一种基于cesium的输电线路规划动态种植方法及系统与流程
本发明涉及工具软件,特别是一种基于cesium的输电线路规划动态种植方法及系统。
背景技术:
1、输电全景三维可视化是当下一个热门的技术领域,在输电线路规划业务中能得到更好的应用,通过虚拟的三维场景中展示规划线路的成果,做到所见即所得,cesium三维可视化插件是基于webgl技术延伸出来的web插件,支持javasript api接口,通过一些三维场景应用实现具体的业务效果,一比一的再现输电规划成果数据。传统的线路种植采用的是基于参数化的杆塔坐标结合杆塔类型进行种植,至于杆塔之间的连接线路,通过杆塔中心坐标进行连接,只能做简单的示意,无法一比一的再现线路上的真实场景,在输电线路的设计和建设中,确定杆塔上绝缘子的挂靠点是非常重要的一环。
2、传统的确定方法主要依赖经验和手动计算。通常,电力工程师会依据输电线路的参数(如电压等级、输电距离、地形地貌等)以及绝缘子的性能参数,通过查阅手册和利用经验公式,进行大量的手动计算和试错,以确定挂靠点的大致位置。然后再通过实地勘查和试验,对挂靠点位置进行微调。因为经验公式往往是基于理想化的假设,忽视了很多实际工况中的复杂因素,如气候条件、地形地貌、风荷载等。这就可能导致实际的挂靠点位置与计算结果存在偏差。其次,这种方法的效率较低。因为它需要进行大量的手动计算和试错,而且每一次参数的变化都可能需要重新计算,这无疑增加了设计的工作量。方法的灵活性和适应性也有限,主要依赖于经验和规则,很难适应各种不同的工况和需求,也不利于进行系统的优化。
技术实现思路
1、在输电线路的日常巡检中,不管是人工巡检还是无人机巡检,对于导线的缺陷和隐患需要明确具体的位置,如果按照传统的三维线路效果是无法在gis系统中确定具体是那根导线的问题,而本发明可以实现所有导线的可视化效果,1比1的还原真实的现场环境,能够快速在三维场景中定位问题的具体位置,方便检修人员进行问题排查和消缺。鉴于现有的输电线路规划动态种植方法存在的问题,提出了本发明。
2、因此,本发明所要解决的问题在于如何提供一种基于cesium的输电线路规划动态种植方法及系统。
3、为解决上述技术问题,本发明提供如下技术方案:
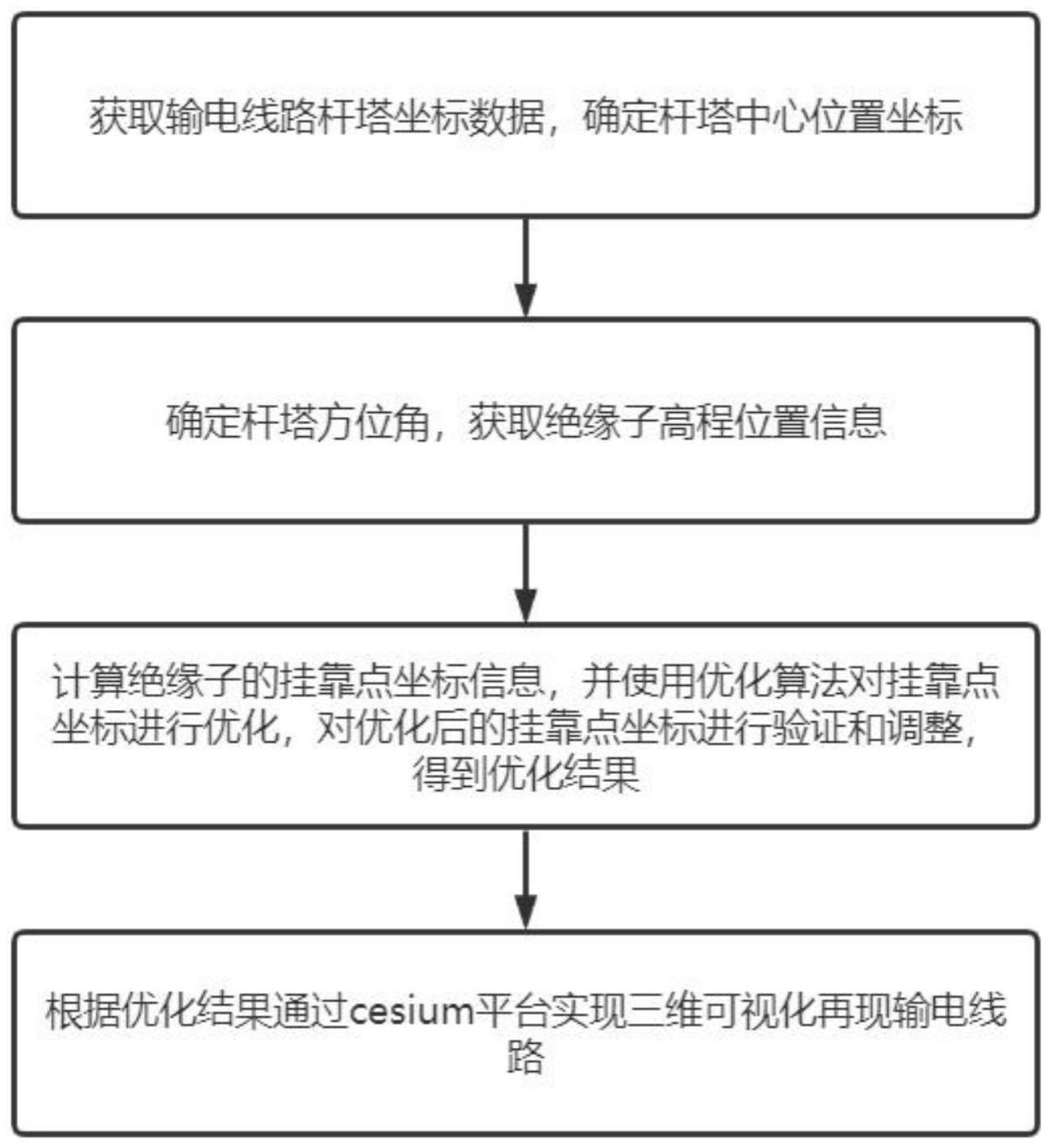
4、第一方面,本发明实施例提供了一种基于cesium的输电线路规划动态种植方法,其包括,获取输电线路杆塔坐标数据,确定杆塔中心位置坐标;确定杆塔方位角,获取绝缘子高程位置信息;计算绝缘子的挂靠点坐标信息,并使用优化算法对挂靠点坐标进行优化,对优化后的挂靠点坐标进行验证和调整,得到优化结果;根据优化结果通过cesium平台实现三维可视化再现输电线路。
5、作为本发明所述基于cesium的输电线路规划动态种植方法的一种优选方案,其中:所述杆塔包括直线杆塔、跨越杆塔、耐张杆塔以及t接杆塔。
6、作为本发明所述基于cesium的输电线路规划动态种植方法的一种优选方案,其中:所述确定杆塔方位角具体包括,获取已知a(x1,y1)、b(x2,y2)和c(x3,y3)三个点为相邻的三个杆塔坐标;判断杆塔是否为转角塔,当杆塔不是转角塔时,以东西经度方向为x轴,a杆塔的方位角为arctan(x1,y1)/π*180;当杆塔为转角塔时,计算b杆塔的方位角,ab段针对x轴的角度为α1=arctan((y2-y1),(x2-x1))/(π/180);bc段针对x轴的角度为α2=arctan((y3-y2),(x3-x2))/(π/180);则b杆塔的方位角为α=(α1+α2+90)/2;依次计算获取线路上所有杆塔的方位角。
7、作为本发明所述基于cesium的输电线路规划动态种植方法的一种优选方案,其中:所述计算挂靠点坐标包括,已知基点为杆塔中心位置坐标,点2为绝缘子终端挂靠点,以正北为0度;计算点2的经度和纬度,计算公式如下:
8、
9、
10、h2=h1+h
11、式中,long2为点2经度;long1为基点的经度;arc1为地球纬度切面周长;lat2为点2纬度;lat1为基点纬度,arc2为地球经度切面周长;h2为点2高程,h1为基点高程,h为两点之间高度差;确定点2的经纬度和高程,依次计算得出杆塔上所有挂靠点的空间坐标。
12、作为本发明所述基于cesium的输电线路规划动态种植方法的一种优选方案,其中:所述优化算法具体包括,使用优化算法对挂靠点坐标设定坐标更新规则,得出优化后的坐标位置信息;对优化后的坐标位置信息进行验证和调整,通过计算绝缘子挂靠点坐标更新后的电场强度和机械强度;定义目标函数检验优化后的坐标信息;对挂靠点坐标x[i]=(x,y,z)定义坐标更新规则,每个粒子代表一个可能的挂靠点坐标,在搜索空间中寻找最优解;粒子的位置和速度随着迭代而更新,更新规则如下:
13、v′[i]=w*v[i]+c1*rand()*(pb[i]-x[i])+c2*rand()*(gb-x[i])
14、x′[i]=x[i]+v′[i]
15、式中,v′[i]是粒子i更新后的速度,v[i]是粒子i的速度,x′[i]为粒子i更新后的位置,x[i]是粒子i的位置,pb[i]是粒子i到此时刻为止找到的最好位置,gb是所有粒子到此时刻为止找到的最好位置;w、c1和c2是预设的参数,rand()是一个[0,1]之间的随机数。
16、作为本发明所述基于cesium的输电线路规划动态种植方法的一种优选方案,其中:电场强度计算具体包括,假设输电线路其导线电位为v,导线的半径为r,绝缘子的长度为d,计算绝缘子表面的电场强度e;导线是无限长的直线,空气是均匀的非导电介质,计算公式如下:
17、e=v/(r*ln(d/r))
18、时间谐波maxwell方程,在没有自由电荷和自由电流的情况下,它们可以被写为:
19、
20、
21、其中,e为电场强度,h为磁场强度,j是虚数单位,ω是角频率,μ是磁导率,ε是电容率;获得两个方程的弱形式,将两边同时与测试函数进行内积,并在全空间进行积分,得到如下公式:
22、
23、
24、式中,v和u分别是电场和磁场的测试函数;利用矢量微积分的恒等式,将公式改写为:
25、
26、
27、进行离散化处理,表示为一组基函数的线性组合:
28、
29、h=∑hi*φi
30、式中,e和h分别表示电场和磁场的矢量,它们是空间中的场分布;ei和hi分别表示电场和磁场在第i个有限元节点上的值,即有限元节点的场强;和ψi是基函数,是预定义的函数,用于在有限元之间进行插值;基函数在对应的节点上取值为1,在其他节点上取值为0;将表达式代入到弱形式中,获得一组线性方程组,计算求解每个基函数的ei和hi;机械强度计算公式如下:
31、ti=(wg+wi)*h+fw*d+tz*l
32、wg=m*g
33、fw=0.5*cd*a*rho*v2
34、wi=rhoice*g*aice*hice
35、式中,ti为根据挂靠点坐标计算的绝缘子机械强度,wg为重力,m是绝缘子的质量,g是重力加速度;fw为风荷载,cd为阻力系数,a为绝缘子面积,rho为空气密度,v为风速;wi为冰荷载,rhoice为冰的密度,aice为冰的接触面积,hice为冰厚度;tz为导线张力,l为导线长度。
36、作为本发明所述基于cesium的输电线路规划动态种植方法的一种优选方案,其中:目标函数定义为:
37、f(x[i])=|ei-em|+|ti-tm|+|x′-xm|+|y′-ym|+|z′-zm|
38、式中,f(x[i])为目标函数;ei为根据挂靠点坐标计算的绝缘子电场强度,em为最大电场强度,ti为根据挂靠点坐标计算的绝缘子机械强度,tm为最大机械强度,x′,y′,z′为此时挂靠点坐标,xm,ym,zm分别为挂靠点在空间上最大允许坐标;找到使得f(x[i])最小的x[i],此时把挂靠点坐标优化至新的x′[i]。
39、第二方面,本发明实施例提供了一种基于cesium的输电线路规划动态种植系统,其包括:数据获取模块,用于获取杆塔坐标数据信息以及绝缘子高程信息,供数据处理模块进行处理使用;数据处理模块,用于处理所述数据获取模块获取的各种数据,通过计算得出绝缘子挂靠点坐标信息;验证优化模块,用于对经处理后获取的坐标信息使用优化算法进行验证优化,优化坐标信息,将优化后的坐标信息传输至cesium平台;cesium平台,用于将经过优化的坐标信息进行处理分析,实现三维可视化再现输电线路。
40、第三方面,本发明实施例提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中:所述处理器执行所述计算机程序时实现上述基于cesium的输电线路规划动态种植方法方法的任一步骤。
41、第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,其中:所述计算机程序被处理器执行时实现上述基于cesium的输电线路规划动态种植方法方法的任一步骤。
42、本发明有益效果为可以真实的再现大规模规划输电线路业务中做到1比1的还原真实的三维场景,本方法基于物理和电气模型,能够充分考虑各种复杂因素,如气候条件、地形地貌、风荷载等,因此计算结果的准确性较传统方法有显著提高;利用优化算法自动寻找最优挂靠点位置,大大减少了手动计算和试错的工作量,提高了设计效率;通过优化挂靠点位置,可以降低因挂靠点位置不合理导致的故障概率,提高了输电线路的可靠性;可以根据不同的输电线路参数和绝缘子性能参数进行适应,具有很强的适应性和扩展性;引入的优化算法使得设计过程更加自动化,提高了设计的灵活性,也使得在未来的电力系统设计中有更多的可能性。
- 还没有人留言评论。精彩留言会获得点赞!