目标的跟踪方法、装置、存储介质和云计算平台与流程
【】本发明实施例涉及目标跟踪,具体涉及一种目标的跟踪方法、装置、存储介质和云计算平台。
背景技术
0、
背景技术:
1、相关技术中,处于同一单点位的路侧雷达数据、视频数据,计算单元可进行多传感器数据融合,以实现同一目标物具有唯一的感知id号。若目标物的轨迹跨域多个单点位,同一个目标物在不同的单点位均具有唯一的感知id号,但是,多个感知id号并不相同,导致无法得到目标物跨越多个单点位的运行轨迹。
技术实现思路
0、
技术实现要素:
1、有鉴于此,本发明实施例提供了一种目标的跟踪方法、装置、存储介质和云计算平台,用以解决现有技术中无法得到目标物跨越多个单点位的运行轨迹的问题。
2、第一方面,本发明实施例提供了一种目标的跟踪方法,包括:
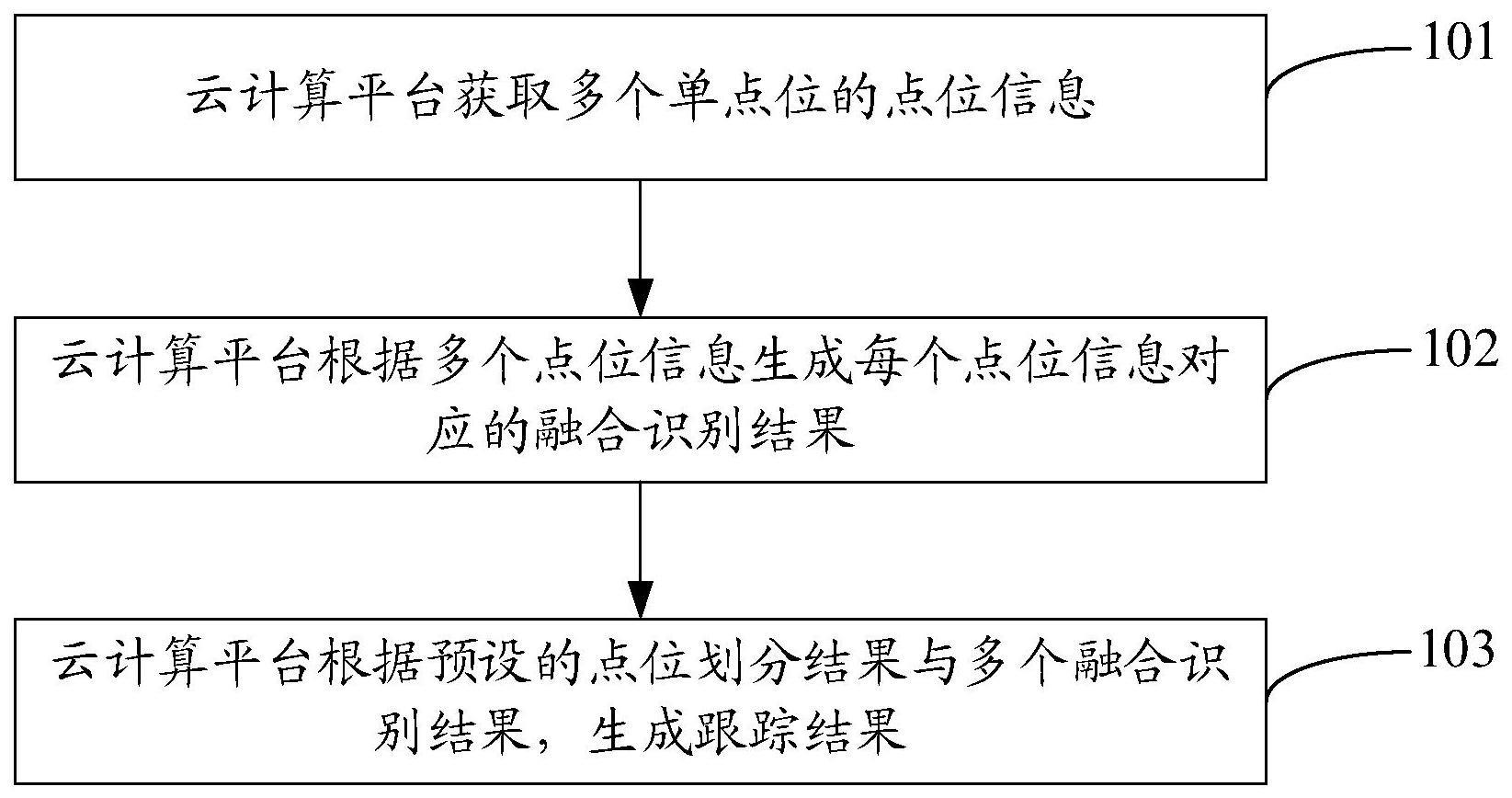
3、获取多个单点位的点位信息;
4、根据多个所述点位信息生成每个点位信息对应的融合识别结果;
5、根据预设的点位划分结果与多个所述融合识别结果,生成跟踪结果。
6、在一种可能的实现方式中,所述根据多个所述点位信息生成每个点位信息对应的融合识别结果,包括:
7、当所述点位信息包括一个摄像头信息时,通过识别算法,对所述摄像头信息进行识别,生成识别结果;将所述识别结果作为所述融合识别结果;或者,
8、当所述点位信息包括摄像头信息与雷达信息时,通过识别算法,对所述摄像头信息进行识别,生成识别结果;通过获取的距离门限与特定融合算法,根据所述识别结果与所述雷达信息,生成所述单点位融合结果;根据所述单点位融合结果与所述识别结果生成所述融合识别结果;或者,
9、当所述点位信息包括多个摄像头信息时,通过识别算法,对多个所述摄像头信息进行识别,生成每个摄像头信息对应的识别结果;通过特定融合算法,根据多个所述识别结果生成所述摄像头融合识别结果;根据所述摄像头融合识别结果与多个所述识别结果生成所述融合识别结果。
10、在一种可能的实现方式中,所述单点位包括连续区域点位或非连续区域点位,所述点位划分结果包括每个单点位对应的至少一个连续区域点位和/或至少一个非连续区域点位,所述跟踪结果包括多个所述连续区域点位对应的连续跨点位结果与多个所述非连续区域点位对应的非连续跨点位结果;所述根据预设的点位划分结果与多个所述融合识别结果,生成跟踪结果,包括:
11、根据所述点位划分结果,获取连续区域点位对应的目标连续区域点位;
12、根据所述连续区域点位对应的融合识别结果与所述目标连续区域点位对应的融合识别结果,生成所述连续跨点位结果;
13、根据所述点位划分结果与获取的预测轨迹,获取每个所述非连续区域点位对应的目标非连续区域点位;
14、根据所述非连续区域点位对应的融合识别结果与所述目标非连续区域点位对应的融合识别结果,生成所述非连续跨点位结果;
15、根据至少一个所述连续跨点位结果与至少一个所述非连续跨点位结果生成所述跟踪结果。
16、在一种可能的实现方式中,所述融合识别结果包括摄像头融合结果,所述摄像头融合结果包括至少一个目标物体的目标坐标与外观特征;所述根据所述连续区域点位对应的融合识别结果与所述目标连续区域点位对应的融合识别结果,生成所述连续跨点位结果,包括:
17、通过预先划分的重叠区域,从所述连续区域点位对应的第一摄像头融合结果中,查找出处于所述重叠区域内的第一目标物体的第一目标坐标;
18、通过所述重叠区域,从所述目标连续区域点位对应的第二摄像头融合结果中,查找出处于所述重叠区域内的第二目标物体的第二目标坐标;
19、通过双向匹配目标交接法,根据至少一个所述第一目标物体的所述第一目标坐标与至少一个所述第二目标物体的所述第二目标坐标,确定出所述第一目标物体对应的所述第二目标物体;
20、根据所述第一目标物体的第一外观特征与所述第一目标物体对应的所述第二目标物体的第二外观特征,生成第一匹配结果;
21、根据所述第一匹配结果、所述第一摄像头融合结果与所述第二摄像头融合结果生成所述连续跨点位结果。
22、在一种可能的实现方式中,所述第一外观特征包括第一外观图像,所述第二外观特征包括第二外观图像;所述根据所述第一目标物体的第一外观特征与所述第一目标物体对应的所述第二目标物体的第二外观特征,生成第一匹配结果,包括:
23、根据所述第一外观图像生成hsv格式的第一颜色模型;
24、根据所述第二外观图像生成hsv格式的第二颜色模型;
25、根据所述第一颜色模型与所述第二颜色模型生成目标相似度;
26、根据所述目标相似度生成所述第一匹配结果。
27、在一种可能的实现方式中,所述融合识别结果包括摄像头融合结果,所述摄像头融合结果包括至少一个目标物体的外观特征,所述根据所述非连续区域点位对应的融合识别结果与所述目标非连续区域点位对应的融合识别结果,生成所述非连续跨点位结果,包括:
28、根据所述非连续区域点位对应的第三目标物体的第三外观特征与所述目标非连续区域点位对应的第四目标物体的第四外观特征,生成第三目标物体与第四目标物体对应的第二匹配结果;
29、根据所述第二匹配结果、所述第三目标物体的对应的第三摄像头融合结果与所述第四目标物体对应的第四摄像头融合结果,生成所述非连续跨点位结果。
30、在一种可能的实现方式中,所述跟踪结果包括至少一个目标物体的显示编号,所述生成跟踪结果之后,还包括:
31、获取目标物体的行驶特征;
32、根据所述行驶特征生成时间阈值;
33、在所述时间阈值内判断是否存在与所述目标物体匹配的第二目标物体或第四目标物体;
34、若不存在与所述目标物体存在的第二目标物体或第四目标物体,将所述目标物体对应的所述显示编号删除。
35、第二方面,本发明实施例提供了一种目标的跟踪装置,包括:
36、第一获取模块,用于获取多个单点位的点位信息;
37、第一生成模块,用于根据多个所述点位信息生成每个点位信息对应的融合识别结果;
38、第二生成模块,用于根据预设的点位划分结果与多个所述融合识别结果,生成跟踪结果。
39、第三方面,本发明实施例提供了一种存储介质,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行上述第一方面或第一方面任一可能的实现方式中的目标的跟踪方法。
40、第四方面,本发明实施例提供了一种云计算平台,包括存储器和处理器,所述存储器用于存储包括程序指令的信息,所述处理器用于控制程序指令的执行,所述程序指令被处理器加载并执行时实现上述第一方面或第一方面任一可能的实现方式中的目标的跟踪方法的步骤。
41、本发明实施例提供的一种目标的跟踪方法、装置、存储介质和云计算平台的技术方案中,获取多个单点位的点位信息;根据多个点位信息生成每个点位信息对应的融合识别结果;根据预设的点位划分结果与多个融合识别结果,生成跟踪结果,从而云计算平台能够实现对单点位的信息进行融合,将多个单点位的融合后的信息再次进行融合,目标物体跨越多个点位移动时,实现对目标物体的多点位跨域连续追踪。
- 还没有人留言评论。精彩留言会获得点赞!