一种空间面状目标表面各向异性编码标记方法与流程
本发明涉及面状目标表面各向异性编码标记领域。更具体地,涉及一种空间面状目标表面各向异性编码标记方法。
背景技术:
1、目前,在空间试验鉴定以及空间失效卫星处理等领域,对于空间目标上的对称性表面,表面部位识别以及空间目标的位姿识别较为困难。现有技术一般通过在目标表面遍布传感器的方式实现空间目标的位姿识别以及表面部位识别定位,但该方法一方面由于目标表面需要大量的传感器,存在显著的用电负荷且设计复杂度高,另一方面也增加了空间目标的重量以及设计制造成本,并且不适用于空间非合作目标,这极大限制了空间目标表面部位识别技术以及空间目标位姿识别技术在空间试验鉴定、空间失效卫星处理等方面的应用。
2、在实现本发明过程中,发明人发现现有技术中至少存在如下问题:现有技术在进行空间目标表面部位识别以及空间目标位姿识别时依赖于有源信号传感器,存在较大的用电负荷,设计制造难度大,不利于降低整体重量和建造成本。
技术实现思路
1、本发明的目的在于提供一种不依赖于信号传感器、无功耗、低成本的空间面状目标表面各向异性编码标记方法,以解决现有技术存在的问题中的至少一个。
2、为达到上述目的,本发明采用下述技术方案:
3、本发明第一方面提供一种空间面状目标表面各向异性编码标记方法,包括:
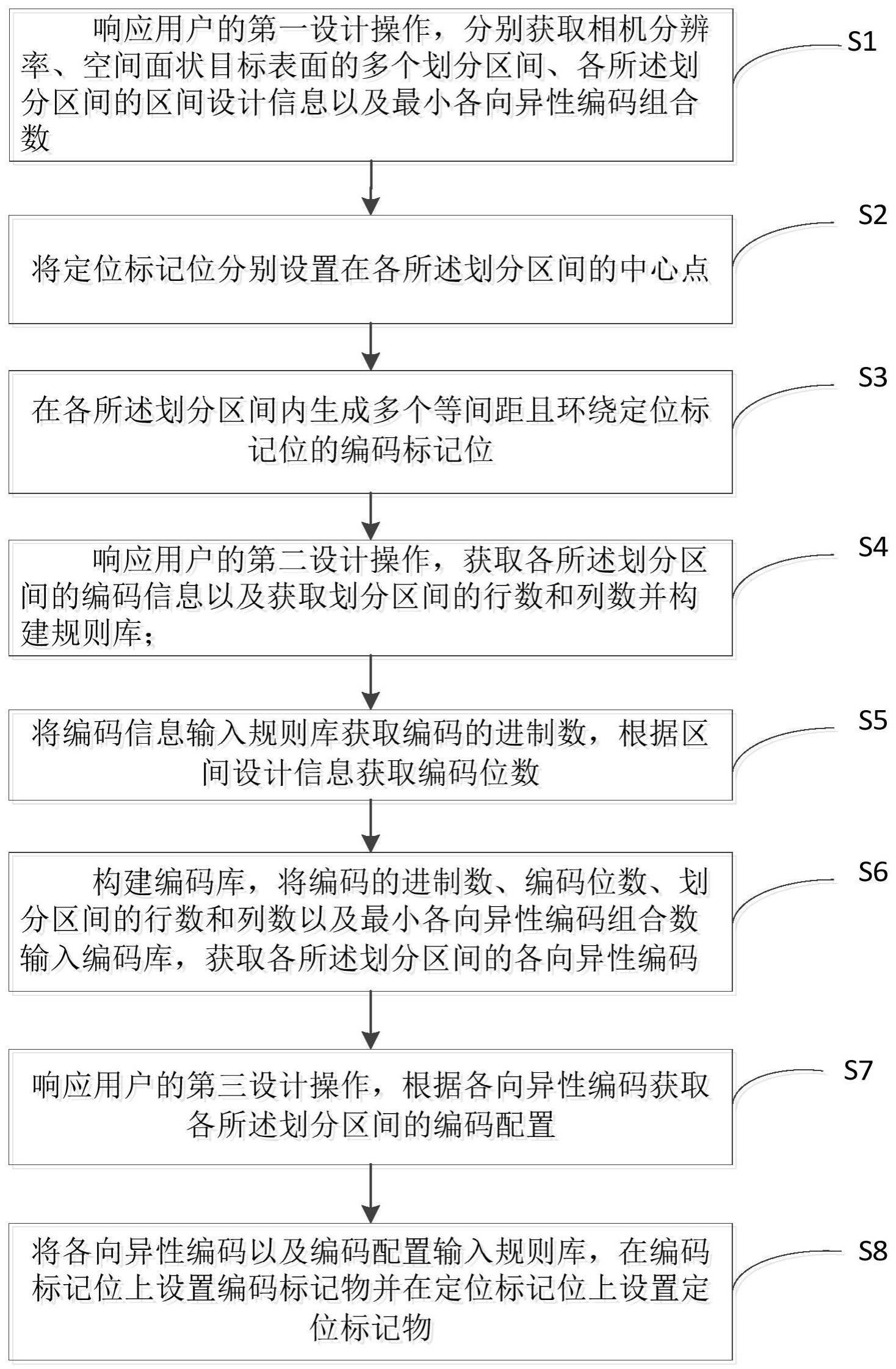
4、响应用户的第一设计操作,分别获取相机分辨率、空间面状目标表面的多个划分区间、各所述划分区间的区间设计信息以及最小各向异性编码组合数;
5、将定位标记位分别设置在各所述划分区间的中心点;
6、在各所述划分区间内生成多个等间距且环绕定位标记位的编码标记位;
7、响应用户的第二设计操作,获取各所述划分区间的编码信息以及获取划分区间的行数和列数并构建规则库;
8、将编码信息输入规则库获取编码的进制数,根据区间设计信息获取编码位数;
9、构建编码库,将编码的进制数、编码位数、划分区间的行数和列数以及最小各向异性编码组合数分别输入编码库,获取各所述划分区间的各向异性编码;
10、响应用户的第三设计操作获取各所述划分区间的编码配置;
11、将各向异性编码以及编码配置输入规则库,在编码标记位上设置编码标记物并在定位标记位上设置定位标记物。
12、进一步地,所述区间设计信息包括标记物数量信息、尺寸信息以及间距信息;
13、所述标记物数量信息用于确定编码标记物的数量;其中,所述编码位数等于编码标记位数量与定位标记位数量的和;所述定位标记位数量位1;
14、所述尺寸信息包括编码尺寸以及定位尺寸;所述编码尺寸用于确定编码标记物的尺寸;所述定位尺寸用于确定定位标记物的尺寸;
15、所述间距信息包括区间间距以及编码间距,所述编码间距用于确定划分区间内各编码标记位之间的距离,所述区间间距用于确定所述划分区间边缘与该划分区间内紧邻划分区间边缘的编码标记位之间最短垂直距离。
16、进一步地,所述编码标记物尺寸以及定位标记物尺寸分别满足如下条件:
17、r1≥2l;
18、r2≥2l;
19、其中,r1为编码标记物尺寸,l为相机分辨率,r2为定位标记尺寸;
20、所述编码间距以及区间间距分别满足如下条件:
21、d1≥2l;
22、d2≥l;
23、其中,d1为编码间距,l为相机分辨率,d2为区间间距;
24、所述编码标记物尺寸与所述定位标记物尺寸不相等,且所述定位标记物尺寸大于编码标记物尺寸。
25、进一步地,所述编码信息包括颜色信息、形状信息;
26、所述颜色信息用于分别确定编码标记物和定位标记物在编码时所采用的颜色种类;
27、所述形状信息用于分别确定编码标记物和定位标记物在编码时所采用的形状种类。
28、进一步地,所述编码配置包括编码起点、编码终点以及编码方向;
29、所述规则库沿所述编码方向,从编码起点向编码终点编码,所述编码的方式为在编码标记位上设置编码标记物并在定位标记位上设置定位标记物,其中,沿所述编码方向,各向异性编码所对应的数字与编码标记物和定位标记物组合所对应的数字一一对应。
30、进一步地,所述规则库用于根据编码信息确定编码的进制数,并分别为定位标记位和编码标记位编码;所述规则库包括:编码标记物的规则库以及定位标记物的规则库。
31、进一步地,编码标记物的规则库包括:
32、当所述编码标记物的颜色信息种类数和所述编码标记物的形状信息种类数均大于1时,则构成颜色信息为高位,形状信息为低位,或构成颜色信息为低位,形状信息为高位的编码标记物;
33、根据公式1:
34、jb1=max(xb1,yb1)+1;
35、计算当所述编码标记物的颜色信息种类数和编码标记物的形状信息种类数均大于1时进制数;其中,jb1为当所述编码标记物的颜色信息种类数和编码标记物的形状信息种类数均大于1时进制数,xb1为当所述编码标记物的颜色信息种类数和编码标记物的形状信息种类数均大于1时形状信息数量;yb1为当所述编码标记物的颜色信息种类数和编码标记物的形状信息种类数均大于1时颜色信息数量;
36、当所述编码标记物的颜色信息种类数和当所述编码标记物的形状信息种类数中的至少一项等于1时,编码标记物为颜色信息和形状信息的组合;
37、根据公式2:
38、jb2=xb2×yb2+1;
39、计算当所述编码标记物的颜色信息种类数和当所述编码标记物的形状信息种类数中的至少一项等于1时;其中,jb2为当所述编码标记物的颜色信息种类数和当所述编码标记物的形状信息种类数中的至少一项等于1时进制数,xb2为当所述编码标记物的颜色信息种类数和编码标记物的形状信息种类数均大于1时形状信息数量;yb2为当所述编码标记物的颜色信息种类数和当所述编码标记物的形状信息种类数中的至少一项等于1时颜色信息数量。
40、进一步地,所述定位标记物的规则库包括
41、当所述定位标记物的颜色信息种类数和定位标记物的形状信息种类数均大于1时,则构成颜色信息为高位,形状信息为低位,或构成颜色信息为低位,形状信息为高位的定位标记物;
42、根据公式3:
43、jd1=max(xd1,yd1)+1;
44、计算当所述定位标记物的颜色信息种类数和定位标记物的形状信息种类数均大于1时进制数;其中,jd1为当所述定位标记物的颜色信息种类数和定位标记物的形状信息种类数均大于1时进制数,xd1为当所述定位标记物的颜色信息种类数和定位标记物的形状信息种类数均大于1时形状信息数量;yd1为当所述定位标记物的颜色信息种类数和定位标记物的形状信息种类数均大于1时颜色信息数量;
45、当所述定位标记物的颜色信息种类数和所述定位标记物的形状信息种类数中的至少一项等于1时,定位标记物为颜色信息和形状信息的组合;
46、根据公式4:
47、jb2=xb2×yb2+1;
48、计算当所述定位标记物的颜色信息种类数和当所述定位标记物的形状信息种类数中的至少一项等于1时;其中,jb2为当所述定位标记物的颜色信息种类数和当所述定位标记物的形状信息种类数中的至少一项等于1时进制数,xb2为当所述定位标记物的颜色信息种类数和定位标记物的形状信息种类数均大于1时形状信息数量;yb2为当所述定位标记物的颜色信息种类数和当所述定位标记物的形状信息种类数中的至少一项等于1时颜色信息数量。
49、进一步地,所述将编码的进制数、编码位数、划分区间的行数和列数以及最小各向异性编码组合数分别输入编码库,获取各所述划分区间的各向异性编码包括:
50、通过编码库生成行数为划分区间的行数,列数为划分区间的列数,进制为编码的进制数,位数为编码位数的随机编码数集;
51、对随机编码数集中相邻的随机编码进行组合,各组合中的随机编码的个数为最小各向异性编码组合数;遍历组合后的随机编码数集,判断所述随机编码数集中的各组合后的随机编码是否各向异性,若是则生成各划分区间的各向异性编码;否则生成新的随机编码的组合,替换随机编码数集中非各向异性的随机编码的组合并返回本步骤;
52、其中,所述对随机编码数集中相邻的随机编码进行组合是按照同一规律分布的任意多个相邻的随机编码组合,在组合的随机编码各向异性时,该组合在随机编码数集中唯一;
53、所述最小各向异性编码组合数由空间目标最小观测面积和最小观测面积内划分区间数量共同决定,所述最小各向异性编码组合数取值最小为1,最大不超过最少观测面积内编码区间数量;其中最小观测面积是指在天光地影和观测条件、目标表面遮挡或缺损等因素影响下空间面状目标表面的最小相机成像面积。
54、进一步地,在将各向异性编码以及编码配置输入规则库,在编码标记位上设置编码标记物并在定位标记位上设置定位标记物后,所述方法还包括:
55、通过相机获取空间面状目标表面的图片;
56、识别图片上的定位标记物或定位标记位,通过规则库解码获取区间补码;
57、识别与所述定位标记物相邻的编码标记物或编码标记位,调用规则库,为编码标记物解码生成区间编码;
58、合并区间编码和区间补码获取区间信息码;
59、将区间信息码与各所述划分区间上的各向异性编码比对,确定区间信息码所在的划分区间;
60、若单一区间信息码无法唯一配对时,则进一步根据最小各向异性组合数确定的邻域区间码进行组合配对,确定区间信息码所在的划分区间;
61、获取相机位置以及相机转角并根据区间信息码所在的区间获取空间面状目标的位姿。
62、本发明的有益效果如下:
63、无源高精度定位:通过编码库生成各向异性编码,并根据各向异性编码在编码标记位上设置编码标记物并在定位标记位上设置定位标记物。以此达到为划分区间进行编码的目的无需依靠有源传感器即可实现对空间面状目标各部位的精确定位,尤其适用于空间非合作目标的表面部位测量;
64、各向异性明显:采用基于划分区间的区块化表面编码方案,通过由编码标记物和定位标记物构成的不同区间信息码的排列组合分布实现了空间面状目标表面的明显的各向异性编码;
65、低标记密度:通过合理设计区间信息码的种数、编码标记物和定位标记物的种数、方形区块的尺寸,可以在不影响表面各向异性特征的基础上实现空间目标表面的标记密度最低化,相比其它方式可显著降低标记对目标表面特性的影响;
66、天光地影和观测条件适应性强:通过合理设计区间信息码的重用率,可实现最低仅需观测到一个编码标记物或定位标记物即可对表面部位进行识别,对复杂天光地影条件和观测条件的适应能力强。
- 还没有人留言评论。精彩留言会获得点赞!