一种算法检测方法、计算机设备及可读存储介质与流程
本发明涉及自动驾驶,具体涉及一种算法检测方法、计算机设备及可读存储介质。
背景技术:
1、自动驾驶的过程,即是整套感知、预测、控制算法相互协作对车辆硬件进行调配调整的过程。因此,自动驾驶的车辆,尤其是在软件方面,每一套算法或策略,均与其上游、下游的算法或策略息息相关,可谓之牵一发而动全身。而随着基础设施的完善、获取的数据规模、数量、维度不断扩大,与感知融合相关的算法、策略也在不断地迭代更新。由于算法或策略的更新对其上下游其他算法或策略均产生着影响,因此,每一套新的算法或者策略在投入使用之前,必须要获知其对上下游其他算法或策略的影响属于正向影响还是负向影响。现有技术中的检测大多依靠数据标注或同步采集到的理论真值数据。但是,现有技术的检测方法,数据标注需要大量人工和时间,理论真值的可靠性难以得到保证。并且,在nac等城区测试场景中又会受到其他关联算法的局限,难以得到准确一致的检测效果。
技术实现思路
1、本发明旨在一定程度上解决相关技术中的技术问题之一。为此,本发明提供了一种算法检测方法,判断车辆感知系统的算法对其上下游的影响。
2、为了达到上述目的,本发明采用如下技术方案:
3、一种算法检测方法,用于检测带有自动驾驶功能的车辆的感知系统的算法,包括如下步骤:
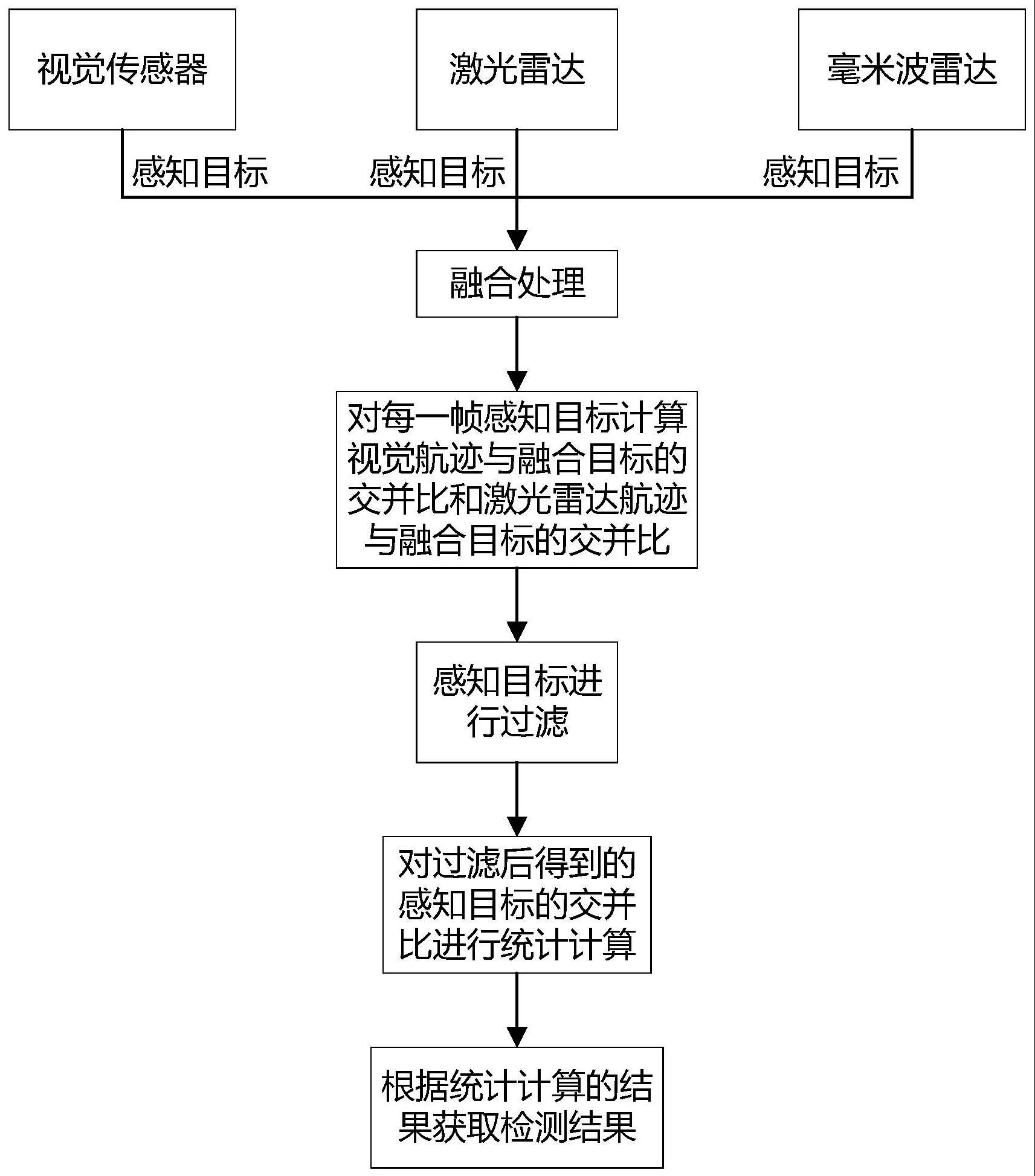
4、分别获取视觉传感器、激光雷达和毫米波雷达的感知目标的数据;
5、对感知目标的数据进行融合处理,形成融合目标、视觉航迹以及激光雷达航迹;
6、分别计算每一帧感知目标的数据第一交并比和第二交并比,所述第一交并比为视觉航迹的目标框与融合目标的目标框之间的交并比,所述第二交并比为激光雷达航迹的目标框和融合目标的目标框之间交并比;
7、对感知目标进行过滤,对过滤后得到的感知目标对应的第一交并比和第二交并比进行统计计算;
8、根据统计计算的结果获取检测结果。
9、可选的,对过滤后得到的感知目标对应的第一交并比和第二交并比进行统计计算包括:
10、对第一交并比计算概率分布、概率密度分布、目标框型分布、中位数、平均数、标准差以及90%分位点;
11、对第二交并比计算概率分布、概率密度分布、目标框型分布、中位数、平均数、标准差以及90%分位点。
12、可选的,根据统计计算的结果获取检测结果包括如下步骤:
13、基于已有数据确定检测基准;
14、采用已有数据运行被检测的算法,运行结果与已有数据的检测基准比对,如果运行结果相比已有数据的检测基准出现下降,则被检测的算法对当前车辆的软件和/或硬件起到负向作用;如果运行结果相比已有数据的检测基准出现上升,则被检测的算法对当前车辆的软件和/或硬件起到正向作用,更新检测基准;
15、循环如下步骤,直至所有新采集的数据由被检测的算法运行:
16、采用新采集的数据运行被检测的算法,并与更新后的检测基准比对,如果运行结果相比更新后的检测基准出现下降,则被检测的算法对当前车辆的软件和/或硬件起到负向作用;如果运行结果相比更新后的检测基准出现上升,则被检测的算法对当前车辆的软件和/或硬件起到正向作用,更新检测基准;
17、获取被检测的算法运行第一交并比的90%分位点、平均数点和中位数点的结果和运行第二交并比的90%分位点、平均数点和中位数点的结果,与更新后的检测基准比对,如果运行结果相比更新后的基均准出现上升,则被检测的算法对当前车辆的软件和/或硬件起到正向作用,如果任意一项运行结果相比更新后的检测基准出现下降,则被检测的算法对当前车辆的软件和/或硬件起到负向作用。
18、可选的,根据统计计算的结果获取检测结果还包括:
19、计算小于0.3的第一交并比或第二交并比与融合目标的目标框的长度或宽度小于1米的第一交并比和第二交并比的比例。
20、可选的,根据统计计算的结果获取检测结果还包括,对第一交并比或第二交并比小于0.5的感知目标,基于鸟瞰动态图定位现有算法系统的缺陷。
21、可选的,对感知目标的数据进行融合处理包括如下步骤:
22、判断获取感知目标的数据是否存在异常并剔除;
23、对于首帧感知目标的数据,由激光雷达起始一个航迹,而后判断视觉传感器的信号与激光雷达起始的航迹是否相关联,如果相关联,则进行激光雷达数据关联,如果无关联,则由视觉传感器重新起始一个航迹;而后判断毫米波雷达与激光雷达数据关联后的航迹或视觉传感器重新起始的航迹是否关联,如果相关联,进行下一步,如果无关联,则重新起始一个航迹;
24、首帧之后,对每一帧感知目标的数据循环如下操作:卡尔曼滤波预测,激光雷达数据关联,视觉传感器数据关联,毫米波雷达数据关联;
25、循环结束输出的航迹为融合目标,激光雷达的感知目标经过数据关联形成激光雷达航迹,视觉传感器的感知目标经过数据关联形成视觉航迹。
26、可选的,激光雷达数据关联为计算航迹与激光雷达的感知目标的加权平均值,所述加权平均值为感知目标的横、纵向距离以及横、纵向速度的加权平均值,而后采用匈牙利匹配算法对两者进行配对;
27、视觉传感器数据关联为计算航迹与视觉传感器的感知目标的加权平均值,所述加权平均值为感知目标的横、纵向距离以及横、纵向速度的加权平均值,而后采用匈牙利匹配算法对两者进行配对;
28、毫米波雷达数据关联为计算航迹与毫米波雷达的感知目标的加权平均值,所述加权平均值为感知目标的横、纵向距离以及横、纵向速度的加权平均值,而后采用最近邻配对算法对两者进行配对。
29、可选的,计算每一帧感知目标的数据第一交并比和第二交并比时,如果在当前帧融合目标与视觉传感器无关联,则第一交并比为-1,如果在当前帧融合目标与激光雷达无关联,则第二交并比为-1。
30、可选的,对感知目标进行过滤包括如下过滤条件:
31、纵向位置大于80米或小于-50米的感知目标;
32、横向位置大于8米或小于-8米的感知目标;
33、融合目标的目标框长度小于1米的感知目标;
34、融合目标的目标框宽度小于1米的感知目标;
35、第一交并或第二交并比为-1的感知目标。
36、可选的,对感知目标进行过滤还包括如下过滤条件:
37、对于激光雷达的感知目标,过滤激光雷达的感知目标与融合目标的横向距离差的绝对值大于0.8的感知目标。
38、可选的,所述算法检测方法还包括获取融合目标的相关信息,所述相关信息包括:时间戳、帧序数、传感器id、横纵向位置、感知目标的长度、感知目标的宽度、航向角以及目标类别。
39、本发明所提供的技术方案,通过对算法中的交并比等部分参数进行统计分析,不仅可以挖掘感知系统潜在的性能缺陷,有效的反应自动驾驶系统在真实复杂场景中的感知能力,更能准确获知新的算法对其上下游的影响。不仅如此,基于对交并比等部分参数进行统计分析,在检测算法同时,还能对数据进行验证,实现数据、算法的闭环检测。
40、由于本发明所提供的技术方案对算法中的交并比等部分参数进行统计分析,因此,相比于现有技术所采用的仿真、数据标注或同步采集到的理论真值数据等方式,极大降低了人工成本和时间成本。
41、并且,本发明还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述的算法检测方法。
42、同时,一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一项所述的算法检测方法。
43、本发明的这些特点和优点将会在下面的具体实施方式以及附图中进行详细的揭露。本发明最佳的实施方式或手段将结合附图来详尽表现,但并非是对本发明技术方案的限制。另外,在每个下文和附图中出现的这些特征、要素和组件是具有多个,并且为了表示方便而标记了不同的符号或数字,但均表示相同或相似构造或功能的部件。
- 还没有人留言评论。精彩留言会获得点赞!