投放操作的执行方法和装置、存储介质及电子装置与流程
本技术实施例涉及计算机领域,具体而言,涉及一种投放操作的执行方法和装置、存储介质及电子装置。
背景技术:
1、目前,城市中已经存在一些喂食设备,通过定量投放食物对流浪动物进行喂食,但是,该定量投放的方式,在投放过多的情况下,会出现食物堆积,导致食物变质,一方面天气原因食物易腐败导致流浪动物生病,另一方面,变质的食物影响城市的卫生,在投放不足的情况下,不足以喂养流浪动物,使得喂养的效果较差。
2、针对相关技术中,在流浪动物的喂食过程中,食物的投放量与流浪动物的匹配度较低等问题,尚未提出有效的解决方案。
技术实现思路
1、本技术实施例提供了一种投放操作的执行方法和装置、存储介质及电子装置,以至少解决相关技术中,在流浪动物的喂食过程中,食物的投放量与流浪动物的匹配度较低等问题。
2、根据本技术实施例的一个实施例,提供了一种投放操作的执行方法,应用于目标自动投放设备,包括:
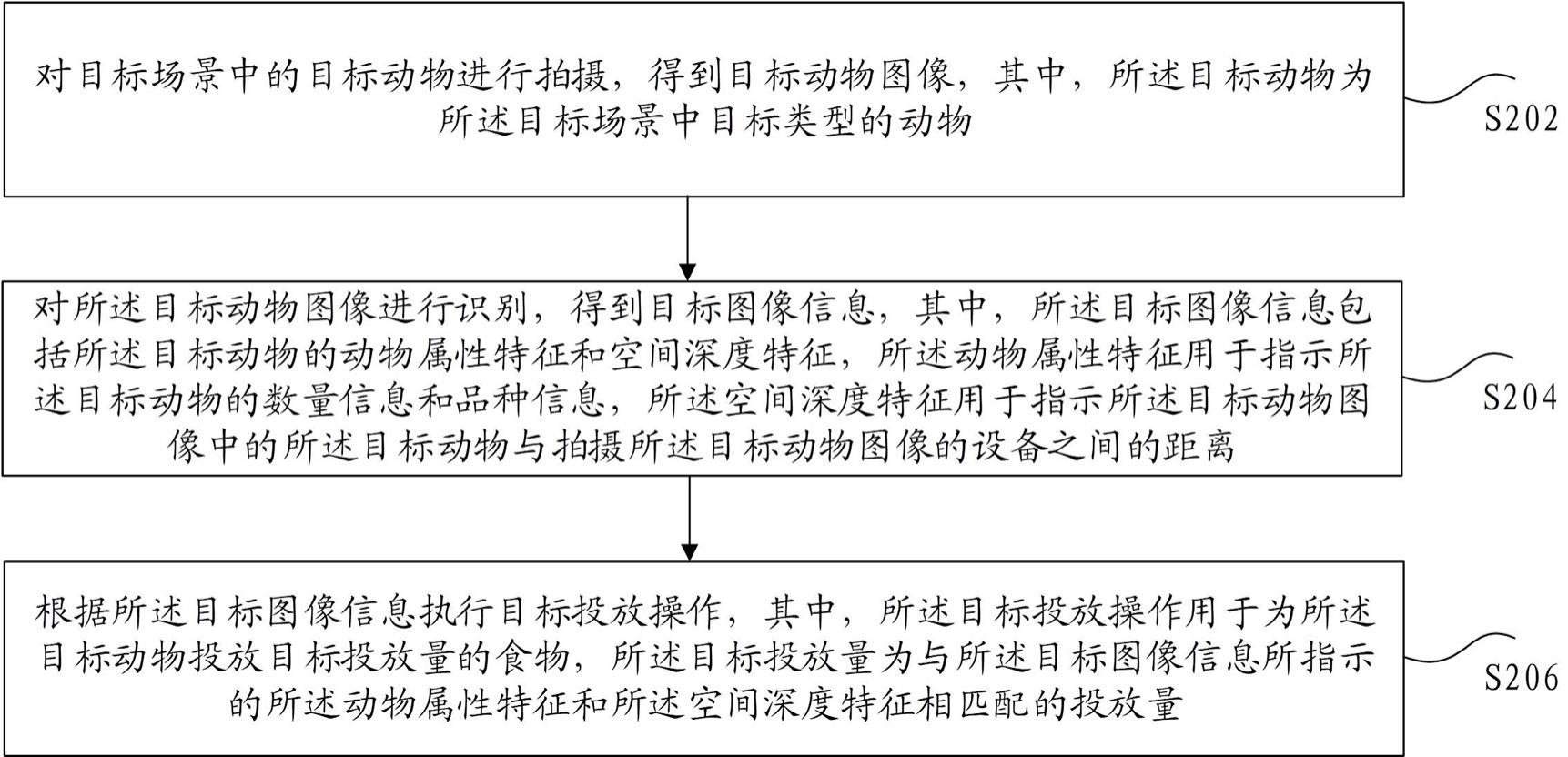
3、对目标场景中的目标动物进行拍摄,得到目标动物图像,其中,所述目标动物为所述目标场景中目标类型的动物;
4、对所述目标动物图像进行识别,得到目标图像信息,其中,所述目标图像信息包括所述目标动物的动物属性特征和空间深度特征,所述动物属性特征用于指示所述目标动物的数量信息和品种信息,所述空间深度特征用于指示所述目标动物图像中的所述目标动物与拍摄所述目标动物图像的设备之间的距离;
5、根据所述目标图像信息执行目标投放操作,其中,所述目标投放操作用于为所述目标动物投放目标投放量的食物,所述目标投放量为与所述目标图像信息所指示的所述动物属性特征和所述空间深度特征相匹配的投放量。
6、可选的,所述对所述目标动物图像进行识别,得到目标图像信息,包括:
7、将所述目标动物图像输入至目标识别模型,得到所述动物属性特征和所述空间深度特征,其中,所述目标识别模型是使用样本动物图像集合、对应的实际动物属性特征集合以及对应的实际空间深度特征集合对待训练识别模型进行训练得到的模型,所述实际动物属性特征集合中的每个实际动物属性特征用于指示所述样本动物图像集合中对应的样本动物图像中的样本动物的数量信息和品种信息,所述实际空间深度特征集合中的每个实际空间深度特征用于指示所述样本动物图像集合中对应的样本动物图像中的样本动物与拍摄所述样本动物图像的设备之间的距离,所述样本动物为所述目标类型的动物。
8、可选的,在所述将所述目标动物图像输入至所述目标识别模型之前,所述方法还包括:
9、获取所述样本动物图像集合,获取对应的所述实际动物属性特征集合,以及获取对应的所述实际空间深度特征集合;
10、使用所述样本动物图像集合、对应的所述实际动物属性特征集合以及对应的所述实际空间深度特征集合对所述待训练识别模型进行训练,直到所述待训练识别模型对应的目标损失值满足预设收敛条件,结束训练,并将训练结束时的待训练识别模型确定为所述目标识别模型,其中,在所述待训练识别模型对应的所述目标损失值不满足所述预设收敛条件的情况下,所述待训练识别模型中的识别参数被调整;所述目标损失值是根据第一损失值和第二损失值确定得到的损失值,所述第一损失值是预测动物属性特征和所述实际动物属性特征之间的损失值,所述预测动物属性特征是所述待训练识别模型根据输入的所述样本动物图像确定的动物属性特征,所述第二损失值是预测空间深度特征和所述实际空间深度特征之间的损失值,所述预测空间深度特征是所述待训练识别模型根据输入的所述样本动物图像确定的空间深度特征。
11、可选的,所述使用所述样本动物图像集合、对应的所述实际动物属性特征集合以及对应的所述实际空间深度特征集合对所述待训练识别模型进行训练,包括:
12、通过以下步骤对所述待训练识别模型进行第p轮训练,其中,p为大于或等于1的正整数:
13、将所述第p轮训练使用的样本动物图像输入第p-1轮训练得到的待训练识别模型,得到所述第p轮训练的所述预测动物属性特征和所述预测空间深度特征;其中,在p等于1时,所述第p-1轮训练得到的待训练识别模型是未经过训练的所述待训练识别模型;
14、确定所述第p轮训练的所述预测动物属性特征与所述第p轮训练使用的所述实际动物属性特征之间的损失值,得到所述第p轮训练的所述第一损失值,其中,所述第p轮训练使用的所述实际动物属性特征与所述第p轮训练使用的样本动物图像对应;
15、确定所述第p轮训练的所述预测空间深度特征与所述第p轮训练使用的所述实际空间深度特征之间的损失值,得到所述第p轮训练的所述第二损失值,其中,所述第p轮训练使用的所述实际空间深度特征与所述第p轮训练使用的样本动物图像对应;
16、根据所述第p轮训练的所述第一损失值和所述第p轮训练的所述第二损失值,确定所述第p轮训练的所述目标损失值;
17、在所述第p轮训练的目标损失函数的取值不满足所述预设收敛条件的情况下,对所述第p-1轮训练得到的待训练识别模型中的参数进行调整,以获得第p轮训练得到的待训练识别模型;
18、在所述第p轮训练的所述目标损失函数的取值满足所述预设收敛条件的情况下,结束训练。
19、可选的,所述获取对应的所述实际空间深度特征集合,包括:
20、通过以下步骤获取所述样本动物图像集合中的第i个样本动物图像中的样本动物的实际空间深度特征,其中,i和j均为大于或等于1的正整数:
21、根据第i个动物点云,确定第i个样本动物图像中的样本动物的实际空间深度特征,其中,具有对应关系的所述第i个样本动物图像和所述第i个动物点云是分别使用摄像设备和激光雷达对同一个样本动物进行拍摄和扫描得到的。
22、可选的,所述根据所述目标图像信息执行目标投放操作,包括:
23、根据所述目标图像信息所指示的所述动物属性特征和所述空间深度特征生成动物体型信息,其中,所述动物体型信息用于指示对应的目标图像信息中目标动物的体型大小;
24、根据所述目标图像信息所指示的所述数量信息,所述品种信息和所述动物体型信息确定目标投放量;
25、根据所述目标投放量执行所述目标投放操作。
26、可选的,所述根据所述目标图像信息所指示的所述数量信息,所述品种信息和所述动物体型信息确定目标投放量,包括:
27、通过以下公式确定每个所述目标图像信息对应的目标投放量:
28、
29、其中,为所述目标投放量,为所述数量信息指示的待喂食的目标动物的总数量,为在第一目标时间段内目标类型的单个动物所需的平均的投放量,为个目标动物中第i个目标动物的品种信息对应的第一权重,为个目标动物中第i个目标动物的动物体型信息对应的第二权重。
30、可选的,所述根据所述目标投放量执行所述目标投放操作,包括:
31、将所述目标投放量转换为开启时间参数,其中,所述开启时间参数用于指示控制所述目标自动投放设备的控制杆处于开启状态下的时间,所述目标自动投放设备通过目标容器储存食物,所述目标容器在所述控制杆处于开启状态的情况下投放食物至目标位置区域;
32、在所述开启时间参数所指示的时间执行所述目标投放操作。
33、可选的,所述在所述开启时间参数所指示的时间执行所述目标投放操作,包括:
34、生成携带了所述开启时间参数的目标控制指令,其中,所述目标控制指令用于指示在所述开启时间参数所指示的时间执行所述目标投放操作;
35、将所述目标控制指令发送至所述控制杆对应的控制器;
36、在所述开启时间参数所指示的时间通过所述控制器控制所述控制杆开启,其中,所述目标投放操作包括控制所述控制杆开启。
37、可选的,在所述根据所述目标图像信息执行目标投放操作之后,所述方法还包括:
38、在第二目标时间段内播放目标音频,和/或,释放目标气味,其中,所述目标音频和/或所述目标气味用于吸引目标动物靠近所述目标自动投放设备。
39、可选的,所述对目标场景中的目标动物进行拍摄,得到目标动物图像,包括:
40、调用n个摄像设备在第三目标时间段内以目标拍摄频率对所述目标动物进行m轮拍摄,得到m组初始动物图像集合,其中,每组初始动物图像集合包括n张初始动物图像,所述n张初始动物图像为所述n个摄像设备在同一时刻拍摄的动物图像;n张初始动物图像的拍摄视野覆盖了所述目标场景,n为大于或者等于1的正整数,m为大于或者等于1的正整数;
41、对所述m组初始动物图像集合中每组所述初始动物图像集合包括的n张所述初始动物图像进行拼接,得到m张所述目标动物图像。
42、可选的,对所述m组初始动物图像集合中每组所述初始动物图像集合包括的n张所述初始动物图像进行拼接,得到m张所述目标动物图像,包括:
43、通过以下步骤对所述m组初始动物图像集合中第k组所述初始动物图像集合包括的n张所述初始动物图像进行拼接,得到第k张目标动物图像:
44、匹配出n张所述初始动物图像中的重叠区域;
45、将去除了多余的所述重叠区域的n张所述初始动物图像进行拼接,得到所述目标动物图像。
46、可选的,所述匹配出n张所述初始动物图像中的重叠区域,包括:
47、使用不同的空间尺度参数对n张所述初始动物图像中的每张所述初始动物图像进行转换,得到n组动物尺度图像集合,其中,每组所述动物尺度图像集合包括多张动物尺度图像,所述空间尺度参数用于指示转换出的动物尺度图像的模糊程度,所述空间尺度参数越大,所述空间尺度参数转换出的动物尺度图像的越模糊;
48、从每组所述动物尺度图像集合包括的多张动物尺度图像中定位出尺度信息,位置信息和方向信息相同的目标像素点作为每组所述动物尺度图像集合对应的初始动物图像的图像关键点;
49、根据n张所述初始动物图像中的每张所述初始动物图像的所述图像关键点匹配出n张所述初始动物图像中的重叠区域。
50、可选的,所述方法还包括:
51、检测所述目标自动投放设备的充值状态;
52、在所述充值状态用于指示所述目标自动投放设备被充值了目标金额的情况下,检测所述目标自动投放设备在第一目标时间段内的喂食状态;
53、根据所述目标金额和所述喂食状态执行目标控制操作。
54、可选的,所述检测所述目标自动投放设备的充值状态,包括:
55、检测所述目标自动投放设备的本地充值入口的第一入口状态和远程充值入口的第二入口状态,其中,所述目标自动投放设备允许通过目标界面展示的本地充值入口进行充值,和/或,允许用户帐号登陆目标应用平台调用远程充值入口进行充值,所述目标应用平台为关联了多台自动投放设备的应用平台;
56、根据所述第一入口状态和所述第二入口状态确定所述目标自动投放设备的所述充值状态。
57、可选的,所述根据所述目标金额和所述喂食状态执行目标控制操作,包括:
58、将所述目标金额转化为候选投放量;
59、在所述喂食状态用于指示所述目标自动投放设备在第一目标时间段内已经执行了所述目标投放操作的情况下,在所述目标界面展示目标提示信息,其中,所述目标提示信息用于提示所述目标自动投放设备在第一目标时间段内已经执行了所述目标投放操作,当前充值的目标金额已经转化为候选投放量的食物,并于第四目标时间段后投放;
60、在所述喂食状态用于指示所述目标自动投放设备在第一目标时间段内未执行所述目标投放操作的情况下,投放所述候选投放量的食物。
61、可选的,所述方法还包括:
62、对所述目标应用平台关联的多台自动投放设备的维护状态进行检测,其中,所述维护状态包括设备运行状态,食物存储状态和食物卫生状态,所述设备运行状态用于指示对应的自动投放设备的运行情况,所述食物存储状态用于指示对应的自动投放设备中存储的食物的剩余量,所述食物卫生状态用于指示对应的自动投放设备中存储的食物的卫生情况;
63、生成所述维护状态对应的提示指令。
64、可选的,所述生成所述维护状态对应的提示指令,包括:
65、在检测到所述设备运行状态用于指示多台所述自动投放设备中第一自动投放设备运行故障的情况下,生成携带了所述第一自动投放设备的第一设备信息的第一提示指令,其中,所述第一设备信息包括所述第一自动投放设备的故障信息,设备标识和设备位置;
66、将所述第一提示指令发送至所述目标应用平台对应的第一管理帐号。
67、可选的,所述生成所述维护状态对应的提示指令,包括:
68、在检测到所述食物存储状态用于指示多台所述自动投放设备中第二自动投放设备存储的食物的剩余量不足的情况下,生成携带了所述第二自动投放设备的第二设备信息的第二提示指令,其中,所述第二设备信息包括所述第二自动投放设备的食物的剩余量信息,设备标识和设备位置;
69、将所述第二提示指令发送至所述目标应用平台对应的第二管理帐号。
70、可选的,所述生成所述维护状态对应的提示指令,包括:
71、在检测到所述食物存储状态用于指示多台所述自动投放设备中第三自动投放设备存储的食物的存在变质的情况下,生成携带了所述第三自动投放设备的第三设备信息的第三提示指令,其中,所述第三设备信息包括所述第三自动投放设备的设备标识和设备位置;
72、将所述第三提示指令发送至所述目标应用平台对应的第三管理帐号。
73、可选的,所述方法还包括:
74、在所述目标图像信息用于指示所述目标动物图像中存在待救助的目标动物的情况下,生成目标求助信息,其中,所述目标求助信息关联了所述待救助的目标动物的所述目标动物图像,健康状态信息和求助需求信息,所述求助需求信息用于指示所述待救助的目标动物所需要的求助方式,以及所述目标动物图像拍摄时间和拍摄位置;
75、将所述目标求助信息发布于所述目标应用平台上的公共求助频道,其中,所述公共求助频道允许通过所述用户帐号访问。
76、根据本技术实施例的另一个实施例,还提供了一种自动投放设备,所述设备包括:图像摄像模块,图像识别模块和操作执行模块,其中,
77、所述图像摄像模块,用于对目标场景中的目标动物进行拍摄,得到目标动物图像,其中,所述目标动物为所述目标场景中目标类型的动物;
78、所述图像识别模块,用于对所述目标动物图像进行识别,得到目标图像信息,其中,所述目标图像信息包括所述目标动物的动物属性特征和空间深度特征,所述动物属性特征用于指示所述目标动物的数量信息和品种信息,所述空间深度特征用于指示所述目标动物图像中的所述目标动物与拍摄所述目标动物图像的设备之间的距离;
79、所述操作执行模块,用于根据所述目标图像信息执行目标投放操作,其中,所述目标投放操作用于为所述目标动物投放目标投放量的食物,所述目标投放量为与所述目标图像信息所指示的所述动物属性特征和所述空间深度特征相匹配的投放量。
80、根据本技术实施例的另一个实施例,还提供了一种投放操作的执行装置,应用于目标自动投放设备,包括:
81、拍摄模块,用于对目标场景中的目标动物进行拍摄,得到目标动物图像,其中,所述目标动物为所述目标场景中目标类型的动物;
82、识别模块,用于对所述目标动物图像进行识别,得到目标图像信息,其中,所述目标图像信息包括所述目标动物的动物属性特征和空间深度特征,所述动物属性特征用于指示所述目标动物的数量信息和品种信息,所述空间深度特征用于指示所述目标动物图像中的所述目标动物与拍摄所述目标动物图像的设备之间的距离;
83、第一执行模块,用于根据所述目标图像信息执行目标投放操作,其中,所述目标投放操作用于为所述目标动物投放目标投放量的食物,所述目标投放量为与所述目标图像信息所指示的所述动物属性特征和所述空间深度特征相匹配的投放量。
84、根据本技术实施例的又一方面,还提供了一种计算机可读的存储介质,该计算机可读的存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述投放操作的执行方法。
85、根据本技术实施例的又一方面,还提供了一种电子装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,上述处理器通过计算机程序执行上述的投放操作的执行方法。
86、在本技术实施例中,投放操作的执行方法包括:首先对目标场景中的目标动物进行拍摄,得到目标动物图像,其中,目标动物为目标场景中目标类型的动物;然后通过目标识别模型识别出目标动物图像中的目标图像信息,该目标图像信息可以指示目标动物图像中目标动物的动物属性特征和空间深度特征,动物属性特征用于指示目标动物的数量信息和品种信息,空间深度特征用于指示所述目标动物图像中的所述目标动物与拍摄所述目标动物图像的设备之间的距离;接着,根据所述目标图像信息执行目标投放操作,其中,所述目标投放操作用于为所述目标动物投放目标投放量的食物,所述目标投放量为与所述目标图像信息所指示的所述动物属性特征和所述空间深度特征相匹配的投放量,也就是说,在流浪动物的喂食的喂食过程中,食物的目标投放量并非是固定不变的,而是根据目标动物对应的目标动物图像中的目标图像信息生成的,即目标投放量为与所述目标图像信息所指示的所述动物属性特征和所述空间深度特征相匹配的投放量。采用上述技术方案,解决了相关技术中,在流浪动物的喂食过程中,食物的投放量与流浪动物的匹配度较低等问题,实现了提高在流浪动物的喂食过程中,食物的投放量与流浪动物的匹配度的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!