一种物流末端包裹的配送方法
本发明涉及物流配送,尤其涉及一种基于微小型无人物流配送机器人的物流末端包裹的配送方法。
背景技术:
1、近年来,随着电子商务在我国的快速发展,其已逐渐成为现今的主流商务模式。对于电子商务来说,物流由于发展相对较晚,因此经常会成为制约发展的瓶颈。对于商家来说,为了向比较集中的消费人群提供配送物流服务,通常会在区域内或区域周边建立货品的配送站点。这些配送站点基本都是由人工进行接货,并在配送站点内进行手工验货、卸载和分拣,然后再将分拣后的包裹根据其对应的目的地,通过派送员进行运输和投递。随着物流自动化的发展,各种无人物流配送工具得到了快速的发展,其中,无人机配送、无人配送机(例如,公告号为cn113104133b的中国发明专利、公告号为cn209125828u的中国实用新型专利、公开号为cn109278056a的中国发明专利申请、公开号为cn109911489a的中国发明专利等)和无人配送车(例如,公开号为cn106338993a的中国发明专利申请)已被应用到包裹的运送和投递中,以部分或完全的代替人工的运送投递操作,从而节约占用的人力。
2、由于无人机所能够承载的重量有限,通常一次只能送一个小包裹,并且需要专业技术人员操作,成本较高,因此,其并没有被广泛应用。相较于无人机,无人配送机和无人配送车,其所能够承载的货物更多,尤其是无人配送车,其一次性配送大量包裹,因此,无人配送机和无人配送车成为了当前的研究热点,并相继提成了各种调度方法。
3、例如,公开号为cn106855966a的中国发明专利申请,公开了一种无人配送车的调度方法及系统,其根据无人配送车辆的可用时间将所有无人配送车辆进行排序,同时,根据同一目的区域的装车单的生成时间进行排序,然后将无人配送车辆和装车单进行一一匹配生成调度单。即从车辆和订单两个维度考虑,提高了车辆的利用率及订单的处理效率,使得整个工作流程人工参与度低,进而提高了无人配送车配送货物的效率。
4、又如公开号为cn107093046a的中国发明专利,其公开了一种无人配送车调度方法,其基于距离为各个无人配送车分配相应的任务集,然后由相邻的两个无人配送自行进行协商以交换任务点。
5、这种调度方式仅仅适用于一次性装载大量包裹的无人配送车辆。这是因为一个站点所服务的群体数量是一定的,而这种无人配送车辆一次性装载的包裹量较多,同时受限于地理位置和成本,相应站点所配备的无人配送车辆的体量通常较小,因此,为了将所有无人配送车辆进行合理利用,就需要根据所有车辆的可用时间来进行调度。然而,这种调度方式面临的问题在于:一方面,由于每个无人配送车辆用于装载包裹的容纳空间的尺寸的既定的,因此,当有包裹的尺寸(例如,长度,或宽度,或者高度)不符合该容纳空间的尺寸,也就无法通过无人配送车辆进行配送了,例如,大冰箱、床垫等大型包裹。另一方面,由于无人配送车辆的装载量较大,若一个无人配送车中所有包裹的配送目的区域相同的,而当相同目的区域的包裹不能够满足相应要求,例如,不能够装载满一个无人配送车辆时,还需要等待相同目的区域的新包裹到来才能够进行配送;若一个无人配送车中所有包裹的配送目的区域不同,不仅需要车辆在不同目的区域之间配送,还需要规划最优路径,或者与其他车辆之间进行协调,这就对配送车辆的智能化要求高,相应地成本也更高;并且由于单车的送货量较大,当已经送出部分货物之后,就空闲了相应部分的储物空间,使得储物空间利用率不高。
6、再如公开号为cn109911489a的中国发明专利申请,以及公开号为cn109034684a的中国发明专利申请,由于每个配送机器人一次只派送一个包裹,因此,需要根据配送机器人的工作状态来进行调度,例如为空闲状态的配送机器人自动匹配一个待配送包裹,然后自动进行配送。
7、这种调度方式仅仅适用于运送中型包裹的无人配送机。这是因为这种无人配送机是从单一用户的单一包裹的精确配送的角度考虑,因此,相较于无人配送车而言,通常将无人配送机的货舱设置的较小,并且,为了将所有无人配送机进行合理利用,就需要根据所有配送机的工作状态来进行调度。然而,这种调度方式面临的问题在于:一方面,由于每个无人配送机用于装载包裹的容纳空间的尺寸的既定的,因此,当有包裹的尺寸(例如,长度,或宽度,或者高度)不符合该容纳空间的尺寸,也就无法通过无人配送机进行配送了,例如,大冰箱、床垫等大型包裹。另一方面,由于无人配送机一次仅配送一个用户的一个包裹,若该包裹尺寸较小,那么不仅使得储物空间没有被充分利用,无人配送机也并没有被充分利用。
8、由此可知,现有技术中,都是针对固定尺寸的无人配送车或无人配送机器人进行调度以进行包裹配送,目前并没有针对可变尺寸的物流配送机器人进行调度以完成包裹配送的方法和系统。
技术实现思路
1、本发明的目的在于提供一种物流末端包裹的配送方法,部分地解决或缓解现有技术中的上述不足,灵活性更高。
2、为了解决上述所提到的技术问题,本发明提供了一种物流末端包裹的配送方法,其包括步骤:
3、第一用户终端响应于第一用户的第一操作,生成相应的配送请求,并发送至配送中心;所述配送请求包括所述第一用户的用户id和预约配送时间段;
4、配送中心响应于所述配送请求,根据所述用户id从数据库中获取所述第一用户的配送信息,以及相同预约配送时间段的所有其他第一用户的配送信息;所述配送信息包括:所述第一用户的待配送包裹的数量,每个待配送包裹的尺寸信息、包裹唯一标识码,以及对应的配送地址信息、对应的用户id、预约配送时间段;
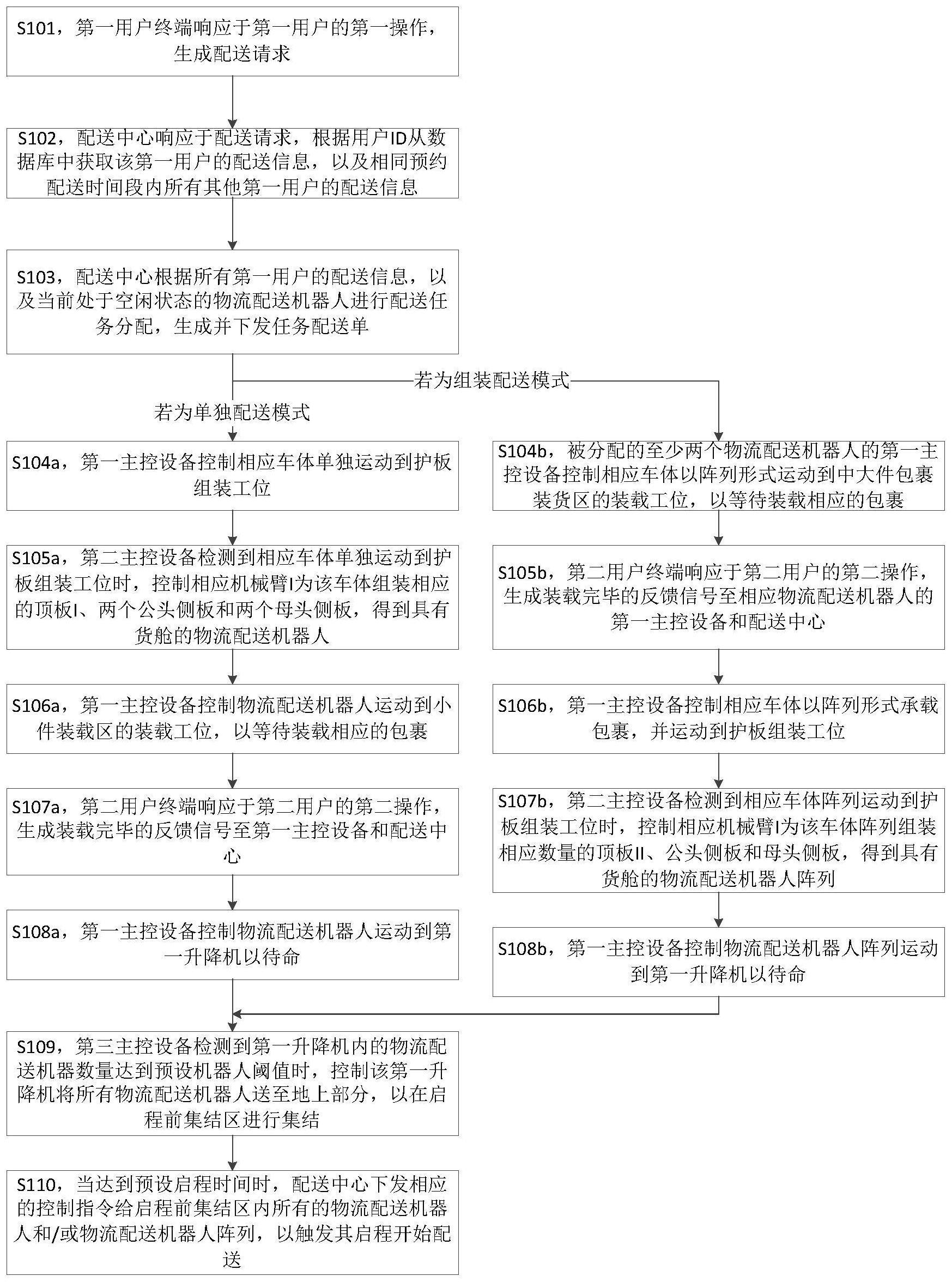
5、配送中心根据所获取的所有第一用户的配送信息,以及当前处于空闲状态的物流配送机器人进行配送任务的分配,并生成对应于每个物流配送机器人的配送单和配送模式,并下发至相应的物流配送机器人的第一主控设备、第二用户终端和护板组装车间的第二主控设备;所述配送模式包括独立配送模式和组装配送模式;
6、第二主控设备检测到所述配送机器人的车体到达护板组装工位时,根据所述独立配送模式和所述组装配送模式为所述车体组装相应数量和类型的护板;
7、第一主控设备响应于所述独立配送模式,先控制车体独立运动至护板组装工位以进行护板组装,且当完成护板组装后,再独立运动至小件包裹装货区的装货工位以进行货物装载;或者响应于所述组装配送模式,控制至少两个车体进行车体组装后运动至中大件包裹装货区的装货工位,且当装载完后,运动至护板组装工位以进行护板组装;以及根据所述独立配送模式或所述组装配送模式中的配送路径进行配送;
8、其中,所述独立配送模式包括:一对多配送模式:针对同一配送地址的多个用户id,分配一个物流配送机器人来配送相应的第一包裹,其中,所述第一包裹的数量等于所述物流配送机器人中储物空间的数量;所述组装配送模式包括:针对当前用户id,分配至少两个物流配送机器人进行组装配送相应的第三包裹或多个第二包裹;第一包裹的尺寸<第二包裹的尺寸≤单个物流配送机器人的货舱的尺寸<第三包裹的尺寸。
9、本发明的一些实施例中,所述独立配送模式还包括一对一配送模式:针对当前用户id分配一个物流配送机器人配送相应的多个第一包裹和/或单个第二包裹;其中,多个第一包裹的总尺寸大于第二包裹的尺寸,且小于所述物流配送机器人的货舱尺寸;或者,多个第一包裹和单个第一包裹的总尺寸小于或等于所述物流配送机器人的货舱尺寸。
10、本发明的一些实施例中,配送中心根据所述获取的所有第一用户的配送信息,以及当前处于空闲状态的物流配送机器人进行配送规划,并生成对应于每个物流配送机器人的配送单和配送模式的步骤,具体包括步骤:
11、配送中心根据当前第一用户的用户id在数据库中获取所述当前第一用户的所有待配送包裹的总尺寸,判断所有待配送包裹的总尺寸是否大于单个物流配送机器人的货舱尺寸;若是,判定当前需要进行组装配送;否则,判定当前无需进行组装配送;
12、若为独立配送,为当前第一用户分配一个物流配送机器人,并根据当前第一用户的配送信息、所分配的物流配送机器人的唯一标识码生成相应的配送单;
13、若需要组装配送,根据所有包裹的总尺寸为当前第一用户分配相应数量的物流配送机器人,并根据所述配送信息、所分配的所有物流配送机器人的唯一标识码生成相应的配送单。
14、本发明的一些实施例中,所述方法还包括步骤:
15、配送中心判断所述预约配送时间段是否在预设配送时间段内;
16、若所述预约配送时间段未在预设配送时间段内,生成所述独立配送模式或所述组装配送模式的同时,生成相应的提醒消息并下发至相应物流配送机器人的第一主控设备、第二用户终端和第二主控设备,以使得物流配送机器人在所述预设配送时间段结束前装载好包裹后,根据所述预约配送时间段进行配送。
17、本发明的一些实施例中,所述物流末端包裹的配送方法还包括步骤:
18、配送中心判断当前是否达到预设的集结出发时间,
19、若是,生成相应的控制指令并下发至当前集结在启程集结区的所有物流配送机器人,以触发各物流配送机器人以车队形式统一出发。
20、本发明的一些实施例中,所述物流末端包裹的配送方法还包括步骤:
21、第一主控设备根据配送地址中的小区名称将车队拆分为不同的配送小队进行配送;且当所述配送小队进入相应小区后,根据配送地址中不同的楼栋或单元,再次拆分为不同的配送小队或独立的个体进行配送。
22、本发明的一些实施例中,所述物流末端包裹的配送方法还包括步骤:
23、配送中心判断当前等待时间是否达到预设的等待时间阈值,若是,生成提醒消息并发送至相应的第一用户终端以提醒相应的第一用户超时将产生超时费用。
24、本发明的一些实施例中,所述物流末端包裹的配送方法还包括步骤:
25、第一用户终端响应于第一用户的第三操作,生成相应的取件请求,并发送至配送中心;所述取件请求包括取件码和用户id;
26、配送中心响应于所述取件请求,生成相应的解锁控制指令给相应的所述物流配送机器人的第一主控设备;
27、第一主控设备响应于所述解锁控制指令,控制打开相应的货舱盖或者侧板。
28、本发明的一些实施例中,所述物流末端包裹的配送方法还包括步骤:
29、第一主控设备控制物流配送机器人运动到第一升降机;
30、第三主控设备检测到所述第一升降机内的有物流配送机器人时,控制所述第一升降机将物流配送机器人送至地上部分,以在启程前集结区进行集结待命。
31、本发明的一些实施例中,所述物流末端包裹的配送方法还包括步骤:
32、第一主控设备控制完成配送任务的物流配送机器人运动到第二升降机;
33、第四主控设备检测到所述第二升降机内的有物流配送机器人时,控制所述第二升降机将物流配送机器人送至地下部分,以回到充电柜进行充电待命。
34、有益效果:现有技术的无人配送车,大多是从配送量的角度切入来提升配送效率,希望通过一次性装载和配送大量包裹,这样能够大大提升配送效率。因此,其配送方式或调度方式,通常是在一个配送车内装载不同地址的不同用户的包裹。这就使得当任一用户迟到,都会导致后续用户的包裹被延迟配送,也即产生连锁反应,反而一定程度地降低了配送效率。另一方面,由于每个无人配送车辆可装载大量的包裹,而当大部分包裹被取出后,车内实际上就具有闲置的多余空间,但也只能够等到所有包裹配送完之后,回到站点再重新装置包裹后再重新出发,降低了储物空间利用率,而当站点服务的区域较广(例如,多个小区)时,相应地,所需要的无人配送车辆的体量就要大,这不仅使得站点运营成本增加,也一定程度地造成了资源浪费;并且,车辆体量增加,相应地站点对应的停放空间也需要扩大,相应的调度方法也更加复杂,不仅增加了制造成本,其选址也有一定困难,尤其是在已经成熟的小区附近构建站点情况下。
35、现有技术的无人物流配送小车或无人机配送,大多是从精准一对一配送的角度切入来提升用户体验,因此,其配送方式或者调度方法通常是一次性配送一个用户的一个包裹,然而,由于其采用固定尺寸大小,用于配送单一用户的单一小尺寸包裹就降低了储物空间利用率,并且,还不能够配送大尺寸的包裹,另外,若要同时配送同一用户的多个包裹时,就需要同时派送多个配送小车各自进行独立配送,这不仅进一步降低了储物空间利用率,也增加了服务站点的运营成本。
36、本发明中的配送方法,由于是从提供利用储物空间利用率的角度切入,根据同一预约配送时间段内的所有第一用户的配送信息,以及当前处于空闲状态的物流配送机器人进行任务分配,具体地,根据待配送包裹的尺寸来判断当前需要单个物流配送机器人来进行独立配送,还是需要多个物流配送机器人进行组装配送,也即可以根据待配送包裹的尺寸大小来适应性地改变货舱尺寸大小,灵活性较高,从而在提高货舱利用率的同时,提高配送效率。例如,若某个第一用户的第一包裹数量小时,就将其与同楼栋或同单元的其他第一用户的第一包裹进行混合配送,即共用一个物流配送机器人来进行配送,相较于单独为一个用户的小包裹单独分配一个物流配送机器人的方式,大大提升了货舱的利用率,也提高了配送效率;又如某个第一用户的第二包裹数量较多,或者,有第三包裹时,就可根据所有待配送包裹的总尺寸来计算所需物流配送机器人的数量,然后组装进行配送。
- 还没有人留言评论。精彩留言会获得点赞!