密集恒星长拖尾背景下暗弱凝视碎片目标检测方法与流程
本发明涉及碎片目标检测领域,特别涉及一种密集恒星长拖尾背景下暗弱凝视碎片目标检测方法。
背景技术:
1、随着民用航天的不断发展,卫星任务密集发射,空间碎片已经成为当前宇航任务安全可靠执行的重要影响因素。早期碎片监视主要依赖于地基雷达、天文望远镜,但随着碎片的不断增多,受限于观测时间和视场,近十年来逐渐转向天基碎片监视的研究。
2、天基空间碎片监视,主要依靠光学相机对碎片目标成像,得到类似“星表”的天文数据,根据恒星背景与目标之间运动状态的差异确认目标信息。但随着碎片目标向分米级、厘米级等小尺度不断增加,图像中的目标数量及内容复杂度也逐渐成为信息提取过程中的难点。对于远距离小尺度暗弱目标,为了达到足够检测识别的目标-背景信噪比,往往采用目标随动相机长时间曝光模式。在这种模式下,所凝视目标在图像上形成点目标信息,背景恒星形成长拖尾形状,非凝视目标形成拖尾长度不一的形状。
3、空间碎片目标检测早期主要是依赖长期观测进行定轨从而判断目标,随着图像处理技术的发展,当前基于图像处理的方法主要有两类:一类是根据相机成像数据与星表匹配,得到单个图像对天球的映射关系,再针对每个恒星目标进行匹配剔除,最终保留碎片目标数据信息;另一种是针对连续成像的前后帧进行配准-差分比对判断,依靠恒星与碎片目标的不同时域分布区分目标信息。这两类方法对短拖尾恒星背景下的数据处理具有较好的精度,在高信噪比下依托帧间差分计算能够兼顾实时性和准确度。
4、但在长拖尾恒星背景下,如附图1所示,由于噪声干扰、信噪比较低,恒星拖尾在图像上往往呈现灰度变化不平稳、不连续的“不稳定”状态,这些状态会严重干扰图像处理过程,同时,还会经常遇到碎片目标被恒星拖尾遮挡的情况,为长拖尾背景下暗弱凝视碎片目标检测进一步增加了困难。
技术实现思路
1、本公开提供一种密集恒星长拖尾背景下暗弱凝视碎片目标的检测方法,其能够降低噪声对拖尾信息的影响,提高恒星长拖尾遮挡点目标的检测性能。
2、本公开提供的密集恒星长拖尾背景下暗弱凝视碎片目标检测方法,包括以下步骤:
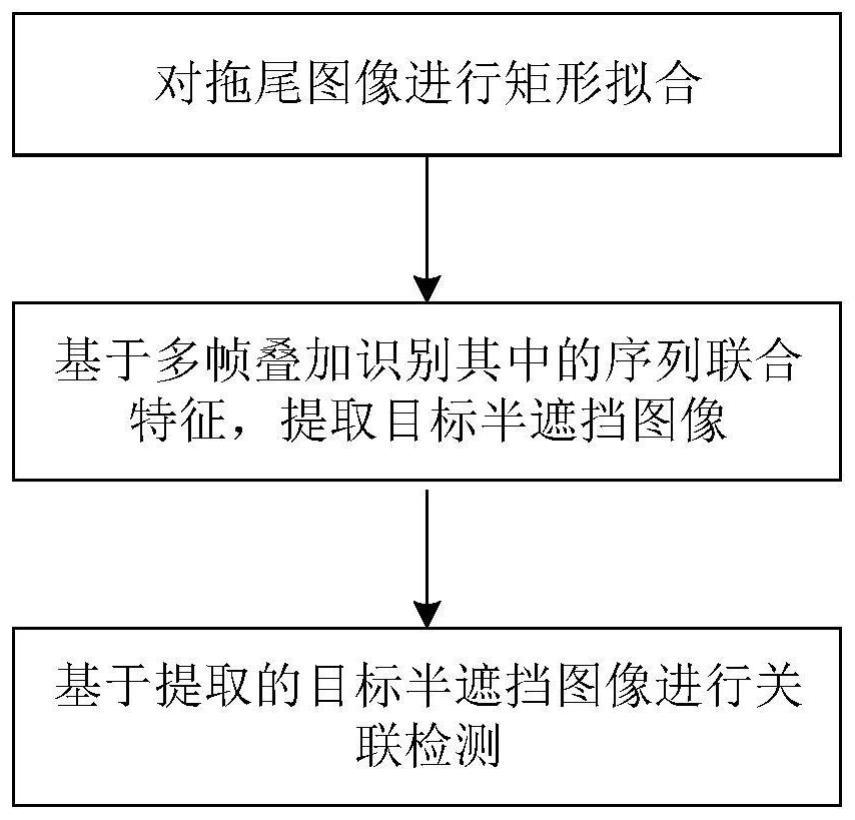
3、s1,对拖尾图像进行矩形拟合;
4、s2,对拟合后的图像中目标被恒星拖尾遮挡的状态进行分类,基于多帧叠加识别其中的序列联合特征,提取目标半遮挡图像;
5、s3,基于提取的目标半遮挡图像进行关联检测,实现碎片有效检测跟踪。
6、进一步的,步骤s1中对拖尾图像进行矩形拟合的方法具体包括:
7、步骤s1.1,定义图像为in,其中n为图像像素大小,定义不同大小的两个正方形算子,对图像in计算其对比度id;
8、步骤s1.2,对id进行传统二值标注计算,得到标注后的m目标集合:
9、
10、其中,x,y∈[0,n-1](x,y∈z+),m表示标记后的第m个目标,m∈[0,m-1],m∈z+;km表示第m个标记目标的最大像素个数;表示第m个标记目标第km像素的坐标,km∈[0,km-1],km∈z+;
11、步骤s1.3,对于任一个标注后的目标ib(m),求取其质心ic(m)的位置坐标:
12、
13、以第m个标记目标的质心为矩形内任一点,以恒星拖尾角度±θ为搜索方向,进行拟合矩形框搜索,得到第m个标记目标的生成矩形集合r(m),r(m,q)表示以ic(m)为任意一点的宽长分别为wf和lf的矩形的集合,q表示第q个矩形;
14、步骤s1.4,根据r(m,q)求取对应的图像区域为in(r(m,q)),计算矩形区域内灰度求和s(m,q)以及直方图h(m,q),得到最优矩形解算约束如公式(4)所示:
15、
16、其中,smin与smax为矩形区域内灰度求和上下限,hst为标准矩形区域拖尾目标直方图,三个阈值均为统计得到,用于约束公式(4)求取最优矩形拟合。
17、进一步的,所述步骤s1.1中所述正方形算子分别取为3×3和7×7。
18、进一步的,所述步骤s2中,目标被恒星拖尾遮挡的状态分为三类,包括:
19、情况1:遮挡超过2/3,即碎片目标只有一行露出恒星拖尾,此时碎片目标与恒星拖尾叠加;
20、情况2:遮挡在2/3到1/5之间,即碎片目标有两行以上露出恒星拖尾,此时在拖尾边缘处形成明显凸起;
21、情况3:遮挡在1/5以下,碎片目标与恒星拖尾仅有局部接触。
22、进一步的,所述步骤s2中,提取目标半遮挡图像的方法具体包括:
23、采用小型全连接卷积网络,基于前后连续三帧数据的输入,对矩形拟合后的边缘“凸起”信息作为疑似目标进行全连接卷积计算,最终确定是否为碎片目标。
24、进一步的,所述小型全连接卷积网络的结构包括:
25、 层数 卷积核 输入 输出 1 3×3×16 8×8(×3) 8×8×16 2 3×3×16×32 8×8×16 8×8×32 3 3×3×32×64 8×8×32 4×4×64 4 3×3×64×128 4×4×64 2×2×128 5 3×3×128×256 2×2×128 1×1×256 6 1×256 1×1×256 1×1
26、其中,输入端的(×3)表示扩展网络,用于前后连续三帧数据输入。
27、与现有技术相比,本公开的有益效果是:
28、(1)对长拖尾图像像素灰度变化不平稳、不连续的问题,采用矩形拟合,完成拖尾图像的聚合,降低噪声对拖尾信息的影响;
29、(2)分析目标遮挡状态,对半遮挡场景进行统计分类,采用基于全连接网络的有限点特征准确分类,提取半遮挡图像;
30、(3)针对恒星拖尾遮挡点目标导致无法持续帧间关联的问题,基于提取的半遮挡图像进行关联检测,提高目标的关联成功概率、实现碎片有效检测跟踪。
- 还没有人留言评论。精彩留言会获得点赞!