时监测数据缺测,还是硬件故障导致无法监测;
4、步骤2、采用插补算法对短时积水监测数据缺测值进行数据插补;
5、步骤3、基于其他相近地区的积水监测设备值对因设备损坏导致长时间无法监测的积水点数据进行生成;
6、步骤4、对车辆经过或停车引起的异常波动数据进行修正;
7、步骤5、截取积水时段监测数据;
8、步骤6、对汽车行驶引起的振荡过程使用集合卡尔曼滤波算法进行修正。
9、本发明的特点还在于,
10、步骤1具体按照以下步骤实施:
11、计算积水深度缺测数据的时间长短,计算公式为:
12、tq=tj-ti
13、其中,tq为缺测数据的时间间隔,tj为最新的缺测数据时间,ti为第一个缺测数据时间的前一时刻,当tq<α时,α为阈值,则是传输故障造成的短时监测数据缺测;当tq≥α时,则是硬件故障导致设备无法监测;i为第一个缺测数据的前一时刻数据序列编号;j为最新的缺测数据序列编号;q表示是缺测数据的时间间隔。
14、步骤2具体如下:
15、
16、式中,为缺测数据;i为缺测数据的时间顺序,i=1,2,3……;dn为缺测前最后一位实测数据,dm为缺测后第一位实测数据,δt为监测数据的时间间隔,δtm-n为监测数据dm和dn的时间间隔;n为缺测前最后一位实测数据的数据序列编号;m为缺测后第一位实测数据的数据序列编号;q表示当前计算的水位数据为缺测数据。
17、步骤3具体按照以下步骤实施:
18、以故障设备为圆心,计算各邻近设备与故障设备的距离,进一步获得最短距离,确定距离故障设备最近的1个正常设备;
19、计算各正常运行设备与已故障设备的距离lb:
20、
21、lmin=min(l1,l2,l3,...,lb)
22、式中,lb为正常设备与故障设备的距离;b为设备编号,b=1、2、3…;xf、yf分别为故障设备在x和y方向相对坐标;xb、yb分别为各正常设备在x和y方向相对坐标;lmin为最小距离;f表示坐标为故障设备的坐标值。
23、计算最近一次积水事件中两个设备的监测数据倍比关系:
24、
25、
26、式中,mz为故障设备数据与正常设备数据的比值,z为积水数据的时间顺序,z=1,2,3……;maverage为所有积水数据比值的平均比值;为正常设备的监测值;为已故障设备的监测值;
27、根据比值与正常设备的监测数据生成故障设备的监测数据:
28、
29、式中,为缺测数据;i为缺测数据的时间顺序,i=1,2,3……;为正常设备的监测数据。
30、步骤4具体按照以下步骤实施:
31、首先对车辆经过引起的异常波动进行识别与处理:
32、对于i时刻水深di≠0,且i时刻前一时刻的水深di-1,i时刻后一时刻的水深di+1均等于0的情况,令di=0;
33、其次对车辆停车引起的异常波动数据进行识别与处理:
34、对于i时刻水深di≥γ,γ为事先设定的水深阈值,且i时刻前一时刻的水深di-1=0,i时刻后一时刻的水深di+1=di,且令di=di+1=0;若dc,c=i+2,i+3,…都等于未修正前的di,则令dc=0,直到监测值为0时,结束该项循环修正。
35、步骤5具体按照以下步骤实施:
36、确定积水时段的开始时刻和结束时刻,非零值前五分钟无积水,下一时刻有积水,则非零值前一时刻视为这一积水的开始时刻tstar;最后一个非零值后连续五分钟无积水,非零值后一时刻视为这一积水时段的结束时刻tend,
37、确定了时段tstar~tend后,从数据存储数据库筛选出该时段内的积水监测数据值di,i=star,stari+1,…,end。
38、步骤6具体按照以下步骤实施:
39、使用集合卡尔曼滤波算法enkf修正因汽车行驶引起的异常震荡数据;
40、滤波算法具体流程如下:
41、步骤6.1、初始化背景场,给出n个符合高斯分布的随机变量xi,i=1,...,n,状态变量为积水深度,即xi=di,使用高斯分布干扰初始序列数据,随机产生n组新的序列数据;
42、步骤6.2、计算各变量在k+1时刻的预测值
43、
44、其中,是变量在k+1时刻的预测值;是变量在k时刻的分析值,上标a表示该值为观测值,mk(·)是非线性模型算子;qk是模型误差方差矩阵;wi,k是高斯白噪声,其期望值为0,方差为qk;
45、步骤6.3、计算k+1时刻的卡尔曼增益矩阵:
46、
47、
48、
49、
50、
51、其中,是第i个随机变量在k+1时刻的预测值,下标k表示时刻;为第i个状态变量在k+1时刻的预测值;是状态变量在k+1时刻的预测平均值,rk是观测误差方差矩阵;hk(·)是观测算子,本方法中的状态变量和观测均为积水水深,所以hk(·)为标量;上标t表示为转置矩阵;上标f表示当前变量值为预测值;kk+1为卡尔曼增益矩阵;为状态转移矩阵;h为状态变量;n为产生的序列数据组数。
52、步骤6.4、计算在k+1时刻的分析场状态变量平均值和背景场误差方差矩阵
53、
54、
55、
56、其中,是第i个变量在k+1时刻的分析值;是状态变量在k+1时刻的平均值;vi,k是高斯白噪声,其期望值为0,方差为rk;;上标f表示当前变量值为预测值;上标a表示该值为观测值。
57、步骤6.5、计算过程返回到步骤6.2进行下一时刻的计算;
58、步骤6.6、循环计算直到预设时刻后,输出修正后的积水深度数据。
59、本发明的有益效果是,非接触式城市洪涝积水监测异常数据修正方法,采用“逐层研判、分级修正”的方法,对积水数据是否“缺测”、“波动”、“振荡”进行诊断,诊断正常的数据直接存入数据库,对不正常的数据进行插补、构建、滤波等修正后存储,能够有效提高存储和展示的数据质量,高效支撑城市洪涝防灾减灾工作。
- 还没有人留言评论。精彩留言会获得点赞!