港口作业调度方法、装置及设备与流程
本发明涉及港口调度,尤其涉及一种港口作业调度方法、装置及设备。
背景技术:
1、随着无人驾驶技术在港口不断应用的推广,港口自动化、无人化已成为减少成本、提高港口作业效率的必然趋势。随着港口大型化、自动化和智能化水平的不断提高,无人驾驶集装箱卡车(即无人集卡)已逐渐应用于港口。无人集卡具备控制方便、稳定性好,精准度高等优点,在解决港区交通拥堵问题及提高运输效率方面有巨大的潜力。目前可以实现有人集卡和无人集卡混行作业,但是无人集卡在作业中存在效率低和安全问题。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种港口作业调度方法、装置及设备,旨在解决现有港口无人集卡在作业中存在效率低和安全问题的技术问题。
2、为实现上述目的,本发明提供了一种港口作业调度方法,所述港口作业调度方法,包括:
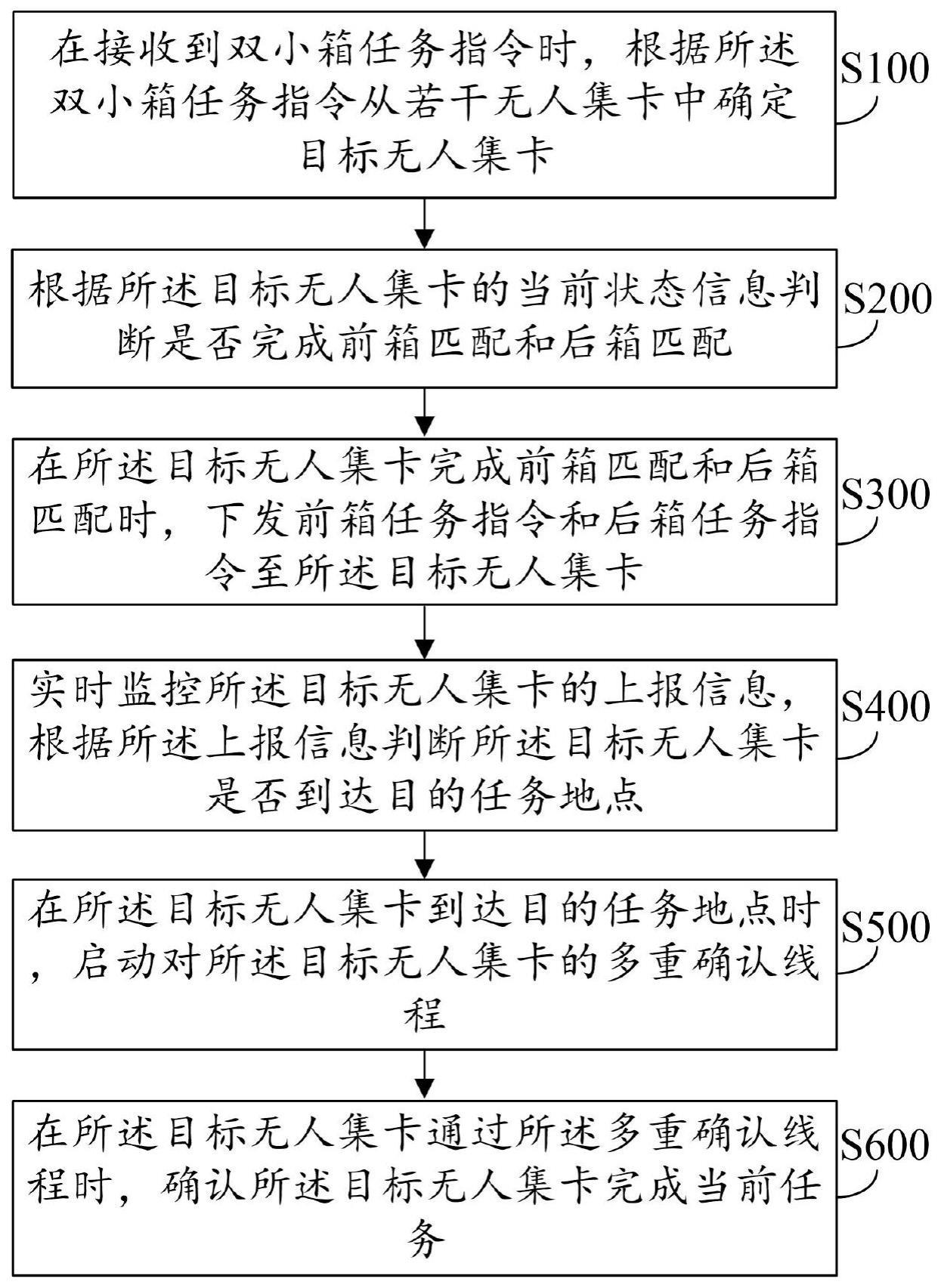
3、在接收到双小箱任务指令时,根据所述双小箱任务指令从若干无人集卡中确定目标无人集卡;
4、根据所述目标无人集卡的当前状态信息判断是否完成前箱匹配和后箱匹配;
5、在所述目标无人集卡完成前箱匹配和后箱匹配时,下发前箱任务指令和后箱任务指令至所述目标无人集卡;
6、实时监控所述目标无人集卡的上报信息,根据所述上报信息判断所述目标无人集卡是否到达目的任务地点;
7、在所述目标无人集卡到达目的任务地点时,启动对所述目标无人集卡的多重确认线程;
8、在所述目标无人集卡通过所述多重确认线程时,确认所述目标无人集卡完成当前任务。
9、在一些实施例中,所述在接收到双小箱任务指令时,根据所述双小箱任务指令从若干无人集卡中确定目标无人集卡,包括:
10、根据所述双小箱任务指令获取车辆识别码、对位信息、作业类型以及任务类型;
11、根据所述车辆识别码、对位信息、作业类型以及任务类型在若干无人集卡中进行双小箱任务匹配,以获得目标无人集卡。
12、在一些实施例中,所述根据所述目标无人集卡的当前状态信息判断是否完成前箱匹配和后箱匹配;包括:
13、根据所述目标无人集卡的当前状态信息判断双小箱前箱和双小箱后箱是否到齐;其中,所述双小箱前箱相对靠近所述目标无人集卡的车头,所述双小箱后箱相对远离所述目标无人集卡的车头;
14、在所述双小箱前箱和双小箱后箱到齐时,对所述双小箱前箱和双小箱后箱进行对位;
15、在所述双小箱前箱和双小箱后箱完成对位时,执行双小箱前箱匹配和双小箱后箱匹配。
16、在一些实施例中,所述方法还包括:
17、在所述目标无人集卡的双小箱前箱和双小箱后箱到齐时,下发前箱任务指令;
18、根据所述前箱任务指令控制所述双小箱前箱执行当前前箱任务;
19、在所述双小箱前箱执行所述当前前箱任务时,监控是否存在更新前箱任务指令;
20、在接收到所述更新前箱任务指令时,下发所述更新前箱任务指令至所述双小箱前箱并修改所述当前前箱任务的状态为被覆盖。
21、在一些实施例中,所述方法还包括:
22、在所述目标无人集卡的双小箱前箱匹配完成时,下发后箱任务指令;
23、根据所述后箱任务指令控制所述双小箱后箱执行当前后箱任务;
24、在所述双小箱后箱执行所述当前后箱任务时,监控是否存在更新后箱任务指令;
25、在接收到所述更新后箱任务指令时,下发所述更新后箱任务指令至所述双小箱后箱并修改所述当前后箱任务的状态为被覆盖。
26、在一些实施例中,所述方法还包括:
27、在所述双小箱后箱执行所述当前后箱任务时,监控是否存在刷新前箱任务指令;
28、在接收到所述刷新任务指令时,推送任务错误信息并修改刷新前箱任务的状态为异常。
29、在一些实施例中,所述在所述目标无人集卡到达目的任务地点时,启动对所述目标无人集卡的多重确认线程,包括:
30、在所述目标无人集卡到达目的任务地点时,获取所述目标无人集卡在多重确认线程的确认次数和所述目标无人集卡的最后状态时间;
31、在所述确认次数大于预设确认次数并且所述最后状态时间与当前时间的时间差值大于预设阈值时,确认所述目标无人集卡任务超时且未通过所述多重确认线程。
32、在一些实施例中,所述获取所述目标无人集卡在所述多重确认线程的确认次数和所述目标无人集卡的最后状态时间之后,还包括:
33、在所述确认次数小于或等于预设确认次数并且所述最后状态时间与当前时间的时间差值小于或等于预设阈值时,获取所述目标无人集卡的司机确认状态信息;
34、判断所述司机确认状态信息是否符合预设确认信息;
35、在所述司机确认状态信息符合所述预设确认信息时,确认所述目标无人集卡通过所述多重确认线程。
36、此外,为实现上述目的,本发明还提出一种港口作业调度装置,所述港口作业调度装置,包括:
37、接收模块,用于在接收到双小箱任务指令时,根据所述双小箱任务指令从若干无人集卡中确定目标无人集卡;
38、匹配模块,用于根据所述目标无人集卡的当前状态信息判断是否完成前箱匹配和后箱匹配;
39、下发模块,用于在所述目标无人集卡完成前箱匹配和后箱匹配时,下发前箱任务指令和后箱任务指令至所述目标无人集卡;
40、监控模块,用于实时监控所述目标无人集卡的上报信息,根据所述上报信息判断所述目标无人集卡是否到达目的任务地点;
41、多重确认模块,用于在所述目标无人集卡到达目的任务地点时,启动对所述目标无人集卡的多重确认线程;
42、任务完成模块,用于在所述目标无人集卡通过所述多重确认线程时,确认所述目标无人集卡完成当前任务。
43、此外,为实现上述目的,本发明还提出一种港口作业调度设备,所述港口作业调度设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的港口作业调度程序,所述港口作业调度程序配置为实现如上述实施例所述的港口作业调度方法。
44、本发明通过在接收到双小箱任务指令时,根据所述双小箱任务指令从若干无人集卡中确定目标无人集卡;根据所述目标无人集卡的当前状态信息判断是否完成前箱匹配和后箱匹配;在所述目标无人集卡完成前箱匹配和后箱匹配时,下发前箱任务指令和后箱任务指令至所述目标无人集卡;实时监控所述目标无人集卡的上报信息,根据所述上报信息判断所述目标无人集卡是否到达目的任务地点;在所述目标无人集卡到达目的任务地点时,启动对所述目标无人集卡的多重确认线程;在所述目标无人集卡通过所述多重确认线程时,确认所述目标无人集卡完成当前任务。本发明中,基于无人集卡的当前状态信息即车辆实时数据和多重确认线程的现场多方面确认,在保证作业效率的同时,极大提升作业的安全性。本发明逻辑简单,易实现,实用性强,对环境适应性强,无需场地及设备改造,实现成本及周期低,对双小箱任务指令进行严格控制提高了无人集卡在作业中的效率和安全,解决了现有港口无人集卡在作业中存在效率低和安全问题的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!