一种基于人工智能的车辆目标检测方法及系统
本发明涉及智能监测,尤其涉及一种基于人工智能的车辆目标检测方法及系统。
背景技术:
1、车辆和行人是视频场景中关键的对象,行人车辆检测技术有很强的使用价值,可以与行人跟踪,行人重识别、智能交通等技术结合,智能车辆包括车辆自动驾驶技术和车辆目标检测技术,一定程度影响到车辆自动驾驶安全性方面。
2、现有技术中,在车辆目标检测过程中,存在错检漏检、重叠遮挡漏检等问题,使得车辆检测的准确率和检测效率不满足使用需求,无法均衡设备内存和计算量的基础上,保证车辆检测的准确率,车辆目标检测性能低。
3、由此可知,现有技术中存在车辆检测的准确率和检测效率低的技术问题。
技术实现思路
1、本发明提出一种基于人工智能的车辆目标检测方法及系统,用以解决或者至少部分解决现有技术中存在的车辆检测准确率和效率低的技术问题。
2、为了解决上述技术问题,本发明技术方案为:
3、第一方面提供了一种基于人工智能的车辆目标检测方法,包括:
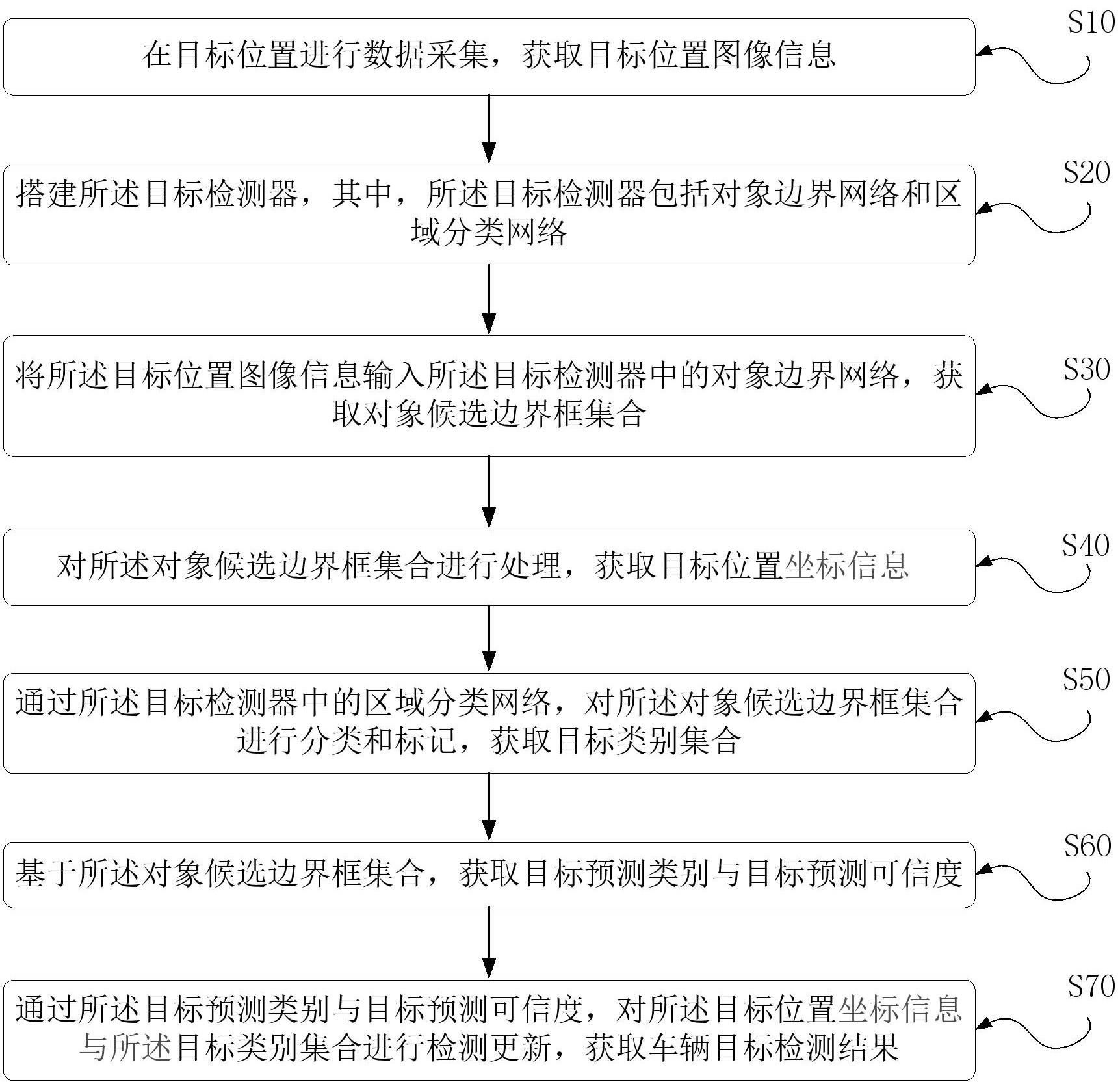
4、在目标位置进行数据采集,获取目标位置图像信息;
5、搭建目标检测器,其中,所述目标检测器包括对象边界网络和区域分类网络;
6、将所述目标位置图像信息输入所述对象边界网络,获取对象候选边界框集合;
7、对所述对象候选边界框集合进行坐标定位处理,获取目标位置坐标信息;
8、通过所述区域分类网络,对所述对象候选边界框集合进行分类和标记,获取目标类别集合;
9、基于所述对象候选边界框集合,获取目标预测类别与目标预测可信度;
10、通过所述目标预测类别与目标预测可信度,对所述目标位置坐标信息与所述目标类别集合进行更新,获取车辆目标检测结果。
11、在一种实施方式中,所述搭建目标检测器包括:
12、以完全卷积的区域提议网络为模型基础,确定目标检测器的第一级,将目标检测器的第一级定义为对象边界网络;
13、以r-cnn算法为算法基础,确定目标检测器的第二级,将目标检测器的第二级定义为区域分类网络;
14、将所述对象边界网络与所述区域分类网络构建为目标检测器。
15、在一种实施方式中,所述以完全卷积的区域提议网络为模型基础,确定目标检测器的第一级,包括:
16、获取目标位置的历史图像信息与预设图片滑动步长;
17、将所述目标位置的历史图像信息带入完全卷积的区域提议网络,通过所述预设图片滑动步长,进行像素分类,获取历史分类训练样本;
18、通过所述历史分类训练样本,确定目标检测器的第一级,所述目标检测器的第一级用于进行边界分割。
19、在一种实施方式中,所述以r-cnn算法为算法基础,确定目标检测器的第二级,包括:
20、以r-cnn算法为算法基础,将全连接层的权重w重塑成卷积层的滤波器,获取预设滤波器尺寸;
21、获取数据采集对应的视频分辨率;
22、通过所述预设滤波器尺寸与所述视频分辨率,筛选确定特征数据块;
23、通过所述特征数据块,确定目标检测器的第二级。
24、在一种实施方式中,所述基于所述对象候选边界框集合,获取目标预测类别与目标预测可信度,包括:
25、设定目标检测功能;
26、通过所述目标检测功能,配置预测数据包,所述预测数据包包括预测类别库与预测可信度库;
27、基于所述目标检测功能,在所述对象候选边界框集合进行密集抽样,获取密集抽样样本集;
28、基于所述密集抽样样本集,对所述预测数据包进行特征提取,获取目标预测类别与目标预测可信度。
29、在一种实施方式中,所述目标检测功能包括行人车辆检测流量计数,行人车辆检测流量计数的获取方式包括:
30、通过所述目标位置坐标信息与所述目标类别集合,用矩形框在目标位置图像信息上标记行人,获取标记位置信息与标记折叠;
31、从遮挡角度进行场景边缘变异识别,获取遮挡检测分量;
32、从外观差异角度,对所述标记位置信息进行柔性分析,获取外观柔性参变量;
33、通过所述外观柔性参变量与所述遮挡检测分量,结合标记位置信息与标记折叠,获取行人车辆流量计数结果。
34、在一种实施方式中,所述行人车辆流量计数结果包括车辆流量计数结果和行人流量计数结果,其中,行人车辆流量计数结果的计算方式为:
35、=
36、行人流量计数结果的计算方式为:
37、=
38、其中,表示车辆流量计数结果,表示车辆的质量,表示车辆外观柔性参变量,表示遮挡检测分量,表示标记折叠,表示行人流量计数结果,表示行人的质量,表示行人外观柔性参变量。
39、基于同样的发明构思,本发明第二方面提供了一种基于人工智能的车辆目标检测系统,包括:
40、数据采集模块,用于在目标位置进行数据采集,获取目标位置图像信息;
41、检测器搭建模块,用于搭建目标检测器,其中,所述目标检测器包括对象边界网络和区域分类网络;
42、信息输入模块,用于将所述目标位置图像信息输入所述对象边界网络,获取对象候选边界框集合;
43、目标位置坐标获取模块,用于对所述对象候选边界框集合进行坐标定位处理,获取目标位置坐标信息;
44、分类与标记模块,通过所述区域分类网络,对所述对象候选边界框集合进行分类和标记,获取目标类别集合;
45、预测数据获取模块,基于所述对象候选边界框集合,获取目标预测类别与目标预测可信度;
46、检测结果获取模块,通过所述目标预测类别与目标预测可信度,对所述目标位置坐标信息与所述目标类别集合进行更新,获取车辆目标检测结果。
47、基于同样的发明构思,本发明第三方面提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被执行时实现第一方面所述的方法。
48、基于同样的发明构思,本发明第四方面提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面所述的方法。
49、本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:
50、由于采用了在目标位置进行数据采集,获取目标位置图像信息;搭建目标检测器;将目标位置图像信息输入目标检测器中的对象边界网络,获取对象候选边界框集合,获取目标位置坐标信息;通过目标检测器中的区域分类网络,给对象候选边界框集合进行分类和标记,获取目标类别集合;基于对象候选边界框集合,获取目标预测类别与目标预测可信度,对目标位置坐标信息与目标类别集合进行更新,获取车辆目标检测结果,实现了考虑到遮挡、光照、视角各方面因素,对车辆与行人进行同步检测,排除不满足限速规范的驾驶行为,提高车辆检测的准确率和检测效率,维护车辆安全行驶,保证车辆目标检测置信度满足多个应用场景使用需求的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!